
Fターム[3F022AA15]の内容
Fターム[3F022AA15]に分類される特許
1 - 20 / 669
電路システム用の導体
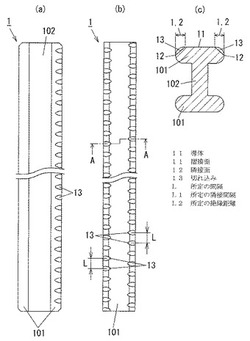
【課題】集電子と導体の摺接によるバリの発生が抑制され、且つ、摩耗や振動が増大するのが抑制される集電システム用の導体を提供する。
【解決手段】走行体の走行経路に沿って複数の導体1が所定の隣接間隔をあけて並設され、集電子を導体1に摺接させながら走行体が走行して導体より集電を行う電路システムの導体1である。集電子と摺接する摺接面11と、摺接面11に隣接する隣接面12とを有し、摺接面11と隣接面12との境界となる部分に、走行体の走行方向に所定の間隔Lをあけて複数の切れ込み13が形成される。複数の切れ込み13の所定の間隔Lは、所定の隣接間隔から所定の絶縁距離L2を減じた値の半分よりも小さい。
(もっと読む)
物品仕分設備の物品入出庫方法

【課題】多数種類の物品を扱うようにしながらも、小型化を図ることができる物品仕分設備の物品入出庫方法を提供する。
【解決手段】複数種類の物品を保管する物品保管部と、物品仕分情報に基づいて、保管用収納器から物品を取出して集約用容器に投入する物品投入処理を行う物品仕分処理部とを備える物品仕分設備が設けられ、物品仕分情報に基づいて、物品保管部からパレットを順次出庫し、かつ、出庫したパレットから保管用収納器を取出して物品仕分処理部に搬送する収納器搬送処理、及び、パレットから取出した保管用収納器のうちで、物品投入処理に用いないため物品仕分処理部に搬送しない保管用収納器を、異なる種類の物品を収納する保管用収納器が一つのパレットに載置される混載状態となる形態で、パレットに積層して物品保管部に保管する収納器保管処理を行う。
(もっと読む)
物品投入設備
【課題】投入装置による集品容器に対する投入が失敗した物品の紛失を防止する。
【解決手段】物品13の出し入れが可能な上方開放部を有する集品容器12を搬送路に沿って搬送する搬送装置14と、搬送装置14の上方に設置され、搬送装置14上を搬送される集品容器12に対して、上方から物品13の落下投入を行う投入装置15と、搬送装置14と投入装置15との間に存在する搬送空間16の外側へ物品13が脱落することを防止するカバー20を設けた。
(もっと読む)
宅配支援システム
【課題】配送人や配送車の配送時間効率が上がり、燃料費の節約も可能となる宅配支援システムを提供する。
【解決手段】配送事業者が宅配支援サービスを受けようとする顧客から、インターネット等を介して取得した顧客情報から荷物ロッカーに貼る顧客認証RFIDタグと、管理ボックスに装填する顧客情報記録媒体を作成し、配送人の携帯する管理ボックスを顧客の管理する荷物ロッカーに装着することで顧客認証を行い、認証可の場合には通電され電気錠を解除し荷物の出し入れをする。荷物ロッカーには前記電気錠と顧客が解施錠するためのシリンダ錠の2系統を備え、電気錠のノッチとシリンダ錠のレバーを噛みあわせることで、どちらか一方の解錠で扉が開く状態となり、どちらか一方の施錠で扉が開かない状態の構成としているため顧客はシリンダ錠の操作で荷物の出し入れができる。
(もっと読む)
搬送車
【課題】搬送車において、ケーブルチェーンを配置しても搬送車の走行方向の長さの増加を抑える。
【解決手段】搬送車は、左右Y方向に走行する。搬送車3は、車体と、移載装置とケーブルチェーン31と第1ケーブルチェーン支持部33と第2ケーブルチェーン支持部35とを備える。車体は、左右Y方向に走行可能である。移載装置は、車体に設けられ、左右Y方向に移動する。ケーブルチェーン31は、車体に一端31bが固定され、他端31cが移載装置に固定される。第1ケーブルチェーン支持部33は、車体側のケーブルチェーン31の固定部分から連続し、移載装置の移動範囲より外側に向かって下方に傾斜する。第2ケーブルチェーン支持部35は、第1ケーブルチェーン支持部33よりケーブルチェーン31の可動曲率に応じた距離以上離して配置され、移載装置の移動範囲より外側に向かって下方に傾斜する。
