
Fターム[3E054GB10]の内容
包装位置への供給−物品の供給 (7,769) | 検知、制御(検知情報) (301) | その他 (41)
Fターム[3E054GB10]に分類される特許
1 - 20 / 41
選果システム
【課題】移送装置による載置台からトレイへの青果物の移送能率の低下を極力抑制するとともに、載置台からトレイへ青果物を移送する際に移送装置の吸着部に吸着された青果物が当該吸着部から落下することを抑制することができる選果システムを提供することを課題とする。
【解決手段】載置台搬送装置51によって搬送される載置台5に載置される青果物6を吸着部66で吸着してトレイ8へ移送する移送装置60を備え、載置台5に載置される青果物6をトレイに詰める、選果システム1であって、移送装置60は、青果物6を吸着した状態で吸着部66が上方へ移動するときの平均速度、または、青果物6を吸着した状態で吸着部66が下方へ移動するときの平均速度が、青果物6を吸着した状態で吸着部66が水平方向へ移動するときの平均速度に比べて遅い速度となるように構成される。
(もっと読む)
搬送装置、カートニングマシン及び対象物入りカートンの製造方法

【課題】対象物の向きを調節可能な搬送装置、カートニングマシン及び対象物入りカートンの製造方法を提供する。
【解決手段】搬送装置20は、円筒状の対象物Rを軸線Rxまわりに回転可能に支持しながら搬送する対象物コンベア21と、対象物コンベア21に搬送されている対象物Rを軸線Rxまわりに回転させる回転手段25と、回転手段25による対象物Rの軸線Rxまわりの回転量を制御する制御装置60とを備える。カートニングマシンは、搬送装置20と、対象物Rを収容するカートンを搬送するカートンコンベアと、対象物Rの表面の基準位置が所定の方向を向くように調節された対象物コンベア21上の対象物Rを、カートンコンベア上のカートンに挿入する挿入装置とを備える。
(もっと読む)
果実の容器詰め装置
【課題】出荷パック内に見栄え良くイチゴを整列する。
【解決手段】制御部は、マシンビジョン62が取得した収穫箱70に収容されたイチゴの画像に基づいてイチゴの吸着位置を検出し、イチゴ搬送装置10に、収穫箱70に収容されたイチゴを吸着保持させるとともに、中継コンベア40上にイチゴを一旦載置させる処理と、マシンビジョンが取得した中継コンベアに載置されたイチゴの画像に基づいてイチゴの向き及び吸着位置を検出し、イチゴ搬送装置に、中継コンベアに載置されたイチゴを吸着位置にて吸着保持させるとともに、イチゴの向きに基づいて出荷パック52A〜52Dにイチゴを搬送させる処理とを実行させる。
(もっと読む)
果実保持装置
【課題】イチゴを吸着保持する際のイチゴの損傷を抑制する。
【解決手段】制御部が、吸着前画像取得部により取得されたイチゴの画像から、イチゴの向きと吸着位置とを検出し(ステップS10,S12)、移動部を介して、一端部にイチゴと接触する接触部を有する筒状の吸着管を移動して、接触部をイチゴの吸着位置に接近させ、接触部がイチゴの吸着位置に接触する前に、吸着管の内部を負圧にする負圧発生機構の動作を開始する(ステップS18)。これにより、イチゴの方が、イチゴが載置されている面(載置面)から離れて吸着管に吸い寄せられるようになる。
(もっと読む)
物品移載装置および物品移載方法
【課題】箱体への物品の投入時に、物品が箱体の外にこぼれ落ちることを防止できる物品移載装置および物品移載方法を提供する。
【解決手段】箱体17の収納容積の種別を箱センサ36,37により判別し、箱体17に既に収納されている物品16の体積を、箱体17の上方に位置した距離センサ35により検出されるデータにより求め、箱体17内の物品16の容積が箱体17の収納容積の一定の比率以上のとき、ベルト送り装置28によるベルト体27の送り出しが終了する前にチェーン駆動モータ24を駆動してチェーン23a,23bの移動を開始し、それに伴うベルト体27の一方の端辺部27aの周回を開始する。これにより、ベルト体27が箱体17内の一定の比率以上の物品16の上に載ることに起因して、ベルト体27に支持された物品16が箱体17の外部に放り出されることが回避される。
(もっと読む)
