
Fターム[3F022MM07]の内容
Fターム[3F022MM07]の下位に属するFターム
信号伝送(制御情報の送受信) (950)
Fターム[3F022MM07]に分類される特許
21 - 40 / 703
所在情報管理システム
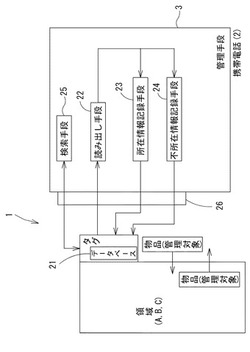
【課題】所要の物品等を必要なときに容易に取り出すことができ、物品の整理収納を容易に行うことができる所在情報管理システムを提供する。
【解決手段】所定領域に収容される管理対象の所在を管理する所在情報管理システム1は、領域特定情報が記録されたRFIDタグと、上記RFIDタグと交信できる交信手段を備えるモバイル機器と、データベース21と、上記モバイル機器に設けられるとともに、情報を入出力できる管理手段3とを備えて構成されており、上記管理手段は、上記管理対象が上記所定領域に持ち込まれたときに、管理対象特定情報と領域特定情報とを関連付けた所在情報を生成するとともに、上記管理対象が上記所定領域から持ち出されたときに、上記管理対象の不所在情報を生成するとともに、上記交信手段を介して上記データベースに記録する不所在情報記録手段24と、上記データベースの所要の情報を検索できる検索手段25とを備える。
(もっと読む)
ピッキング設備

【課題】本発明は、自分のゾーンに加えて隣接する上流の作業ゾーンにおいてピッキング作業が無いとき、さらに上流で搬送されている集品容器に対するピッキング作業を実現し、作業効率をさらに改善できるピッキング設備を提供することを目的とする。
【解決手段】自ゾーンZでも上流ゾーンZでもピッキング作業が無いとき、上流ゾーンZよりさらに上流で搬送されていると特定された集品容器10の中からピッキング作業が必要な集品容器10を求め、この集品容器10に収納する物品11を間口16から取り出し、まとめて仮置台46仮置きするように、間口表示器19と仮置表示器46の表示により指示する。
(もっと読む)
製品位置登録システム
【課題】読取ミスを防止することができる製品位置登録システムを提供する。
【解決手段】部品識別子13が表示された太陽電池セル12がm行×n列に複数個配置された太陽電池モジュール11において、各行の一端側にそれぞれ行情報を有するスタート識別子1a〜7aと、各行の他端側にそれぞれ行情報を有するエンド識別子1b〜7bと、各識別子を読み取るバーコードリーダ17とを有し、バーコードリーダ17は、任意の行のスタート識別子1aを読み取り、任意の行における各太陽電池セル12の各部品識別子13をそれぞれ読み取り、任意の行のエンド識別子1bを読み取って任意の行の読み取りを終了し、読み取った情報から各太陽電池セル12が任意の行におけるいずれの列の位置であるかを判断して各太陽電池セル12の各部品識別子13の情報を位置情報とともに登録する。
(もっと読む)
ピッキング設備およびピッキング設備における識別符号付与方法
【課題】レイアウトに制限がある場合であっても、仕分け先からの注文に対応した固有の識別符号の確認作業が煩雑となることを防ぎ、作業ミスが発生することを防止できるようにする。
【解決手段】複数の集品容器10を搬送する容器コンベヤ23により搬送される各集品容器10に対して、オートラベラ16により予め設定された集品順序を予め設定される移載個数単位(2個)ごとに並べ替えた逆順で仕分け先からの注文に対応した出荷ラベル11を貼り付け、移載個数単位(2個)ごとに容器コンベヤ23とは反対方向に複数の集品容器10を搬送し、搬送する集品容器10に対してピッキング作業が行われる循環式コンベヤ21へ容器コンベヤ23から前記出荷ラベル11が貼り付けられた各集品容器10を移載する。
(もっと読む)
車体位置管理システム
【課題】タグ内の情報を読み取る読取装置との通信可能エリアから外れている台車の位置を従来よりも詳細に把握する。
