
Fターム[3F022PP02]の内容
Fターム[3F022PP02]に分類される特許
1 - 20 / 38
製品保管方法,製品保管装置,加工システム,被保管製品の製造方法,及び被保管製品
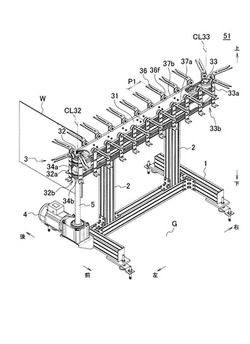
【課題】多くの工数及び大きい負荷が生じることなく、異なる厚さの加工製品を高いスペース効率で保管することができる製品保管方法を提供する。
【解決手段】板状又は立体状の加工製品(W)を集合保管する製品保管方法である。所定の経路で循環移動する紐状又は帯状の無端循環部材(34a)に加工製品(W)を保持可能な複数のホルダ(36)を所定のピッチ(P1)で取り付けておき、加工製品(W)の厚さ(hz)に応じてホルダ(36)の間隔を選定する。無端循環部材(34a)を循環移動させると共に、複数のホルダ(36)の内、選定した間隔に対応したホルダ(36)に加工製品(W)を保持させる。
(もっと読む)
荷姿認識装置

【課題】自動車の組立部品の納入等の物流工程において、パレット上に積載された箱体の種類、形状、寸法及び位置等の荷姿情報を自動的に認識する荷姿認識装置を提供する。
【解決手段】走査装置7の可動ラインカメラ8及び固定ラインカメラ10により、パレット2上に積載された箱体3の第1面〜第4面W1、W2、L1、L2について走査する。走査データから、箱体3に貼り付けられた帳票4の2次元コードを抽出し、2次元コードの位置を表す座標データを生成し、また、抽出した2次元コードに基づきデータベースから箱体3の形状、寸法及び2次元コードの表示位置を含む箱体情報を取得し、2次元コードの位置を表す座標データ及び箱体情報に基づき、パレット2上に積載された箱体3の荷姿情報として、箱体3の各部の座標データを生成する。
(もっと読む)
画像処理装置および画像処理システム、ならびにそれらに向けられたガイダンス装置
【課題】汎用的なロボットが配置されている生産ラインであっても、コンベアトラッキング等の処理を容易に実現できる画像処理装置および画像処理システム、ならびにそれらに向けられたガイダンス装置を提供する。
【解決手段】画像処理装置は、搬送装置上のワークの位置情報を管理する管理手段と、撮像部の撮像によって得られた画像に対して計測処理を行うことで、画像中の予め登録されたワークに対応する領域の位置情報を取得する取得手段と、管理手段によって管理されているワークの位置情報を撮像部の撮像が行われたタイミングに対応する値に更新する更新手段と、更新手段による更新後の位置情報と計測処理によって取得されたワークの位置情報とを比較することで、撮像部の撮像範囲内に新たに搬送されたワークを特定する特定手段と、特定手段が特定したワークの位置情報を制御装置へ送信する送信手段とを含む。
(もっと読む)
寸法測定装置および寸法測定装置を備えた荷搬送ロボット
【目的】寸法測定装置および荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体16には、エリアセンサ26と左右一対のアーム17を設け、アーム17の先端付近には対向する内側に向けて突設された手先部30が傾動可能に設けられる。手先部30を荷の基端面W1の左右端面に当接可能な位置でアーム17を伸縮させることで、荷Wの側面に当接し傾動した状態の手先部30は荷の遠端面W2において傾動状態から復帰し、そのときのアーム17の伸長量から遠端面W2の位置を算出する。荷Wの奥行寸法は、エリアセンサ26により測定した本体16からの基端面W1の位置と、手先部30が傾動復帰したときの遠端面W2の位置から演算する。
(もっと読む)
搬送車の横移動機構
【課題】比較的簡易な構成により横移動機構の飛出しを的確に検知する。