(もっと読む)
ロボット仕分けシステム及び仕分け済み物品の製造方法
【課題】既存の設備で、被仕分け物品に関する仕分けパラメータの変動に柔軟に対応して仕分けを行うことができるようにする。
【解決手段】ロボット仕分けシステム1は、搬入側カーゴ9と、搬出側カーゴ10A〜10Fと、アーム24、吸着パッド25、レーザセンサ26、ビジョンセンサ27を有するロボット11と、ロボットコントローラ14を有しており、レーザセンサ26で搬入側カーゴ9に載置された複数の荷物4それぞれの上面までの距離情報を取得し、上面が最も高い位置にある荷物4を特定し、ビジョンセンサ27で上記特定された特定の荷物4の外形情報を取得すると共に特定の荷物4の仕向地情報の取得を図り、特定の荷物4の形状及び大きさを算出し、特定の荷物4に対応した特定の仕向地区域を決定し、特定の荷物4を吸着パッド25で持ち上げつつ特定の仕向地区域に対応した特定の搬出側カーゴ10へ積み付けるように、ロボット11の動作を制御する。
(もっと読む)
ラックサービングユニットおよびオーダピッキング倉庫
【課題】複数の物品が一度に取り扱われている場合でも積載装置を用いずに物品を取り扱うためのラックサービングユニットまたはオーダピッキング倉庫を提供する
【解決手段】積荷ピックアップ装置Mと、物品Cの下で把持するための物品用の台13を含む少なくとも1つの実質的に水平方向に伸縮する物品輸送グリッパTと、を備える、開放箱底3を有する収納箱2用のラックサービングユニットGに、物品輸送グリッパTとして働きかつ全く不安定な位置にある物品Cの下で把持するための物品用の台13と入れ子式フランクFとを有する単一の入れ子式グリッパピン、及び/又は、把持された物品Cの安定した輸送位置を設定するための押さえ装置Nが設けられる。
(もっと読む)
入荷情報記録システム、入荷情報記録方法、及びプログラム
【課題】安価な設備投資で、入荷した物品のデータを迅速に記録できる入荷情報記録システムを提供する。
【解決手段】入荷情報記録システムは、入荷拠点ごとに独立して設けられるデータベース6と、入荷拠点に入荷される物品を特定する符号および該物品の数量のデータを含むバーコードBを印刷する印刷部と、入荷拠点に入荷された物品に添付されたバーコードBから、入荷拠点に入荷された物品を特定する符号および該物品の数量のデータを抽出する物品データ抽出部61と、物品データ抽出部61が抽出したデータを、物品が入荷された入荷拠点に設けられるデータベース6に記録する入荷履歴データ記録部63とを備える。
(もっと読む)
部品管理システム
【課題】部品の保管位置に対応して照射位置を変更できる部品管理システムを提供すること。
【解決手段】複数部品Sを保管し、入出庫をするための部品管理システム1であって、複数部品Sを保管するための棚11,12が設けられた保管棚10と、保管棚10に保管された部品Sを取り出す側と対向する位置に設けられ、部品Sの保管位置を指し示すためにレーザ照射位置Pを変更可能なレーザポインタ20と、部品SのID情報および保管位置情報を入力する入力手段30と、部品SのID情報と保管位置情報との対応関係を記憶する保管位置記憶部52を有し、レーザポインタ20のレーザ照射位置Pを制御する制御手段50とを備え、部品出庫時にオペレータが入力手段30に出庫する部品SのID情報を入力すると、制御手段50は、該対応関係に基づいてレーザポインタ20のレーザ照射位置Pを当該部品Sの保管位置に制御する。