【解決手段】台車に搭載された台車タグに記憶されている車体識別情報を読み取ることに加えて、部品8とともに台車に載せられている部品タグに記載されている部品識別情報も読み取る処理を実施するように、第1読取装置11、第2読取装置12、第3読取装置13、第4読取装置14をそれぞれ構成した。そして、それら読取装置によって読み取られた情報について、車体識別情報及び部品識別情報の両方であるのか、あるいは車体識別情報だけなのかの違いに基づいて、その車体識別情報に対応する台車について、その読取装置の設置位置を境にして互いに逆側に存在する2つの領域のうち、何れの領域に位置しているのかを判定する判定処理を実施するように、メイン管理装置21を構成した。
(もっと読む)
ネットワークシステム及びその制御方法
【課題】本発明は、電気製品を介して管理又は処理される対象物の管理又は処理を効率的に行えるようにするネットワークシステムを提供することを目的とする。
【解決手段】本発明の実施例によるネットワークシステム(1)には、対象物を管理又は処理するために作動される電気製品(10)と、対象物に関する情報を含む認識対象に記載された情報を認識するために作動される認識装置(160)と、認識装置で認識された情報を記憶し、対象物の管理又は処理が行われるようにする記憶装置(40、140、240)と、認識装置で認識された情報を設定情報に変換するために作動される設定部と、設定部で変換された設定情報を表示するためのディスプレイ部(20、120)と、が含まれる。
(もっと読む)
半導体の製造ラインにおける棚管理システムおよび棚管理プログラム
【課題】半導体の製造ラインにおいて、ロットの搬入および搬出の作業を作業者が行うことを前提とした管理を効率的に行える棚管理システムおよび棚管理プログラムを提供する。
【解決手段】ポジション決定手段82がそのロットを格納すべきポジションを決定すると、ポジション予約手段83はそのポジションを「予約中」とする。入庫入力手段62が入庫完了操作を受け付けると、ポジション予約手段83はそのポジション状態を「使用中」とする。
(もっと読む)
帳票処理システム、及び帳票処理方法
【課題】識別子を帳票に印刷すること無く、一度識別不可能と判定された帳票の種類の識別を可能にする帳票処理システム、及び帳票処理方法を提供する。
【解決手段】本実施形態の帳票処理システムは、帳票の画像データを入力する帳票データ入力部と、画像データに識別子を付与する識別子付与部と、画像データに基づいて帳票の種別を識別する帳票種別識別部と、画像データから日付印情報を抽出する日付印情報抽出部と、識別子と日付印情報とを対応付けて記憶する第1の記憶部と、帳票種別識別部で種別が識別できなかった帳票について入力された帳票の種別と当該帳票に付与された識別子とを対応付けて記憶する第2の記憶部と、帳票種別識別部で種別が識別できなかった帳票について、再度入力された画像データから日付印情報を抽出し、この抽出した日付印情報に基づいて第1の記憶部と第2の記憶部を参照して当該帳票の種別を識別する帳票再識別部と、を備える。
(もっと読む)
試料保管装置
【課題】簡素な構成でありながら、多数の試料を確実な管理下にて保管することができ、小規模な試験、研究施設において好適に使用可能な試料保管装置を提供する。
【解決手段】試料を収容する複数のマイクロチューブ3を、収納筐1から引き出した保管トレイ2上に縦横に並べて保管する試料保管装置において、収納筐1の天板前部の中央に基台4を介して光照射器5を取り付け、この光照射器5による照射光が引き出し状態にある保管トレイ2上に形成する光スポットを、制御部6により基台4のパンチルト動作を制御することで走査し、コードリーダ62の読み取りによって受け付けた試料の識別情報に応じて、保管トレイ2上での試料の保持位置を指示する構成とする。
(もっと読む)
在庫管理方法
【課題】1日のうちで生産品の余剰在庫を極力無くし、適切な在庫管理を行うことができる在庫管理方法を提供する。
【解決手段】自工程情報取得ステップS1及び出荷台数補正ステップS3にて取得した情報に基づいて、当該日の生産品の在庫推移をシュミレーションして、その結果に基づいて、生産品の当該日稼動開始時点における必要な在庫数を決定する。