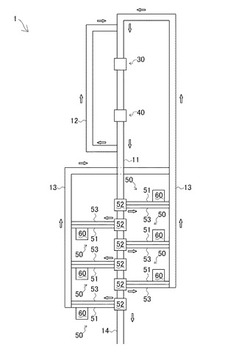
選果システム
【課題】表面が柔らかい青果物でも容易に箱詰めできる選果システムを提供する。
【解決手段】青果物6を載置した載置台5を上流側から下流側に搬送する主搬送手段が備えられ、主搬送手段には上流側から青果物6を載置台5上に載せる載置工程と、前記青果物6の品質を測定する品質計測工程と、前記品質計測工程の測定結果から等級や階級別に青果物6を選別してパック詰めするパック詰め工程とが設けられる選果システムにおいて、パック詰め工程は、主搬送手段の下流部で等級や階級別に分岐して搬送する複数の選別ライン30が設けられ、各選別ライン30の側方には、載置台5上に載置された青果物6のがく片側を吸着してパック48まで搬送し、整列させて吸着を解除してパック48内に詰めるパック詰めロボット33を備えるものとする。
(もっと読む)
フィルムガイド装置及びPTP包装機
【課題】 包装機本体側の振動の影響を可及的に抑制し、容器フィルムのポケット部内に収納される錠剤等の検査を正しく行えるようにすること
【解決手段】 容器フィルム1の搬送路を構成するガイドレール21に設けられた開口部21a,21bに、第1,第2下側フィルムガイド板23,24を配置し、各下側フィルムガイド板をガイドレール21に対して防振ゴム30を介して支持する。下側フィルムガイド板は、容器フィルムの下面に接触してそれを支えるので、包装機側から伝わるガイドレールの振動は、下側フィルムガイド板にはそのまま伝わることはなく、容器フィルムひいてはポケット部内の錠剤が暴れるのが抑制される。下側フィルムガイド板の所定位置に設けた窓孔23b,23c,24b〜24dで露出するポケット部・錠剤をカメラ装置で撮像できる。
(もっと読む)
長尺農作物の方向修正搬送装置
【課題】長尺農作物の方向修正搬送のオートメーション化。
【解決手段】長手方向の一端側の向きが搬送方向下流側方向でないと識別された長尺農作物Aを、この長尺農作物Aの一端側の向きを搬送方向下流側方向に向かせるように修正しながら、コンベア3Bの搬送方向と交差する方向を搬送方向とするシュータ6に送り出し、長手方向の一端側の向きが搬送方向下流側方向であると識別された長尺農作物Aを、その向きを保った状態でシュータ6に送り出すようにし、このシュータ6は、向きが修正されて送り出される長尺農作物Aを、その向きを保った状態で搬送する。
(もっと読む)
箱詰装置
【課題】起立姿勢の物品群の箱詰を可能にする箱詰装置を提供する。
【解決手段】箱詰装置は、包材からなる物品Bが隣接する物品と一部分が重なり合った状態で載置された物品群Cを位置Pまで搬送する搬送コンベア316R及び316Lと、所定位置Pにおいて物品群Cを起立姿勢にする立上部と、該起立姿勢となった物品群Cを所定位置Pから物品群Cが収容される段ボール箱まで移送するキャッチャ410とを備える。
(もっと読む)
横型製袋充填機の供給装置
【課題】物品の長さ寸法の変更に簡単に対応し得ると共に、柔らかい物品を損傷することなく一定間隔で搬送する。
【解決手段】供給コンベヤ14は、無端チェン12,12間に架設されて載置部を構成する多数の搬送バー13に物品Wを載置して搬送する。供給コンベヤ14に設けられた各空所Sに対応して配設されて供給コンベヤ14と一体的に走行する作動部材15は、空所Sを介して載置部から突出する作動位置と突出しない退避位置との間を移動する。供給コンベヤ14の物品搬送路の下方に、作動部材15を作動位置に保持して案内する固定ガイドレール21が配設される。固定ガイドレール21の上流側に配設した可動ガイドレール23が切替え手段22で上方位置に切替えられると、上流側から到来する作動部材15は可動ガイドレール23によって固定ガイドレール21に移行する。
(もっと読む)
デジタル秤用フィーダ及びそれを備えたデジタル秤
【課題】 デジタル秤用フィーダにおける振動の時間的変化に拘わらず、被計量物の搬送量を高精度に推定することができるデジタル秤用フィーダ及びそれを備えたデジタル秤を提供する。
