
Fターム[3E054GC01]の内容
包装位置への供給−物品の供給 (7,769) | 検知、制御(制御) (316) | 検知量自体を制御 (73)
Fターム[3E054GC01]に分類される特許
1 - 20 / 73
果実の容器詰め装置
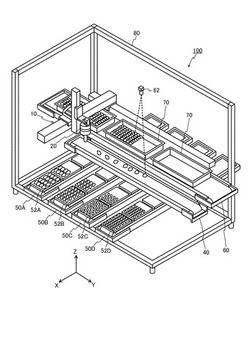
【課題】出荷パック内に見栄え良くイチゴを整列する。
【解決手段】制御部は、マシンビジョン62が取得した収穫箱70に収容されたイチゴの画像に基づいてイチゴの吸着位置を検出し、イチゴ搬送装置10に、収穫箱70に収容されたイチゴを吸着保持させるとともに、中継コンベア40上にイチゴを一旦載置させる処理と、マシンビジョンが取得した中継コンベアに載置されたイチゴの画像に基づいてイチゴの向き及び吸着位置を検出し、イチゴ搬送装置に、中継コンベアに載置されたイチゴを吸着位置にて吸着保持させるとともに、イチゴの向きに基づいて出荷パック52A〜52Dにイチゴを搬送させる処理とを実行させる。
(もっと読む)
果実保持装置

【課題】イチゴを吸着保持する際のイチゴの損傷を抑制する。
【解決手段】制御部が、吸着前画像取得部により取得されたイチゴの画像から、イチゴの向きと吸着位置とを検出し(ステップS10,S12)、移動部を介して、一端部にイチゴと接触する接触部を有する筒状の吸着管を移動して、接触部をイチゴの吸着位置に接近させ、接触部がイチゴの吸着位置に接触する前に、吸着管の内部を負圧にする負圧発生機構の動作を開始する(ステップS18)。これにより、イチゴの方が、イチゴが載置されている面(載置面)から離れて吸着管に吸い寄せられるようになる。
(もっと読む)
物品移載装置および物品移載方法
【課題】箱体への物品の投入時に、物品が箱体の外にこぼれ落ちることを防止できる物品移載装置および物品移載方法を提供する。
【解決手段】箱体17の収納容積の種別を箱センサ36,37により判別し、箱体17に既に収納されている物品16の体積を、箱体17の上方に位置した距離センサ35により検出されるデータにより求め、箱体17内の物品16の容積が箱体17の収納容積の一定の比率以上のとき、ベルト送り装置28によるベルト体27の送り出しが終了する前にチェーン駆動モータ24を駆動してチェーン23a,23bの移動を開始し、それに伴うベルト体27の一方の端辺部27aの周回を開始する。これにより、ベルト体27が箱体17内の一定の比率以上の物品16の上に載ることに起因して、ベルト体27に支持された物品16が箱体17の外部に放り出されることが回避される。
(もっと読む)
搬送装置
【課題】構造をシンプルにして小型化した搬送装置を提供する。
【解決手段】搬送装置10は、物品XA1を収容することができる複数のバケット19,20と、これらのバケット19,20を、水平方向に往復走行させる直動ロボット13,14と、バケット19,20を、鉛直方向に往復走行させるエアシリンダユニット15,16と、直動ロボット13,14およびエアシリンダユニット15,16を協働させて各バケット19,20を順次環状の移動軌跡上を循環させる制御部と、を備えている。
(もっと読む)
選果システム
【課題】表面が柔らかい青果物でも容易に箱詰めできる選果システムを提供する。
【解決手段】青果物6を載置した載置台5を上流側から下流側に搬送する主搬送手段が備えられ、主搬送手段には上流側から青果物6を載置台5上に載せる載置工程と、前記青果物6の品質を測定する品質計測工程と、前記品質計測工程の測定結果から等級や階級別に青果物6を選別してパック詰めするパック詰め工程とが設けられる選果システムにおいて、パック詰め工程は、主搬送手段の下流部で等級や階級別に分岐して搬送する複数の選別ライン30が設けられ、各選別ライン30の側方には、載置台5上に載置された青果物6のがく片側を吸着してパック48まで搬送し、整列させて吸着を解除してパック48内に詰めるパック詰めロボット33を備えるものとする。
