
Fターム[3F022LL38]の内容
Fターム[3F022LL38]に分類される特許
1 - 20 / 42
ロボット仕分けシステム、ロボット装置、及び仕分け済み物品の製造方法
【課題】作業者の労力負担を低減しつつ信頼性を向上できるようにする。
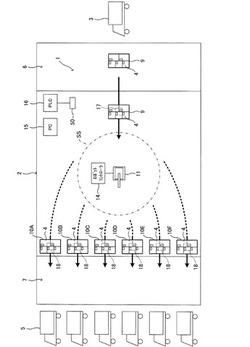
【解決手段】ロボット仕分けシステム1は、搬入側カーゴ9と、搬出側カーゴ10A〜10Fと、アーム24、吸着パッド25、レーザセンサ26、及びビジョンセンサ27を有するロボット11と、ロボットコントローラ14とを有しており、レーザセンサ26により搬入側カーゴ9に載置された複数の荷物4それぞれの上面までの距離情報を取得し、上面が最も高い位置に存在する荷物4を特定し、ビジョンセンサ27により上記特定された特定の荷物4の外形情報を取得すると共に特定の荷物4の仕向地情報の取得を図り、特定の荷物4の形状及び大きさを算出し、特定の荷物4に対応した特定の仕向地区域を決定し、特定の荷物4を吸着パッド25により持ち上げつつ特定の仕向地区域に対応した特定の搬出側カーゴ10へ積み付けるように、ロボット11の動作を制御する。
(もっと読む)
ロボット仕分けシステム及び仕分け済み物品の製造方法

【課題】既存の設備で、被仕分け物品に関する仕分けパラメータの変動に柔軟に対応して仕分けを行うことができるようにする。
【解決手段】ロボット仕分けシステム1は、搬入側カーゴ9と、搬出側カーゴ10A〜10Fと、アーム24、吸着パッド25、レーザセンサ26、ビジョンセンサ27を有するロボット11と、ロボットコントローラ14を有しており、レーザセンサ26で搬入側カーゴ9に載置された複数の荷物4それぞれの上面までの距離情報を取得し、上面が最も高い位置にある荷物4を特定し、ビジョンセンサ27で上記特定された特定の荷物4の外形情報を取得すると共に特定の荷物4の仕向地情報の取得を図り、特定の荷物4の形状及び大きさを算出し、特定の荷物4に対応した特定の仕向地区域を決定し、特定の荷物4を吸着パッド25で持ち上げつつ特定の仕向地区域に対応した特定の搬出側カーゴ10へ積み付けるように、ロボット11の動作を制御する。
(もっと読む)
物品保管設備及び物品保管設備における物品積付け方法
【課題】パレットとして、設定上限重量で物品を積み付けて収納部に収納した際の下方側の撓み量が、許容限度内となるパレットと、許容限度を超えるパレットとを使用しながらも、保管棚の収納効率の低下を抑制することができる物品保管設備を提供する。
【解決手段】物品BをパレットPに段積み状態に積み付ける積付け部Dが、難撓みパレットに物品を積み付けるときには、設定上限高さ以下でかつ設定上限重量以下となる設定許容条件にて物品を積付け、かつ、易撓みパレットに物品を積み付けるときには、設定上限高さ以下でかつ設定上限重量よりも低くなるように定めた易撓みパレット用上限重量以下となる易撓みパレット用設定許容条件にて、物品を積み付けるように構成されている。
(もっと読む)
物品保管設備及び物品保管設備における物品積付け方法
【課題】パレットとして、設定上限重量で物品を積み付けて収納部に収納した際の下方側の撓み量が、許容限度内となるパレットと、許容限度を超えるパレットとを使用しながらも、保管棚の収納効率の低下を抑制することができる物品保管設備を提供する。
【解決手段】制御手段が、撓み量が許容限度を超えるパレットを収納するときには、収納部Sのうちの空き状態の収納部のうちで、下方の収納部に物品が収納されていない収納部、又は、下方の収納部に物品が収納されている収納部であって、下方の収納部に収納されている物品Bの高さと収納対象のパレットの撓み量とに基づいて、収納対象のパレットを収納するときに、降ろし用目標高さの物品載置体8が下方の収納部に収納されている物品の上面から設定融通距離を離れることが予測される収納部を、収納対象の収納部として選択するように構成されている。
(もっと読む)
物品保管設備
【課題】パレットとして、設定上限重量で物品を積み付けて収納部に収納した際の下方側の撓み量が許容限度内となるパレットと、許容限度を超えるパレットとを使用しながらも、保管棚の収納効率の低下を抑制することができる物品保管設備を提供する。