【解決手段】 振幅検出手段である歪み検出部材3は、振動装置2によって生じるフィーダパン1の振動振幅aを検出する(ステップS104)。制御部41は、搬送量演算手段41bとして機能し、歪み検出部材3によって検出されたフィーダパン1の振動振幅aの時間的変化を積分して被計量物の推定搬送量Σを演算する(ステップS108)。さらに、制御部41は、制御手段41aとして機能し、推定搬送量Σに基づいて振動装置2の駆動振幅及び駆動時間の少なくとも何れか一方を制御する。
(もっと読む)
出荷トレイ装填装置
【課題】回転テーブルによる微小物体の搬送途中に姿勢を補正する構成であると、該回転テーブルのさらなる高速化が望めない点を解消する。
【解決手段】(出荷トレイ)装填装置1は、複数の未整列トレイMTと、これら複数の未整列トレイMTの各々の上方に設けられたカメラC0と、これら複数のカメラC0による撮像データに基づいて各々の未整列トレイMT上の微小物体(ワークW)をそれぞれ把持して整列させる複数の補正機構と、これら補正機構によって整列された微小物体が整列状態で載置されるバッファBと、このバッファBの微小物体の載置面及び出荷トレイSTの微小物体の送り出し面に亘って微小物体を移動させる回転テーブル4と、を有する。
【効果】複数の未整列トレイからバッファに至るまでに微小物体を整列させて送るから、回転テーブルの回転速度をさらに高速化できる。
(もっと読む)
箱詰め装置
【課題】 物品の移送ミスが生じた場合にその移送ミスを検出することができたり、ステップモータが脱調したときにその脱調したことを検出することができる。
【解決手段】 導入コンベアにより整列コンベア58に搬送されてきた物品を、押し出しプレート11によりにより予め定めた数ずつ取り出してこの取り出した物品をダンパー7上に移送して整列させ、この整列させた物品をその整列の長さ方向の両側から保持部76により挟み込み、この保持部により挟み込まれている物品を押し込みプレート13により上から押さえて外装箱2に詰める。押し込みプレート13が保持部76により保持されている物品を外装箱2内に押し込む押し込み位置に移動した後に元の待機位置に戻る方向に移動し始めてから押し出しプレート11が整列コンベア58上の次の物品をダンパー7上に移送する前までの間の所定のタイミングで、ダンパー7上に存在する物品を検出する検出部40cを設けた。
(もっと読む)
矯正装置、搬送ユニットおよび電子部品収納システム
【課題】電子部品に対してストレスを与えずに姿勢を矯正することができる矯正装置、搬送ユニットおよび電子部品収納システムを提供する。
【解決手段】カメラ4による電子部品の姿勢の検出結果に基づいて、矯正装置5のアライメントポケットを電子部品の姿勢に応じた位置に移動させてアライメントポケットに当該電子部品を収容させた後、この電子部品が所定の姿勢となるようアライメントポケットを移動させることにより、従来のように電子部品Aを挟み込まなくてよいので、電子部品Aに対してストレスを与えずに姿勢を矯正することができる。
(もっと読む)
円筒状物品の搬送装置、搬送結束装置及び搬送識別装置
【課題】円筒状物品を所定位置まで又は所定経路に沿って確実に搬送することができ、円筒状物品を安定に搬送する円筒状物品搬送装置を提供する。
【解決手段】列設されたローラ群からなるローラ列上に円筒状物品4を載置して所定方向に搬送する円筒状物品搬送装置において、ローラ列を少なくとも左ローラ列と右ローラ列に分割して並設した並列ローラとし、左右ローラ列は独立駆動される左ローラ群3と右ローラ群5から構成され、対向する左ローラ20と右ローラ21の為す挟角が所定方向に開始挟角から終了狭角に達するまで順次小さくなるように変化する左右ガイドローラ群からなるガイドローラ部14を設け、円筒状物品を開始挟角から終了狭角まで搬送して円筒状物品を並列ローラの中央部に整列させることを特徴とする円筒状物品搬送装置2である。
(もっと読む)
菓子などの移乗配列装置
【課題】上流側から順次送り込まれてくる菓子などを、走行中の配列コンベア上に複数列の縦列に横一列に配列可能とする菓子などの移乗配列装置を提供することである。