(もっと読む)
目録品を移送するシステムおよび方法
【課題】目録品を移送する方法を提供する。
【解決手段】目録品を移送する方法が、移動駆動ユニットを作業スペース内の第一の点に移動させることを含む。第一の点は、目録品ホルダーの位置である。本方法はさらに、前記移動駆動ユニットを目録品ホルダーとドッキングさせ、前記移動駆動ユニットおよび前記目録品ホルダーを前記作業スペース内の第二の点に移動させることを含む。第二の点は、搬送設備に関連付けられている。本方法はさらに、前記目録品ホルダーを前記作業スペース内の第三の点に、前記搬送設備を使って移動させることを含む。
(もっと読む)
コイル認識装置
【課題】クレーンによりコイルを吊り上げる現場にてコイルの大きさを認識でき、情報管理システムに入力されている情報の誤りによる誤動作を回避できるコイル認識装置を提供する。
【解決手段】コイル認識装置では、コイル荷台1の側方に配置されるセンサ基台30にスキャンセンサ36及び水平距離センサ37が取付けられている。スキャンセンサ36は、コイル2の外周面20までの最短距離を測定し、水平距離センサ37は、コイル荷台1の側面1bまでの水平距離を測定する。演算部38は、スキャンセンサ36及び水平距離センサ37からの信号に基づいて、コイル2の半径を求める。
(もっと読む)
画像処理装置および画像処理システム、ならびにそれらに向けられたガイダンス装置
【課題】汎用的なロボットが配置されている生産ラインであっても、コンベアトラッキング等の処理を容易に実現できる画像処理装置および画像処理システム、ならびにそれらに向けられたガイダンス装置を提供する。
【解決手段】画像処理装置は、搬送装置上のワークの位置情報を管理する管理手段と、撮像部の撮像によって得られた画像に対して計測処理を行うことで、画像中の予め登録されたワークに対応する領域の位置情報を取得する取得手段と、管理手段によって管理されているワークの位置情報を撮像部の撮像が行われたタイミングに対応する値に更新する更新手段と、更新手段による更新後の位置情報と計測処理によって取得されたワークの位置情報とを比較することで、撮像部の撮像範囲内に新たに搬送されたワークを特定する特定手段と、特定手段が特定したワークの位置情報を制御装置へ送信する送信手段とを含む。
(もっと読む)
在庫管理システム及び在庫管理方法
【課題】 材料の出庫計画の作成作業及び材料の出庫作業をより効率良く実施することができる在庫管理システムを提供する。
【解決手段】 在庫管理システム100を、計量装置103と、メモリ素子104と、記録装置105と、読み取り装置106と、情報処理部109と、所要量展開処理部110とを備える構成とする。計量装置103は、作業現場に配置された容器102の内部に含まれる材料の重量を測定する。そして、所要量展開処理部110は、製造に必要な材料の所要量を算出し、該算出した材料の所要量から材料の重量を減算して材料の出庫予定量を算出する。
(もっと読む)
生産または物流管理装置及び生産または物流管理方法
【課題】離散型シミュレーションの膨大なルール化を排除するとともに実態に即したシミュレーション機能を備えた生産または物流管理装置を提供する。
【解決手段】ものは、台車によってA工程エリア13〜C工程エリア15間を移動する。ものが各工程エリア内の設備に入ったときのIN時刻及びものが各工程エリア内の設備から出たときののOUT時刻は、データ取得端末32に記録される。ものがC工程エリア15内の設備を出たときに、データ取得端末32は、それまでに取得したIN時刻及びOUT時刻と予め設定された設定情報(例えばもの品種など)とを関連付けて工程データを作成する。生産・物流シミュレータ25は、工程データに基づいて、ものが一の工程、移動時間、次工程、さらなる工程を経て、処理が完了するまでの一連の流れを図式化するものチャートを出力する。
(もっと読む)
プラント建設支援方法およびプラント建設支援装置