【解決手段】収納部Sとして、下方側への撓み量が許容限度内のパレットPを収納するための標準収納部SHと、下方側への撓み量が許容限度を超えるパレットPを収納するための補助収納部SSとが設けられ、制御手段が、撓み量が許容限度内のパレットPを収納することが指令された場合には、標準収納部SHにパレットPを収納し、かつ、下方側への撓み量が許容限度を超えるパレットPを収納することが指令された場合には、補助収納部SSにパレットPを収納するように構成されている。
(もっと読む)
荷姿認識装置
【課題】自動車の組立部品の納入等の物流工程において、パレット上に積載された箱体の種類、形状、寸法及び位置等の荷姿情報を自動的に認識する荷姿認識装置を提供する。
【解決手段】走査装置7の可動ラインカメラ8及び固定ラインカメラ10により、パレット2上に積載された箱体3の第1面〜第4面W1、W2、L1、L2について走査する。走査データから、箱体3に貼り付けられた帳票4の2次元コードを抽出し、2次元コードの位置を表す座標データを生成し、また、抽出した2次元コードに基づきデータベースから箱体3の形状、寸法及び2次元コードの表示位置を含む箱体情報を取得し、2次元コードの位置を表す座標データ及び箱体情報に基づき、パレット2上に積載された箱体3の荷姿情報として、箱体3の各部の座標データを生成する。
(もっと読む)
カセットストッカ
【課題】スタッカクレーン走行時においても側方へ押し退けられる塵埃を含んだ空気流がポートエリア内に流れ込まないようにしてカセットを汚染することなく高速で搬送できるようにしたカセットストッカを提供すること。
【解決手段】スタッカクレーンエリアSaを走行するスタッカクレーンKの走行台車側部位置で、かつポートエリアSb下方位置にスタッカクレーンエリアSa下部と互いに導通するようにして、スタッカクレーンKの走行時に発生した塵埃をダウンフローと一緒に吸収するようにしたエアーチャンバCを、スタッカクレーンKの走行方向に沿って設置する。
(もっと読む)
ピッキング設備およびピッキング方法
【課題】1本の搬送経路と棚設備で冷凍物と冷凍物以外の物品の集品を行うことができ、また専用保冷バックを有効に使用できるピッキング設備を提供することを目的とする。
【解決手段】冷凍物に区分される商品22を集品する冷凍用容器21Bと冷凍物以外の商品22を集品する通常用容器21Aをともに、同一の集品ライン31A,31Bにより搬送しながら集品作業を実行するピッキングエリア13と、集品が終了すると集品ライン31A,31Bより冷凍用容器21Bを分岐し、出荷先で特定される冷凍用容器21B毎に集品された冷凍物を冷凍物搬送用容器26に移し替える移載エリア14を備える。この構成により、冷凍物と冷凍物以外の商品の集品作業を同一搬送ラインにより実行でき、商品22を区分別に集品する搬送ラインを不要にでき、また冷凍物を専用の冷凍物搬送用容器26に移し替えることにより、出荷後に解凍して品質が落ちることを回避できる。
(もっと読む)
投入ガイド装着装置及び装着方法
【課題】物品投入時の物品の落下を防ぐ投入ガイド3を容器2に迅速かつ確実に装着することができる、投入ガイドの装着装置4と装着方法を提供すること。
【解決手段】コンベヤ1で複数の容器2を搬送しながら各容器2内へ物品を投入する物品投入装置の搬送上流側に配設された投入ガイド装着装置4において、容器2を搬送路上の所定位置に位置決めする位置決め手段41と、投入ガイド3を位置決め手段41の上方に待機させる待機手段42と、上昇位置において待機手段42で待機する投入ガイド3を保持し、下降位置において投入ガイド3の保持を解除して投入ガイド3を位置決め手段41で位置決めした容器2に装着する装着手段43とを設けた。
(もっと読む)
収納ラック
【課題】工具/物品の出し入れに要する空間を縮小する収納ラックを開示する。
【解決手段】複数の棚1aを有する少なくとも1つのラックモジュール1であって、水平方向に挿入可能な収納手段2を各棚1aに割り当てることが可能であり、各収納手段2が物品Wを安全に並べるための少なくとも1つの物品収納部を備えた、ラックモジュール1と、前記ラックモジュール1の棚1aから取り出された収納手段2を受け取るため及び前記収納手段2を垂直方向に移動させるための昇降装置4と、前記物品Wの前記収納手段2からの受け取り及びこれへの引き渡し並びに前記物品Wの更なる取り扱いのための移送装置3と、を備えている。