【解決手段】搬送車100の横移動機構30は、第1ベース32と、第2ベース33と、第1光透過型センサ45と、第1遮光部43と、判定部とを備える。第1遮光部は、第2ベースが第1ベースの下方に収納される収納状態にある場合、第1光透過型センサにおける第1発光部からの第1光を遮光しない位置にあり、第2ベースが第1ベースに対し第1方向に移動した第1横移動状態にある場合、第1光を遮光する位置にあり、判定部は、第1光透過型センサにおける第1受光部が第1光を受光する場合に出力される第1信号が入力される場合、第2ベースが第1横移動状態より他の状態にあると判定し、第1信号が入力されない場合、第2ベースが第1横移動状態にあると判定する。
(もっと読む)
ピッキング動作検出システム及びピッキング動作検出方法並びにピッキング動作検出プログラム
【課題】作業者によるピッキングの動作を検出するためのピッキング動作検出システム及びピッキング動作検出方法並びにピッキング動作検出プログラムの改良を提供する。
【解決手段】本発明では、作業者によってピッキングされる対象物を載置しておく複数の載置部(4a〜4i)と、複数の載置部(4a〜4i)の画像を継続して撮影する撮像手段(カメラ5)と、作業者によって対象物がピッキングされた載置部(4a〜4i)を判定する判定手段(コンピュータ7)とを有し、複数の載置部(4a〜4i)の画像を継続して撮影し、撮影した画像の変化に基づいて作業者によって対象物がピッキングされた載置部(4a〜4i)を判定することにした。これにより、本発明では、配線作業やメンテナンス作業を著しく軽減することができ、また、ピッキングの対象物の数の増減にも容易に対応することができる。
(もっと読む)
図書情報データベース処理システム及びこの処理システムを用いた図書保管管理システム
【課題】図書情報データベースの新たなデータ項目として図書厚さ寸法を容易に得ることができる図書情報データベース処理システム、及びこの処理システムを用いた図書保管管理システムを提供すること。
【解決手段】図書情報データベース処理システム20は、既存の図書情報データベースDB1が有する少なくとも各図書ごとの図書識別データと頁数データとを取得する取得部20aと、この取得部20aが取得した頁数データに基づき図書厚さ寸法を演算する演算部20bと、図書識別データとこの図書識別データに対応づけて演算部20bで演算された図書厚さ寸法データとを出力する出力部20cと、を備えた。
(もっと読む)
物品管理装置、物品運搬装置、物品処理システム及び方法
【課題】 所定の領域(例えば、カートにおける籠の中)にある物品を管理する精度を向上させる。
【解決手段】 本発明は、所定の領域内の物品を管理する物品管理装置に関する。そして、本発明の物品管理装置は、上記領域に入る物品及び上記領域から出る物品を撮影して、撮影画像データを取得する撮影手段と、物品ごとの画像に係る物品画像情報を保持する物品画像情報保持手段と、少なくとも撮影手段が取得した撮影画像データと、物品画像情報保持手段が保持している情報とを利用して、上記領域内の物品を管理する物品管理手段とを有することを特徴とする。
(もっと読む)
搬送システム
【課題】物品を収容した収容箱をキャスター輪付きの台車に載せた被搬送体を採用しながらも、被搬送体の保管ステージへの入出庫の移送を自動化できる搬送システムを提供する。
【解決手段】搬送システムは、搬入ステージ5に装備され被搬送体Wを搬送可能なローラコンベア20と、保管兼搬送ステージ7に装備され複数の被搬送体Wを複数列に整列させた状態で保管し且つ台車のキャスター輪を介して列方向へ搬送可能な保管兼搬送装置60Mと、搬入ステージ5の下流部分の上方空間に装備されローラコンベア20から排出された被搬送体Wを搬送し且つ方向変換して保管兼搬送装置60Mの上流部の複数の列対応部に振り分けるローダ装置40等を有する。
(もっと読む)
有軌道走行車
【課題】レールとガイドローラとの間のクリアランスを適切に調整することにより、安定して走行可能な有軌道走行車を提供する。