(もっと読む)
物品分離装置
【課題】物品を連続して搬送しながら、物品を傷めることなく、後続の物品から分離させる物品分離装置を提供する。
【解決手段】物品を列をなした状態で搬送する搬送コンベヤ手段10と、先頭の物品に当接係合する係合部材51と、係合部材を移動させる係合部材駆動手段50と、隣接する物品同士間に進入そして脱出する分離部材31と、分離部材を移動させる分離部材駆動手段30を備え、係合部材駆動手段50が係合部材を先頭の物品P1の前面に当接した状態で前進せしめ、かかる状態で分離部材駆動手段30が分離部材を物品間に入り込ませて物品の搬送速度より遅い速度で前進移動させると共に、係合部材駆動手段50は、係合部材を先頭の物品P1の前面への当接を解除した後に、分離部材31が入り込んでいる物品P1,P2間に進入せしめ、分離部材31の移動速度より速い速度で係合部材を前進させて物品P1を前方へ押し出し、後続の物品P2から分離させる。
(もっと読む)
フィルムガイド装置及びPTP包装機
【課題】 包装機本体側の振動の影響を可及的に抑制し、容器フィルムのポケット部内に収納される錠剤等の検査を正しく行えるようにすること
【解決手段】 容器フィルム1の搬送路を構成するガイドレール21に設けられた開口部21a,21bに、第1,第2下側フィルムガイド板23,24を配置し、各下側フィルムガイド板をガイドレール21に対して防振ゴム30を介して支持する。下側フィルムガイド板は、容器フィルムの下面に接触してそれを支えるので、包装機側から伝わるガイドレールの振動は、下側フィルムガイド板にはそのまま伝わることはなく、容器フィルムひいてはポケット部内の錠剤が暴れるのが抑制される。下側フィルムガイド板の所定位置に設けた窓孔23b,23c,24b〜24dで露出するポケット部・錠剤をカメラ装置で撮像できる。
(もっと読む)
包装装置
【課題】粒状物が2本の原反間の所期の位置に挟み込まれるようにして包装することができるようにした包装装置を提供する。
【解決手段】粒状物を挟み込むための凹部11aが少なくとも一方のローラ11,12の外周面に設けられ、重なり合いつつある2本の原反1,2間に粒状物を案内するシュートパイプ20が一対のローラ11,12の上流側に配備されている。ローラ11,12に設けられた凹部11aを目掛けてシュートパイプ20から粒状物を噴出させる。粒状物を1個ずつ入れる窪み部61,61,…を外周面に複数設けた排出側の回転ドラム(第2のドラム)60がシュートパイプ20の上流端に配備されている。窪み部61,61,…に空気を噴射することにより、粒状物が窪み部61,61,…内からシュートパイプ20内に一定の間隔を空けて噴出する噴射手段64が備えられている。
(もっと読む)
横形製袋充填機における物品供給装置
【課題】饅頭等の軟質で表面が損傷し易い物品であっても、物品を損傷したり変形することなく製袋手段で成形されるフィルムの収容領域の幅中央に向けて供給する。
【解決手段】ベルトコンベヤ12が配設された移動フレーム28は、機枠26に対して上流側で回動軸30を介して水平回動可能に支持される。機枠26に配設した調節モータ36で作動される調節機構38が移動フレーム28に連繋される。ベルトコンベヤ12の搬送終端近傍に、ベルトコンベヤ12で搬送される物品10の左右方向の載置位置を検出する第1センサ42が配設される。制御手段は、ベルトコンベヤ12の基準位置に対する現在の回動角度と、第1センサ42で検出された物品10の載置位置との関係から調節モータ36を駆動制御し、ベルトコンベヤ12の搬送終端を、物品10を筒状フィルムFの収容領域の幅中央に送り込む位置に向けて変位させる。
(もっと読む)
PTPシート搬送装置
【課題】PTPシートの搬送時間を短縮できると共に、十分な受渡し時間を確保することのできるPTPシート搬送装置を提供する。