(もっと読む)
顧客注文を満たす処方箋の薬を出す方法
顧客注文の処方薬を調剤する方法。各製品(12)は、含まれる医薬品に関する情報を含む製品バーコード(24)によって印がつけられている。機械(10)に積み込む前に、各製品(12)には、顧客注文の患者の処方箋に関する印が不要である。方法は、機械(10)に積み込まれる各製品(12)の製品バーコード(24)を読み取るために機械(10)を使用するステップを含む。各製品(12)の製品バーコード(24)の読み取りに応じて、少なくともいくつかの製品(12)は、処方箋それぞれ1つに関する患者ラベル(32)に患者バーコード(34)などの情報のラベルが貼付される。 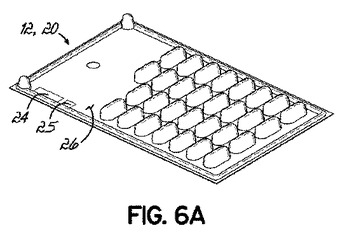 (もっと読む)
(もっと読む)
物品搬送設備
【課題】作業者が物品搬送体に接触することを未然に防止できる物品搬送設備を提供する。
【解決手段】荷受台Dの設置箇所よりも物品出し入れ口15から離れた箇所において作業者の存在を検出して、非監視領域Nから監視領域Eへの作業者の進入を検出する進入検出手段Kを設け、制御手段を、物品搬送体1と荷受台Dとの間で物品を移載するときは侵入防止用開閉扉16を開放状態とし、進入検出手段Kにて非監視領域Nから監視領域Eに作業者が進入したことが検出されるに伴って侵入防止用開閉扉16を閉鎖状態とするべく、侵入防止用開閉扉16の開閉作動を制御するように構成する。
(もっと読む)
物品搬送設備
【課題】閉鎖体の設置コストを抑えることができながら閉鎖体を設置しても荷受台を物品搬送体の近くに設置できる物品搬送設備を提供する。
【解決手段】走行経路に沿って走行して複数の荷受台Dの間で物品を搬送する物品搬送体1と、走行経路とその外部とを仕切る状態で設置され、且つ、物品搬送体1にて荷受台Dとの間で物品を移載するための物品出し入れ口15を備えた侵入防止体14と、物品出し入れ口15を閉鎖する閉鎖位置と物品出し入れ口15を開放する開放位置とに移動自在な閉鎖体23と、閉鎖体23を移動操作する移動操作手段24とを備え、閉鎖体23を、走行経路の長手方向に沿って移動自在に構成し、移動操作手段24を、閉鎖体23の下端部を支持して閉鎖体を閉鎖位置と開放位置とに移動操作するべく床面上に設ける。
(もっと読む)
バッファカセット
【課題】大型の、ガラス基板及び工程途中のガラス基板を一時的に収納、保管するための、ロボットによるランダムアクセス可能で、且つ、収納効率の高いバッファカセットを提供する。
【解決手段】後壁部材と両側壁部材の内側の多段の収納部のそれぞれが、両側壁部材に片側が拘持されて内側方向に相対向して張り出し、先端部が離間して配置された複数本の上部に所定の間隔で設けられた支持ピンを有する側壁側の支持フレームと、後壁部材に片側が拘持されて前記側壁側の支持フレームの離間部に張り出した複数本の上部に所定の間隔で設けられた支持ピンを有する後壁側の支持フレームとを有し、それぞれの前記支持フレームの先端部と前記側壁部材及び前記後壁部材のそれぞれの拘持部との間に金属ワイヤーが張架されていて、前記基板支持フレームの先端部が基板質量による下側への撓みに対抗する張力を受けながらガラス基板を担持する構造を有する。
(もっと読む)
バラ品の仕分けパレット詰め合わせ方法
【課題】 ピッキングロボットの稼働率の向上と設備の省スペース化を図る。
【解決手段】 同一品種の物品を複数収容した単品パレットを単品パレット搬送コンベヤで同一品種が連続するようにピッキングゾーンへ供給し、仕分け先別の仕分けパレットを仕分けパレット搬送コンベヤでピッキングゾーンへ供給し、ピッキングロボットで単品パレットから物品を取り出して仕分けパレットへ投入し、その仕分けパレットにその品種の物品投入が完了すると送出コンベヤで送り出し、送出コンベヤ上の仕分けパレットが詰め合わせ未完の場合は保管部で一時保管し、詰め合わせ完了の場合は搬出し、単品パレットが空になると搬出して次の単品パレットを供給し、次品種の単品パレットが供給されると保管部の仕分けパレットを再送込みコンベヤでピッキングゾーンへ戻し、これらの工程を全仕分け先に物品が仕分けられるまで繰り返す。