【解決手段】スタッカクレーン200は、ガイドレール140の両側にそれぞれ所定のクリアランスを設けて配置される一対のガイドローラ222、223と、ガイドレール140と一対のガイドローラ222、223との間のクリアランスが所定の範囲内に収まるように、一対のガイドローラ222、223の位置を変更するクリアランス調整手段とを備える。
(もっと読む)
監視装置および監視プログラム
【課題】段積みされる各箱について積載荷重の超過による変形が生じたり、吸湿による強度劣化で変形したりすることを防止する監視装置を実現する。
【解決手段】ステップSA2では、荷姿を撮像した画像データに画像認識を施して各箱の画像領域に箱IDを付与すると共に、それらの初期位置を取得する。ステップSA3では、積載数テーブルから箱ID毎の箱タイプに対応する最大積載数Maxを読み出し、さらに湿度変化テーブルに基づき現在の湿度データに応じて、読み出した各箱ID毎の最大積載数Maxを許容段数に変換し、この許容段数を超える過積載状態の箱IDが存在すると警報報知する。ステップSA4では、各箱ID毎の位置情報を取得して初期位置との差分から各箱IDの変形量を算出し、吸湿による強度劣化で規定値以上変形した箱IDが存在すると警報報知する。
(もっと読む)
コンテナ、特に標準コンテナ用の倉庫における荷役方法
【課題】 スループットレートおよび安全に関して最適化された標準コンテナ用の倉庫における荷役方法を提供する。
【解決手段】 本発明は、コンテナ(2)がコンテナスタッカクレーン(13)によって自動的に入出庫され、かつコンテナ(2)が積み降ろし領域(8)でコンテナスタッカクレーン(13)によって、倉庫(4)に隣接する積み降ろし領域(8)の駐車スペース(12)に駐車したトラック(7)に荷降ろしされ、または積み降ろし領域(8)の駐車スペース(12)に駐車したトラック(7)から荷積みされる、コンテナ(2)特に標準コンテナ用の倉庫(4)における荷役方法に関する。コンテナ用の倉庫における荷役方法をそのスループット性能および安全性に関して最適化するために、トラック(7)が駐車スペース(12)内に乗り入れた後、かつトラック(7)の運転手が駐車スペース(12)を離れた後で、駐車スペース(12)で少なくとも1人の人間特にトラック(7)の運転手の存在防止を確保し、自動積み降ろしプロセスのためにコンテナスタッカクレーン(13)に解除信号を与えることを提案する。
(もっと読む)
無線タグ通信装置及び物品管理システム
【課題】無駄な電力消費を防止し省エネルギを図れると共に、棚卸し作業の効率の向上を図ることができる無線タグ通信装置及び物品管理システムを提供する。
【解決手段】カメラ140が映像を撮影した収納領域40を特定し、収納棚30に収納された複数の書類ファイル50の棚卸し状態に係わる棚卸し情報を格納したID・収納領域管理データベース320から、特定した収納領域40に係わる棚卸し情報を取得し、この取得した棚卸し情報に基づき特定した収納領域40の棚卸しが完了したかどうかを判定し、棚卸しが完了している場合には装置アンテナ110からの電波の送信を停止する。
(もっと読む)
物品収納設備における学習装置
【課題】コストの低減を図るとともに、目標左右移動距離情報及び目標上下移動距離情報を学習する学習作業の簡素化を図ることができる物品収納設備における学習装置の提供。
【解決手段】学習制御手段は、基準用学習マーク体39bについて、学習制御手段に対する教示により基準左右設置位置情報ZX及び基準上下設置位置情報ZYを取得する基準取得処理、検出対象の学習マーク体39の夫々について、基準取得処理にて取得した基準左右設置位置情報ZX及び基準上下設置位置情報ZYに基づいて定めた移動情報に基づいて物品移載手段を移動させる移動処理、及び、移動処理において学習マーク体検出手段が検出対象の学習マーク体39を検出したときの左右移動距離検出手段及び上下移動距離検出手段の検出情報から検出対象の学習マーク体39の夫々についての左右設置位置情報及び上下設置位置情報を求める演算処理を実行する検出対象取得処理を行う。
