
Fターム[3F022MM08]の内容
Fターム[3F022MM08]に分類される特許
1 - 20 / 950
コイルヤードにおけるコイル配置方法
トレイ積み鶏卵の受け入れ保管方法及びその装置
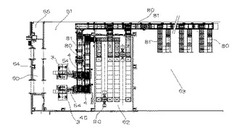
【課題】生産農場から台車で納入された鶏卵を情報と共に受け入れて冷蔵保管する貯卵庫のスペースを削減すると共に割卵に必要な鶏卵を貯卵の搬入・搬出のための搬送用のフォークリフトをなくしたトレイ積み鶏卵の受け入れ保管方法及びその装置を提供する。
【解決手段】生産農場で生産された鶏卵はエッグトレイを6段に重ねて農場の台車で納入される。台車からラックアウトによりエッグトレイの重ねた状態で、生産農場や採卵日などの情報が管理され、自動ラック用に開発された約1m角のトレイに積載し冷蔵の自動ラックによる貯卵することにより、貯卵庫のスペースは従来の50%に削減され、搬送用のフォークリフトもなくすことが出来る。
(もっと読む)
電動式移動棚

【課題】構成が簡単で、迅速に順次駆動が行われる電動式移動棚を得る。
【解決手段】複数の移動棚がモータ14の駆動力により移動可能に並べられてなる電動式移動棚システムを構成する個々の電動式移動棚が、駆動源であるモータ14と、モータ14の正逆回転および停止を制御する制御回路10と、を有し、個々の移動棚における制御回路10は、目標とする駆動デューティと現在の駆動デューティを比較するデューティ比較部102を有し、個々の移動棚は、デューティ比較部102による比較結果が現在の駆動デューティより目標とする駆動デューティが大きい場合にモータ14を駆動するモータ駆動回路部13を有してなる。
(もっと読む)
搬送システムおよびその制御方法
【課題】各生産装置の稼働率が低下することを抑制することができると共にリードタイムの増加を抑制することができる搬送システムおよびその制御方法を提供する。
【解決手段】複数の生産装置それぞれに対する保管庫に収容されている合計カセット数を示す保管庫データを作成し、保管庫データに基づいて合計カセット数が閾値以上である場合には当該カセットを処理する生産装置を特定装置とする特定装置データを作成する。そして、特定装置データに基づいて搬送元移載箇所または搬送先移載箇所が特定装置である搬送指示の優先度を高いものに変更し、搬送元エリアに搬送指示が割付けられていない搬送台車がなく、選択した搬送指示の優先度が搬送指示変更部で高いものに変更され、かつ搬送元エリアに搬送指示が割付けられているがカセットを搭載せずに搬送元エリアを搬送している搬送台車がある場合、当該搬送台車に改めて選択した搬送指示を割付ける特別割付けを行う。
(もっと読む)
自動倉庫設備
【課題】地震の揺れによる損傷を極力抑制できる自動倉庫設備を提供すること。
【解決手段】物品収納棚3が、棚奥行き方向に並べて配置される前後一対の支柱6a・6bからなる支柱対6を棚横幅方向に間隔を隔てて複数立設して構成され、かつ、棚横幅方向で支柱対の間に収納部2が位置するように構成され、地震による揺れが発生することを知らせる揺れ予測情報を受信する揺れ予測情報取得手段が設けられ、スタッカークレーン5の作動を制御する制御手段が、スタッカークレーンを走行作動させている場合において、揺れ予測情報取得手段が揺れ予測情報を取得すると、地震対策処理としてベイごとに設定された走行停止位置にスタッカークレーンを停止させるべく、スタッカークレーンの作動を制御するように構成されている。
(もっと読む)
自動搬送システム
【課題】コストを抑制しつつ、走行経路の変更要求に柔軟に対応できる自動搬送システムを提供すること。
【解決手段】操舵可能な駆動輪を含む駆動ユニット、及び駆動ユニットを制御する制御ユニットを備えた自動搬送車2と、自動搬送車2の位置を検知する位置検知手段と、を備え、予定された経路に沿って自動搬送車2を移動させる自動搬送システム1では、自動搬送車2が移動するエリアとして、位置検知手段による検知位置を利用して自動搬送車2が制御される誘導走行エリア1A、及び自動搬送車2の位置が検知されないエリアであって検知位置を利用することなく自動搬送車2が制御される自律走行エリア1Bが設定されている。