(もっと読む)
搬送制御装置及び搬送制御方法
【課題】被搬送物の搬送先の負荷が高くなった場合にも、処理装置の総体としてのタクトタイムの短縮を図り、また、枚葉搬送ラインにおいても、演算処理を要するデータ量を増大させず、大掛かりな演算処理装置が不要で、演算処理時間が長くならない搬送制御装置を提供する。
【解決手段】処理設備の各搬送装置を制御する制御手段2は、上位システムから仕分け条件を受信し、この仕分け条件に基づいて仕分け情報を生成し、生産ロットが開始済みであるかを判別し、開始済みであれば、処理設備の被搬送物の搬出ポートのうち、空の搬出ポートがあるか否かを判別し、生産ロットが完了済みであるかを判別し、優先度の高い仕分け条件があるかを判別し、生産ロットが完了済みであり、空の搬出ポートがあれば、優先度の高い仕分け条件にしたがって、搬出ポートに仕分け情報を割付け、この仕分け情報にしたがって、搬送装置3−1,3−2,・・・3−nを制御する。
(もっと読む)
物品移載用ロボット装置
【課題】 簡易な方法で物品に打痕などを生じさせず、均一かつ効率的な積付けを可能とする物品移載用ロボット装置を提供する。
【解決手段】物品受渡ステーション3において、物品供給手段4から受取った物品Wを、所定の積込み容器に積付ける物品移載用ロボット装置2であって、ロボットベース部20と、ロボットベース部20に回動自在に連結された多関節ロボットアーム部21と、ロボットアーム部21の先端に回動自在に連結されたロボットハンド部23とを含み、ロボットハンド部23は、バケット保持部8と、物品を収容するためのバケット部9からなり、バケット部9は、バケット保持部8に対して傾動可能に保持され、かつ角度調整駆動部12によって傾き角度の調整が可能とされる。
(もっと読む)
ピッキング装置と方法
【課題】物品の高さ方向位置をほとんど考慮することなく、最上段物品を取り出すことができ、これにより、安定してかつ短時間で物品を取り出すことができるようにする。
【解決手段】台3に積載された物品1を台3から取り出すピッキング装置10であって、台3には物品1が上下複数段に積まれており、上下複数段の物品1のうち最上段にある最上段物品1の高さが、所定の物品取出高さHに位置しているかを検出する高さ検出器5と、台3を昇降させ、台3の昇降中に最上段物品1の高さが物品取出高さHに位置することを高さ検出器5が検知すると、台3の昇降を停止する昇降装置7と、物品取出高さHに位置する最上段物品1を台3から取り出す取出装置9と、を備える。
(もっと読む)
創薬用自動保管庫に用いられる棚位置自動ティーチング装置
【課題】人手による作業を減らし、保管棚のX座標、Y座標、Z座標、奥行き方向の傾き角度θの4つの位置情報の計測を短時間で、高精度で、再現性よく行うことができる創薬用自動保管庫に用いられる棚位置自動ティーチング装置を提供する。
【解決手段】創薬研究用のワークを恒温・恒湿・冷凍などの環境のもとで保管管理する垂直及び水平方向に並んだ複数の保管棚と、この保管棚に対してワークの出し入れを行う移載ハンドと、保管棚の最下段及び/又は最上段に挿入される計測用プレート300とを有する創薬用自動保管庫に用いられる棚位置自動ティーチング装置において、計測用プレート300が、保管棚の幅に適合した水平板310と、この水平板310の前面に垂設された垂直板320を有し、この垂直板320が、その中央部に三角形状の凸部330を有していることにより、上記課題を解決する。
(もっと読む)
移載機能付搬送台車
【課題】搬送台車における荷物の上げ下ろし(移載)を作業者1人で安全に行うことが可能な移載機能付搬送台車を提供する。
【解決手段】
載置した荷物を安定した状態で保持する保持部材と、 前記保持部材を支持しパレット用車輪を有する車輪付移載パレットと、 前記車輪付移載パレットを乗せ前後方向に移送するためのレールと、 前記レールを支持するレール支持体と、 前記レール支持体の高さを調節する高さ調節手段と、 前記高さ調節手段を支持し台車用車輪を有する本体フレームと、 前記保持部材の位置と他の位置との間で荷物の移載を行うための前記本体フレームによって支持された多関節アームと、 を備えるようにした移載機能付搬送台車。
(もっと読む)
1 - 20 / 42
[ Back to top ]