【解決手段】菓子などを一列縦隊に順次送り込むと共に鉛直軸を支点として水平方向に首振り自在な旋回コンベア1と、横移動自在であり、下流側のベルトの折り返し部となるベルト受け部が菓子などの搬送方向に水平移動自在とされる分配コンベア2を介して、下流側の配列コンベアB上に複数列の縦列に配列すると共に、前記配列コンベアのコンベア速度と、前記分配コンベアのコンベア速度と、菓子などを送り込むタイミングとから、走行中の配列コンベア上に横一列に整列すると共に複数列の縦列に順次配列するように、前記分配コンベアの横移動と前記ベルト受け部の水平移動とを制御する制御装置50を備える構成とした。
(もっと読む)
包装容器に製品を挿入するピッキングライン並びに方法
本発明は、包装容器に製品を挿入するピッキングラインであって、搬送方向(x)における製品(14)の供給及び搬送のためのコンベヤベルト(12)と、コンベヤベルト(12)における製品(14)のポジションを特定するためのポジション画像処理系(20)を備えた少なくとも1つのピッカ(18)とが設けられている形式のものに関する。このような形式のピッキングラインにおいて本発明の構成では、搬送方向(x)で見て少なくとも1つのピッカ(18)の上流側に、品質画像処理系(16)が配置されていて、該品質画像処理系(16)は、コンベヤベルト(12)上を搬送方向(x)において品質画像処理系(16)のところを通過する製品(14)を、所定の品質特徴に関して検査するために働き、かつ搬送方向(x)で見て品質画像処理系(16)の下流側に続くピッカ(18)に伝えられる、製品(14)の把持又は非把持のための制御命令として役立つ品質情報と、製品(14)との対応付けのために働く品質画像処理系(16)である。 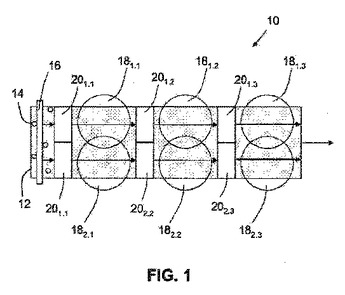 (もっと読む)
(もっと読む)
後端物品押し込みアセンブリ付カートン梱包機
物品梱包機は、梱包製造連の後端の物品を送り込みレーンの下方へ且つ梱包機のワークステーションに押すための後端物品押し込みアセンブリを含み、これにより後端の物品を梱包することができる。押し込みアセンブリは押し込みチェーンを備え、押し込みチェーンは、一方向へ曲がることが可能で自身に巻き回ることができ、また、チェーンのほぼ直線形態を越えて他の方向へ曲がることは不可能である。押し込みブロックが押し込みチェーンの自由端部に取り付けられている。  (もっと読む)
(もっと読む)
整頓装置とそれに用いる供給装置と整列装置と姿勢揃え装置
【課題】 簡易な構成で、複数の対象物の姿勢を揃える姿勢揃え装置を提供しようとする。
【解決手段】
従来の姿勢揃え装置にかわって、複数の対象物を保持する保持姿勢と開放する開放姿勢との間で各々に変化させる複数の把持機器と、複数の前記把持機器を各々に支持する複数の支持機器と、複数の前記支持機器を各々に回転させる回転機器と、複数の前記把持機器に各々に対応づけられ対応づけられた前記把持機器が保持する対象物の外周形状の少なくとも一部分を各々に検知できる複数の検知センサと、を備え、前記回転機器が複数の前記把持機器を各々に回転させている間に、複数の前記検知センサが複数の対象物の前記外周形状の一部分の設定形状が特定方向に向いたことを各々に検知した時に複数の前記検知センサに各々に対応づけられた複数の前記把持機器が姿勢を前記保持姿勢から前記開放姿勢に各々に変化させる、ものとした。
(もっと読む)
海苔束90度回転・整列方法及び装置
【課題】簡単な構造で海苔束90度回転動作と整列動作の速度を上げて高速処理に対応する。
【解決手段】集束装置から落下した海苔束8を受けて90度回転する受け板10と、上死点から下降する受け板10から90度向きを変えた海苔束8の積載時に停止し、載置後に始動して搬出する第1の搬送コンベヤ9を備えた海苔束90度回転装置と、搬送コンベア9で搬出される海苔束8を搬送し、整列時に停止し、整列後に海苔束を搬出する第2の搬送コンベヤ27と、進入する海苔束8を停止させるストッパ29と、海苔束8を叩いて整列する揃え板28と、進入してくる海苔束8を検知する進入センサ30を備えた整列装置と、第1の搬送コンベア9及び受け板10の停止動作及び始動動作の開始時間を計時する第1のタイマと第2の搬送コンベア27、ストッパ29及び揃え板28の停止動作及び始動動作の開始時間を計時する第2のタイマを備える。
(もっと読む)
1 - 20 / 41
[ Back to top ]