(もっと読む)
物品投入設備および物品投入設備における集品容器からの物品のはみ出し検出方法
【課題】本発明は、集品容器から落下するおそれのある物品を正確に検出でき、設備の処理効率の低下を防止できる物品投入設備および物品投入設備における集品容器からの物品のはみ出し検出方法を提供する。
【解決手段】上方開放部から物品13が投入される集品容器12を搬送経路に沿って搬送する搬送装置14と、搬送経路に沿って配置され、集品容器12に対して物品13の投入を行う投入装置15と、搬送経路における投入装置15の下流側に配置され、搬送される集品容器12の上端より上方に位置する物体の存否を検出する光電センサ18と、光電センサ18による物体の搬送方向に沿った検出長さに基づいて検知距離を演算し、検知距離が予め設定される閾値を上回ると荷繰りが必要であると判定する構成とした。
(もっと読む)
物品投入設備およびその制御方法
【課題】搬送される集品容器へ投入装置によって物品の落下投入を行うときに、物品が集品容器からこぼれ落ちる可能性を低減させる。
【解決手段】物品13の出し入れが可能な上方開口部24を有する集品容器12を搬送経路に沿って搬送する搬送装置14と、搬送装置14の搬送経路に沿って配置され、集品容器12が搬送経路における物品13の投入位置に達したときに、上方から集品容器12の上方開口部24へと物品13の投入を行う投入装置15と、集品容器12から搬送経路にこぼれ落ちた物品13A、13Bを検出する検出手段22と、物品13が集品容器12から搬送経路にこぼれ落ちたときの状況を認識して、当該物品13の集品容器12からのこぼれ落ち傾向を判定する判定手段16,17とを備える。
(もっと読む)
ピッキング用の表示装置
【課題】スイッチの操作効率を向上させることができるピッキング用の表示装置。
【解決手段】筐体状に構成された本体部1と、保持部2と、本体部1又は保持部2のいずれかに設けられるスイッチとを備え、本体部1は、筐体11と、ピッキング情報を表示する表示部12と、外部通信機器と通信して表示部12を制御する通信制御部14とを有し、スイッチは、非押下状態では、通信制御部14から外部通信機器への作業情報の送信を待機状態とし、押下状態になると、送信が実行されるように切換えられ、かつ、切換えが筐体11と保持部2との協働でなされるよう構成され、本体部は、保持部2に対して、スイッチが非押下状態となる待機位置に位置していて、かつ、保持部2が配置されている側に外部から押されることで、スイッチが筐体11と保持部2との協働で押下されて押下状態となる押下位置に移動するように保持されている。
(もっと読む)
物品管理システム、物品管理方法及び物品管理プログラム
【課題】効率よく、物品を管理する情報を自動で生成する。
【解決手段】倉庫内の物品の周辺を移動する移動体に、アクティブRFIDタグと、パッシブRFIDリーダを設け、倉庫内にアクティブRFIDタグの無線信号を受信する複数のアクティブRFIDリーダを設けておく。また、物品を管理する情報を生成する管理装置10の検出部36が、エリア情報DB50を参照し、アクティブRFIDリーダそれぞれで受信される無線信号の信号強度に基づいて、移動体60の時刻毎の位置を検出し、時刻特定部40が、タグIDがパッシブRFIDリーダにより読み取られた時刻を特定し、生成部42が、時刻特定部の特定結果と、検出部の検出結果との関係から、タグIDの取得位置(エリア)を含む物品を管理する情報(管理情報DB56)を生成するようにする。
(もっと読む)
宅配支援システム
【課題】配送人や配送車の配送時間効率が上がり、燃料費の節約も可能となる宅配支援システムを提供する。