(もっと読む)
ロボット仕分けシステム、ロボット装置、及び仕分け済み物品の製造方法
【課題】作業者の労力負担を低減しつつ信頼性を向上できるようにする。
【解決手段】ロボット仕分けシステム1は、搬入側カーゴ9と、搬出側カーゴ10A〜10Fと、アーム24、吸着パッド25、レーザセンサ26、及びビジョンセンサ27を有するロボット11と、ロボットコントローラ14とを有しており、レーザセンサ26により搬入側カーゴ9に載置された複数の荷物4それぞれの上面までの距離情報を取得し、上面が最も高い位置に存在する荷物4を特定し、ビジョンセンサ27により上記特定された特定の荷物4の外形情報を取得すると共に特定の荷物4の仕向地情報の取得を図り、特定の荷物4の形状及び大きさを算出し、特定の荷物4に対応した特定の仕向地区域を決定し、特定の荷物4を吸着パッド25により持ち上げつつ特定の仕向地区域に対応した特定の搬出側カーゴ10へ積み付けるように、ロボット11の動作を制御する。
(もっと読む)
ピッキングシステム
【課題】ピッキングシステムにおいて、ヒューマンエラーの低減と効率の向上を図る。
【解決手段】同一種類の複数の物品が収容される箱体200であって複数種類の物品に対応する複数の箱体200からオーダー情報に基づき複数の物品を組み合わせて出庫するピッキングシステム100であって、箱体200を保管する保管棚101と、箱体200を保持する保持部が複数箇所に設けられる移動棚102と、保管棚101と移動棚102との間で箱体200を移載する第一移載装置103と、組み合わせ作業を行う組み合わせエリアAと移動棚102に箱体200が移載される移載エリアBとの間で移動棚102を移載する第二移載装置104と、組み合わせエリアAにおいて、組み合わせに必要な組み合わせ情報を移動棚102に保持される箱体200に対応して報知する報知装置105とを備える。
(もっと読む)
在庫管理および盗難防止の警報用タグ・システムおよび警報用タグ方法
【課題】前後のユニークなイベント・シーケンスに関連するイベントの追跡および分析を行うために用いるユニークな繰り返しのシーケンス・イベントを発生させるために、RFチップおよびRFIDインレーが備わった警報用のRFIDタグのオープン動作およびクローズ動作を監視可能な在庫管理および/または盗難防止の警報用のタグ・システムを提案すること。
【解決手段】在庫管理および盗難防止用警報のためにRFID技術を利用したタグ・システムである。このシステム20は、リアルタイムに、あるいはスキャン時に、ロック/ロック解除のイベントのそれぞれについての時刻および日付と、これらのイベントのシーケンスをモニターすることで、在庫および盗難の管理を行う。
(もっと読む)
移動駆動ユニットを操るシステムおよび方法
【課題】移動駆動ユニットを操るシステムおよび方法を提供する。
【解決手段】目録品ホルダーを回転させる方法は、目録品ホルダーを、経路の直線セグメントに沿って、目録品ホルダーの第一の面を第一の方向に向けつつ回転領域に向けて動かすことを含む。回転領域は目録品ホルダーの回転のために指定された作業スペースの一部分を含む。本方法はさらに、目録品ホルダーを、第一の弧状のセグメントに沿って、前記第一の面を前記第一の弧状のセグメントに垂直にした配向で、回転領域中に動かすことを含む。本方法はさらに、回転領域内における回転機動を実行し、目録品ホルダーを、第二の弧状のセグメントに沿って、第二の面を前記第一の方向に向けつつ、回転領域の外に動かすことを含む。
(もっと読む)
荷物配置管理方法、運搬装置および運搬制御プログラム
【課題】荷物の配置を正確に管理する。