【解決手段】PTPシート搬送装置11は反転装置12を備え、反転装置12にはハウジング16の周囲に90度間隔で固定クランプ装置21Aと可動クランプ装置21Bとが1つおきに交互に設けられている。反転装置12は、可動クランプ装置21Bの回動軸18の傘歯車26と、ハウジング16の駆動軸14と同心で回転可能に設けられ、傘歯車26に噛合される傘歯車27と、傘歯車27の回転及び停止を駆動制御する駆動制御機構とを備えている。そして、受取り区間や第1受渡し区間等に可動クランプ装置21Bが在る場合においては、傘歯車27をハウジング16と同期して回転させることにより、可動クランプ装置21Bが回転軸18の軸線回りに回転しない構成となる。
(もっと読む)
複数の食製品の半重ね方法及び装置
【課題】扁平状な食製品を半重ねする方法及び装置を提供する。
【解決手段】食製品5を搬送する搬送コンベア7の搬送方向に長い一対の製品受け部材23を開閉自在に備えた製品受け装置19における前記一対の製品受け部材23を、前記搬送コンベア7における搬送方向の上流側へ相対的に移動し一対の製品受け部材23を閉動作して、当該一対の製品受け部材23の長手方向の受け入れ位置に、食製品5を受け入れて保持する。次に、前記一対の製品受け部材23の長手方向の前記受け入れ位置よりも上流側の所定位置に対応する下方位置に、前記次の食製品5が達したときに、前記一対の製品受け部材23を開動作して、保持していた食製品5を前記次の食製品5に重ねる。そして、前記次の食製品5が前記受け入れ位置に対応したときに、前記一対の製品受け部材23を閉動作して重ねた状態の食製品5を受け入れて保持することを、複数回繰り返す。
(もっと読む)
食品整列供給システム
【課題】簡単な構造で、食品を搬送しつつその厚さ方向を横に向けて縦横に複数列をなすように整列した食品群として包装装置に供給することのできる食品整列供給システムを提供する。
【解決手段】伏姿勢で載置される多数の食品Fを複数の列に整列して供給搬送する整列搬送装置2と、送り出されてくる各列の食品Fを単列ずつに区分するとともに、搬送しつつ起立姿勢にして送り出す姿勢変更搬送装置3と、送り出されてくる各列の食品Fを列を保持した状態で中間搬送するとともに搬送方向後端で各列の間隔が狭くなるように寄せる中間搬送装置4と、送り出されてくる各列の起立姿勢の食品Fを各列について1個ずつの横方向に並んだ食品群FGとして送り出すグループ形成装置5と、グループ形成装置5から送り出されてくる食品群FGを排出搬送する排出搬送装置6と、制御部7とを設ける。
(もっと読む)
長尺農作物の方向修正搬送装置
【課題】長尺農作物の方向修正搬送のオートメーション化。
【解決手段】長手方向の一端側の向きが搬送方向下流側方向でないと識別された長尺農作物Aを、この長尺農作物Aの一端側の向きを搬送方向下流側方向に向かせるように修正しながら、コンベア3Bの搬送方向と交差する方向を搬送方向とするシュータ6に送り出し、長手方向の一端側の向きが搬送方向下流側方向であると識別された長尺農作物Aを、その向きを保った状態でシュータ6に送り出すようにし、このシュータ6は、向きが修正されて送り出される長尺農作物Aを、その向きを保った状態で搬送する。
(もっと読む)
物品把持装置
【課題】 複数の物品を把持する物品把持装置において、それらの物品の組合せの変更に簡易に対応でき、各物品の包装体に対する容積比を高くし得るようにそれらの物品を把持すること。
【解決手段】 主物品1を把持する第1把持手段40と、第1把持手段40により把持された主物品1の側部との間にサブ物品2を挟んで把持する第2把持手段50とを有する物品把持装置30であって、前記第2把持手段50は、第1把持手段40により把持されて相隣る2個の主物品1の側部によって形成される凹状部に、該主物品1の側部の形状に倣うサブ物品2を挟み付けるもの。
(もっと読む)