【解決手段】配送事業者が宅配支援サービスを受けようとする顧客から、インターネット等を介して取得した顧客情報から荷物ロッカーに貼る顧客認証RFIDタグと、管理ボックスに装填する顧客情報記録媒体を作成し、配送人の携帯する管理ボックスを顧客の管理する荷物ロッカーに装着することで顧客認証を行い、認証可の場合には通電され電気錠を解除し荷物の出し入れをする。荷物ロッカーには前記電気錠と顧客が解施錠するためのシリンダ錠の2系統を備え、電気錠のノッチとシリンダ錠のレバーを噛みあわせることで、どちらか一方の解錠で扉が開く状態となり、どちらか一方の施錠で扉が開かない状態の構成としているため顧客はシリンダ錠の操作で荷物の出し入れができる。
(もっと読む)
物品管理システム
【課題】本発明は、管理領域外においては通信を禁止できる無線通信用タグを提供することを目的とする。
【解決手段】タグ11が取り付けられた物品100が、再生産処理工場102に入荷されると、タグ11にアンテナモジュール12が取り付けられる。これにより、再生産処理工場102において、物品100に取り付けられた無線通信用タグ1は通信可能な状態となる。一方、再生産処理工場102から物品100が出荷されるとき、アンテナモジュール12がタグ11から取り外される。これにより、再生産処理工場102の外域では、物品100にタグ11だけが取り付けられた状態となるため、通信不可能な状態となる。
(もっと読む)
ストアシステム
【課題】管理システム側の管理データを増大させることなく、ワークの先入先出が効率的に実施可能で、工程変更等に対して柔軟性のあるストアシステムを提供する。
【解決手段】無人搬送車2が自走する搬送ルートは、ストアエリア11の所定位置に、ワークWを収容した被搬送台車3aを搬入する搬入ルート15と、ストアエリア11の所定位置から、ワークWを収容した被搬送台車3aを搬出する搬出ルート17とに互いに独立して構成されるので、管理システム側の管理データを増大させることなく、ワークWの先入先出が効率的に実施可能で、工程変更等に対して柔軟性を有するようになる。
(もっと読む)
ロボット仕分けシステム、ロボット装置、及び仕分け済み物品の製造方法
【課題】作業者の労力負担を低減しつつ信頼性を向上できるようにする。
【解決手段】ロボット仕分けシステム1は、搬入側カーゴ9と、搬出側カーゴ10A〜10Fと、アーム24、吸着パッド25、レーザセンサ26、及びビジョンセンサ27を有するロボット11と、ロボットコントローラ14とを有しており、レーザセンサ26により搬入側カーゴ9に載置された複数の荷物4それぞれの上面までの距離情報を取得し、上面が最も高い位置に存在する荷物4を特定し、ビジョンセンサ27により上記特定された特定の荷物4の外形情報を取得すると共に特定の荷物4の仕向地情報の取得を図り、特定の荷物4の形状及び大きさを算出し、特定の荷物4に対応した特定の仕向地区域を決定し、特定の荷物4を吸着パッド25により持ち上げつつ特定の仕向地区域に対応した特定の搬出側カーゴ10へ積み付けるように、ロボット11の動作を制御する。
(もっと読む)
搬送車システム
【課題】経路上に進入禁止区間が設けられた場合であっても、効率的な搬送作業を可能とする搬送車システムを提供すること。
【解決手段】経路140と、複数の搬送車300と、複数の搬送車300の制御を行うコントローラ120とを備える搬送車システム100であって、MCS120は、搬送要求を受信する通信部121と、進入禁止区間を示す区間情報および予備期間を示す予備期間情報を記憶する記憶部122と、搬送要求が、予備期間内において実行の開始が予定され、かつ、目的地が進入禁止区間に含まれている特定搬送要求であるか否かを判定する判定部125と、当該搬送要求が特定搬送要求であると判定された場合、目的地の代わりとなる代替目的地を決定する代替目的地決定部126と、決定された代替目的地に、複数の搬送車200のうちのいずれかの搬送車200を向かわせるための搬送指令を送出する指令送出部127とを備える。
(もっと読む)
入荷情報記録システム、入荷情報記録方法、及びプログラム
【課題】安価な設備投資で、入荷した物品のデータを迅速に記録できる入荷情報記録システムを提供する。