【解決手段】運搬装置が、第一の荷物を、該第一の荷物に貼付されたタグが保持する情報に基づいて特定される、複数の荷物列のうちの一の荷物列の端部に配置する際に、該荷物列の端部に配置されていた第二の荷物に貼付されたタグが保持する情報を、前記第一の荷物に貼付されたタグに追記する。
(もっと読む)
物品搬送設備
【課題】物品が搬送元に長い間待機していることを認識することができ、物品の搬送効率の改善を図ることができる物品搬送設備を提供する。
【解決手段】供給装置にて物品が搬送元に搬送されたことを検出する第1検出手段の検出情報及び物品が搬送元から搬送されたことを検出する第2検出手段の検出情報に基づいて、供給装置にて物品が搬送元に搬送されてから物品搬送手段にて搬送元から搬送されるまでの時間を計時して待機時間として記憶する時間管理手段と、時間管理手段に記憶されている情報に基づいて、待機時間を示す情報を表示手段に表示させる表示制御手段とを設ける。
(もっと読む)
物品搬送設備
【課題】物品が集中する搬送経路を判別して物品の搬送効率の改善を図ることができる物品搬送設備を提供する。
【解決手段】複数の搬送元と複数の搬送先との組み合わせに対応する複数の搬送経路の夫々について、物品が搬送された搬送回数を計数して記憶し、その記憶されている情報に基づいて、複数の搬送経路の夫々についての搬送回数を示す情報を表示手段に表示させる。
(もっと読む)
物品処理設備
【課題】作業箇所で人為作業をする作業者が作業予定を把握できる物品処理設備を提供すること。
【解決手段】搬送元から搬送先としての作業箇所に搬送する複数の搬送対象の物品の夫々を識別する識別情報、及び、搬送対象の物品ごとに割り付けられた搬送先情報を含む搬送データを管理する管理制御手段が、物品搬送装置にて搬送対象の物品が作業箇所に搬送されるに伴って、物品搬送装置の作動を制御する搬送制御手段から通信される搬送完了情報に基づいて、搬送対象となる物品のうち、作業箇所に未だ搬送されていない未搬送物品の個数である未搬送個数を、当該未搬送物品についての搬送データの数により管理するように構成され、管理制御手段が管理する未搬送個数を表示手段の未搬送個数表示部分Jに表示させる表示制御手段が設けられている物品処理設備。
(もっと読む)
自動倉庫
【課題】 倉庫内でピッキングができ、しかも一括して出庫する等の制約がない自動倉庫を提供する。
【構成】 自動倉庫は、複数の物品を正面から出し入れ自在なキャリアと、キャリアを複数個載置自在なラックと、入出庫用のステーションと、キャリア内の任意の物品及びキャリアのいずれも移載自在な移載装置を備え、ラックとステーションとの間でキャリアまたは物品を搬送する搬送装置とを備えている。
(もっと読む)
移動駆動ユニットを位置させるシステムおよび方法
【課題】目録品を移送する方法を提供する。
【解決手段】目録品を移送する方法が、移動駆動ユニットの割り当て状態を判定することを含む。本方法はまた、前記移動駆動ユニットが現在、タスクを完了させつつあるのではないと判定するのに応答して、前記移動駆動ユニットの前記割り当て状態に基づいて前記移動駆動ユニットについてある位置を選択することも含む。本方法はさらに、選択された位置を同定する情報を前記移動駆動ユニットに送信することを含む。
(もっと読む)
ピッキングシステム
【課題】ピッキング作業性の向上を図ることができるピッキングシステムを提供する。
【解決手段】ピッキングシステムは、間口を有する複数のゾーンで構成した収納棚手段と、間口から商品をピッキングする複数の作業者が並んで位置する作業者用スペースとを備える。複数のゾーンに対して1人の作業者を担当として設定することが可能である。1人の作業者が担当する複数のゾーンに関する各ゾーン別のピッキング作業数割合を設定することが可能である。
(もっと読む)
1 - 20 / 669
[ Back to top ]