箱詰装置
【課題】起立姿勢の物品群の箱詰を可能にする箱詰装置を提供する。
【解決手段】箱詰装置は、包材からなる物品Bが隣接する物品と一部分が重なり合った状態で載置された物品群Cを位置Pまで搬送する搬送コンベア316R及び316Lと、所定位置Pにおいて物品群Cを起立姿勢にする立上部と、該起立姿勢となった物品群Cを所定位置Pから物品群Cが収容される段ボール箱まで移送するキャッチャ410とを備える。
(もっと読む)
箱詰め装置
【課題】 物品の箱詰めを高速に行うことができ、箱に投下した物品の姿勢が乱れるのを防止することができる箱詰め装置を提供すること。
【解決手段】 第3及び第4の羽根車21、22の下方の所定位置に一時保持装置40を設け、一時保持装置40は、受け取り角度位置において投下装置20から投下された複数の物品を受け取って、減速しながら停止角度位置に停止し、その後、複数の物品を箱に落下させる。
(もっと読む)
箱詰め装置
【課題】製品を把持した後、旋回させることなく上下動させるのみで箱内への投入を行うことにより、製品の旋回に要する機構・工程を省略して簡素化し、製造コストを低減し、スペースを削減し、箱内への投入速度を向上する箱詰め装置を提供する。
【解決手段】無端のテーブルコンベヤ4,5は、同じ循環経路を構成するように揃えられているとともに各々が別々のサーボモータで駆動される。テーブルコンベヤ4,5は、供給コンベヤから順次供給される製品が移載されてサシミ状又は平置き状に集合される集合テーブル11,15を有しており、集合テーブル11,15が互いに重なることなくずれた状態で駆動される。投入装置50は、集合された製品群を一括把持する把持装置を備えており、集合テーブル11,15が次の集合のために移動した後、空いた空間を通じて下方に駆動され、把持した製品を直下に配置されている段ボール箱に投入する。
(もっと読む)
箱詰め装置
【課題】 物品の箱詰めを高速に行うことができる箱詰め装置を提供すること。
【解決手段】 一時保持装置40は、箱検知器66が箱詰め位置Pに箱が位置したことを検知しない限り、第3及び第4の羽根車41、42のある一対の羽根上に投下装置20から投下された物品を受け取って保持し、箱検知器66が箱詰め位置Pに箱が位置したことを検知すると、該第3及び第4の羽根車41、42のある一対の羽根上に保持した物品を投下するよう構成されている。
(もっと読む)
箱詰装置
【課題】包装物の厚みが変化した場合であっても、安定して包装物を一部重ねて搬送し、箱詰することができる箱詰装置を提供することである。
【解決手段】本発明に係る箱詰装置100においては、シールチェッカ700により包装物110の厚みが検出され、第1搬送部200により包装物110が搬送される。第2搬送装置400に集積部AR1が設けられ、集積部AR1において重ねあわされた包装物110が第2搬送装置400により搬送される。制御部301は、シールチェッカ700からの包装物110の厚みに基づいて第2搬送装置400の移動を調整する。
(もっと読む)
物品搬送装置
【課題】グルーピングされる物品以外の圧力を受けずに、物品をグルーピングできる物品搬送装置の提供を目的とする。
【解決手段】複数列に配列され、かつ搬送方向に連続して供給されるペットボトルPBを搬送する供給部2と、供給部2で搬送されるペットボトルPBが順次移送され、所定個数のペットボトルPBの搬送方向の間隔を狭めるとともに、列と直交する方向である行方向に沿って各列のペットボトルPBを整列させるグルーピング部3とを備える。グルーピング部3は、一つのペットボトルPBを載せて搬送する、独立して速度調整が可能な複数の搬送台車LMでペットボトルPBを搬送するので、グルーピングされるペットボトルPBからの圧力さえ受けることなくペットボトルPBをグルーピングできる。
(もっと読む)
1 - 20 / 73
[ Back to top ]