【課題】製品資材の固有識別番号コードを資材に貼りつけている場合に、個体管理のためのデバイスまたはシールを貼る作業が製品資材の製造工程の負担となる。また固有識別番号を認識するだけで設計時に作成した形状との照合がされておらず、据付形状として正しい資材が到着したかどうかが据付作業開始まで不明である等を解決するプラント建設支援装置を提供する。
【解決手段】自己位置計測機能、方位検知機能を備える光学的距離計測装置を用いてプラント建設用の製品資材の形状寸法、配置角度等を非接触で測定する手段と、測定した情報から得られる製品資材の物体境界情報と、あらかじめ設計時に作成しておいた三次元モデル情報を照合して、製品資材の個体認識番号を取得して、プラント建設用の製品資材のプラント建設サイトへの到着を判定する。
(もっと読む)
ピッキングシステム
【課題】効率良くピッキング作業ができるピッキングシステムを提供する。
【解決手段】ピッキングシステム1は、複数のゾーンからなる棚手段3を備える。各ゾーンは、ピッキング対象物である商品を保管する複数の間口2を有する。ピッキングシステム1は、間口2に対して商品を割り付ける制御手段10を備える。制御手段10は、グループ名データ、割り付け範囲指定用のゾーン位置データおよび割り付け範囲指定用の間口位置データを含むものであって商品特性に対応するグループ情報に基づいて、間口2に対して商品を割り付ける。
(もっと読む)
コード情報読取装置及び物品管理システム並びにプログラム
【課題】装置本体と読取対象のコード情報との距離に関わらず、コード情報を読み取るだけで、そのコード情報の位置を特定できるコード情報読取装置を提供する。
【解決手段】CPU11は、イメージスキャナ16のオートフォーカス機能による距離情報、GPS部17による位置情報及び高度情報、地磁気センサ部18による方向情報を取得して、この距離情報、位置情報及び高度情報、方向情報に基づいて、読取対象(例えば、二次元コードや一次元コード)の位置情報を算出すると共に、算出したコード情報の位置情報に基づいて棚情報テーブルM3を検索することにより、該当する「棚アドレス」を棚情報テーブルM3から読み出す。
(もっと読む)
自動倉庫
【課題】効率よく荷物の入出庫を行うことのできる自動倉庫を提供すること。
【解決手段】複数の棚75を有する第一ラック70aと、移載装置30と、コントローラ100とを備える自動倉庫1であって、コントローラ100は、複数の指令情報を順次受信する受信部102と、複数の指令情報を蓄積する蓄積部104と、第一指令情報に示される所定の荷物を載置する棚である入庫棚を複数の棚の中から決定する決定部106と、第一指令情報の次に実行すべき第二指令情報に示される指令が実行可能であるか否かを判定する判定部108とを有し、決定部106は、(a)第二指令情報に示される指令が実行可能であると判定された場合、第二指令情報に示される指令の内容に基づいて入庫棚を決定し、(b)第二指令情報に示される指令が実行可能でないと判定された場合、第二指令情報の次に実行すべき第三指令情報に示される指令の内容に基づいて入庫棚を決定する。
(もっと読む)
模擬装置、模擬プログラム、および模擬方法
【課題】演算負荷を低下させつつシミュレーションによる模擬精度の向上を図ること。
【解決手段】(A)は、ワーク搬送状態を示している。ストッパSは、P1に設置されている。P1はストッパSの設置位置であるとともに、ワークが滞留していない状態では、到来するワークの停止位置にもなる。(B)は、ワークW1の滞留状態を示している。ワークW1がストッパSで停止させられると、停止位置P1が、ワークW1の搬送方向長w1分手前にオフセットされ、P2に更新される。(C)は、ワークW1,W2の滞留状態を示している。ワークW2がワークW1に到達すると、ワークW2が停止する。そして、停止位置P2が、ワークW2の搬送方向長w2分手前にオフセットされ、P3に更新される。
(もっと読む)
21 - 40 / 703
[ Back to top ]