【解決手段】入荷情報記録システムは、入荷拠点ごとに独立して設けられるデータベース6と、入荷拠点に入荷される物品を特定する符号および該物品の数量のデータを含むバーコードBを印刷する印刷部と、入荷拠点に入荷された物品に添付されたバーコードBから、入荷拠点に入荷された物品を特定する符号および該物品の数量のデータを抽出する物品データ抽出部61と、物品データ抽出部61が抽出したデータを、物品が入荷された入荷拠点に設けられるデータベース6に記録する入荷履歴データ記録部63とを備える。
(もっと読む)
部品管理システム
【課題】部品の保管位置に対応して照射位置を変更できる部品管理システムを提供すること。
【解決手段】複数部品Sを保管し、入出庫をするための部品管理システム1であって、複数部品Sを保管するための棚11,12が設けられた保管棚10と、保管棚10に保管された部品Sを取り出す側と対向する位置に設けられ、部品Sの保管位置を指し示すためにレーザ照射位置Pを変更可能なレーザポインタ20と、部品SのID情報および保管位置情報を入力する入力手段30と、部品SのID情報と保管位置情報との対応関係を記憶する保管位置記憶部52を有し、レーザポインタ20のレーザ照射位置Pを制御する制御手段50とを備え、部品出庫時にオペレータが入力手段30に出庫する部品SのID情報を入力すると、制御手段50は、該対応関係に基づいてレーザポインタ20のレーザ照射位置Pを当該部品Sの保管位置に制御する。
(もっと読む)
ロボット仕分けシステム及び仕分け済み物品の製造方法
【課題】既存の設備で、被仕分け物品に関する仕分けパラメータの変動に柔軟に対応して仕分けを行うことができるようにする。
【解決手段】ロボット仕分けシステム1は、搬入側カーゴ9と、搬出側カーゴ10A〜10Fと、アーム24、吸着パッド25、レーザセンサ26、ビジョンセンサ27を有するロボット11と、ロボットコントローラ14を有しており、レーザセンサ26で搬入側カーゴ9に載置された複数の荷物4それぞれの上面までの距離情報を取得し、上面が最も高い位置にある荷物4を特定し、ビジョンセンサ27で上記特定された特定の荷物4の外形情報を取得すると共に特定の荷物4の仕向地情報の取得を図り、特定の荷物4の形状及び大きさを算出し、特定の荷物4に対応した特定の仕向地区域を決定し、特定の荷物4を吸着パッド25で持ち上げつつ特定の仕向地区域に対応した特定の搬出側カーゴ10へ積み付けるように、ロボット11の動作を制御する。
(もっと読む)
食品配置演算装置、食品配置演算方法及び食品配置演算プログラム
【課題】食品が互いに影響することが少ない配置の組合せを演算する方法を提供する。
【解決手段】複数の配置場所を有する容器に複数の食品を配置する場所を演算する食品配置演算方法にかかわり、隣り合う領域が影響を及ぼす程度を示す容器情報を設定し記憶部に記憶する容器情報設定工程と、食品が他の食品に影響を及ぼす程度を示す影響度属性と食品が他の食品に耐性を備える程度を示す耐性属性と、の属性を示す食品情報を設定し記憶部に記憶する食品情報設定工程と、食品情報から食品の相性を示す相性情報を演算部が演算する相性情報演算工程と、容器に配置する食品の種類を示す食品リストを設定し記憶部に記憶する食品リスト設定工程と、配置場所に食品を配置したときに隣り合う食品の影響が少ない組合せを演算部が演算する配置演算工程と、を有する。
(もっと読む)
情報処理装置、情報処理方法、プログラム
【課題】梱包を要するバラ扱いの品目が含まれる出荷指示がある場合においても二次仕分け作業を無くすことが可能な出荷指示を抽出可能とする。
【解決手段】複数の出荷情報から所定の出荷情報を抽出可能な情報処理装置であって、品目毎に当該の種別を特定する情報が割り当てられている複数の出荷情報を管理する管理手段と、前記管理手段により管理される出荷情報のうち、品目の種別を特定する情報として梱包を要する品目であることを示す情報が割り当てられている品目を1つ含む出荷情報を抽出する第一の抽出手段とを有する。
(もっと読む)
1 - 20 / 950
[ Back to top ]