
Fターム[3E054GB08]の内容
包装位置への供給−物品の供給 (7,769) | 検知、制御(検知情報) (301) | 力、トルク (4)
Fターム[3E054GB08]に分類される特許
1 - 4 / 4
搬送装置
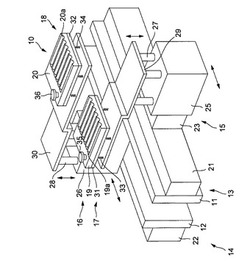
【課題】構造をシンプルにして小型化した搬送装置を提供する。
【解決手段】搬送装置10は、物品XA1を収容することができる複数のバケット19,20と、これらのバケット19,20を、水平方向に往復走行させる直動ロボット13,14と、バケット19,20を、鉛直方向に往復走行させるエアシリンダユニット15,16と、直動ロボット13,14およびエアシリンダユニット15,16を協働させて各バケット19,20を順次環状の移動軌跡上を循環させる制御部と、を備えている。
(もっと読む)
搬送装置

【課題】 簡易な構成でありながら、複数の袋を整列させると同時に密封状態の検査も行うことが可能な搬送装置を提供する。
【解決手段】 箱詰め装置1では、受入装置4において、新たに搬入された最後端の物品X1を第2後端保持部材64の保持プレート64a・64bによって挟み込んで縦向きの状態で整列させながら、物品X1に圧力をかけている。コントロールユニット92が、保持プレート64aの吊り下げ部分に取り付けられた圧力センサ65における検出結果に基づいて物品X1のシール不良の検査を行う。圧力センサ65における検出結果が、所定の値よりも小さい場合、あるいは徐々に検出される圧力が低下していく場合には、この物品X1をシール不良と判定する。一方、所定の値を上回っており、検出圧力が低下していかない場合には、この物品X1を正常品として判定する。
(もっと読む)
箱詰装置、整列ユニット、および整列方法
【課題】装置のスループットを低下させることなく複数の包装商品を立体的に整列させる整列ユニット、整列方法、および箱詰装置を提供する。
【解決手段】箱5の姿勢を開口面6cが横向きとなる姿勢から上向きとなる姿勢に変更する場合において、(1)まず、シリンダ325によってロッド326を矢印AR10方向に伸ばすことにより、イス部310に保持された箱5は回転軸322を中心に回動する。これにより、箱5の開口面6c側の高さ位置が、奥側の高さ位置と比較して高くなる。次に、シリンダ335によってロッド336を矢印AR11方向に縮めることにより、箱5は回転軸332を中心として回動する。これにより、箱5が、開口面6cを上向きとする姿勢に変更される。
(もっと読む)
搬送装置及びそれを備えた箱詰め装置
【課題】 受入位置で比較的偏平な物品を起立姿勢で受け入れ、所定個数に達した物品を集積状態で排出位置に搬送する場合に、少ない駆動手段で物品の受け入れを高速化することができる搬送装置及びそれを備えた箱詰め装置を提供する。
【解決手段】 起立姿勢の物品を集合状態で移送するバケット220の移送経路の上方かつ移送経路を挟んで両側に、後端保持部材駆動機構241,241を備える。各後端保持部材駆動機構241に、所定の経路を循環走行する一対のエンドレスチェーン254,254を配設し、該エンドレスチェーン254,254に、ほぼ等間隔かつ垂直姿勢となるように一対の後端保持部材248,248を連結する。そして、片側一対の後端保持部材248,248を単一のモータ249で移動させる。
(もっと読む)
1 - 4 / 4
[ Back to top ]