(もっと読む)
物品置場計画策定システム及び方法
【課題】物品置場計画の策定がしやすい物品置場計画策定システムを提供する。
【解決手段】本発明はHMIのディスプレイ画面にて、置場フロアのレイアウト上の該当位置に物品それぞれのシェイプを表示させ、新規に置き場所を設定する物品の物品識別名と置場使用開始日時と終了日時との入力を受け、物量マスタファイルを参照して該当物品のシェイプを呼び出して画面上の所定のイニシャルポジションに表示させ、イニシャルポジションに表示されている物品のシェイプの移動先をHMIの入力手段にて指定操作させることでフロアレイアウト上の任意の置き場所に配置させ、物品のシェイプの配置された置き場所の座標を読み取ることにより、当該物品について物量マスタファイルの該当する物品データにその置場使用開始日時と終了日時と置場座標とを登録する物品置場計画策定システムを特徴とする。
(もっと読む)
物品収納設備
【課題】部材点数の増加及びコストの増加を招くことなく、ピッキング用収納部の後端部に物品の後端部を合わせてピッキング用収納部に物品を収納できる物品収納設備の提供。
【解決手段】制御手段は、物品を搬入部4又はピッキング用収納部以外の収納部から受け取るときに、フォーク28cの先端側端部T1と物品1の後端部Q1とを合わせる状態でフォーク28cにて物品1を載置支持すべく、物品1の長さ情報に応じて求められる突出量にフォーク28cの突出量を設定して、物品搬送装置の作動を制御する先端側突出量調整処理を行い、且つ、ピッキング用収納部に物品1を収納するときに、ピッキング用収納部の後端部にフォークの先端側端部を合わせる状態でピッキング用収納部に物品を収納すべく、フォークの突出量を予め定めたピッキング用突出量に設定して、物品搬送装置の作動を制御する先端側ピッキング用突出処理を行うように構成されている。
(もっと読む)
端材ストッカ管理装置
【課題】 端材ストッカに保管する端材が規程保管枚数に達した場合でも、再利用価値の高い端材を優先的に保管して端材ストッカを効果的に利用でき、端材廃棄の無駄をできるだけ低減することができる端材ストッカ管理装置を提供する。
【解決手段】 板材加工機2に併設された端材ストッカ3を管理する装置である。端材ストッカ3の保管枚数が、満杯になるなど、規程保管枚数に達した状態で新たに端材Sが発生したときに、満杯時入庫判別手段24による判別を行う。このとき、保管中の各端材3の評価値、および新たに発生した端材Sの評価値を比較する。新たな端材Sの評価値が高い場合、最も評価値の低い端材Sを端材ストッカ3から排出し、新たな端材Sを端材ストッカ3に入れる。
(もっと読む)
スタッカクレーン
【課題】移載装置から受け渡す荷物の姿勢を確実に正しい姿勢に合わせる。
【解決手段】第1の載置場所と第2の載置場所との間にて荷物の受け渡しを行うスタッカクレーンであって、上記第1の載置場所と上記第2の載置場所とに沿って敷設された軌道上を走行可能な主台車4と、上記主台車4上に設置されるとともに、上記第1の載置場所あるいは上記第2の載置場所との間において上記主台車4の走行方向と直交する水平方向に上記荷物を移動可能な移載装置30と、上記移載装置30を水平面内において回転可能とする回転装置34と、上記移載装置30上における上記荷物の姿勢を撮像することによって取得し、取得した上記荷物の姿勢に基づいて上記主台車4、上記移載装置30及び上記回転装置34を制御することによって上記荷物の姿勢を補正する姿勢補正手段100、200、300とを備える。
(もっと読む)
荷の移載装置及び自動倉庫
【課題】荷を左右両側から荷送りベルトで挟持して移動させるタイプの移載装置において、左右荷送りベルトの間隔調節制御構造を簡易にする。
【解決手段】移載装置は一対の移載ユニット17を備えており、左右移載ユニット17は横送りモータによって互いの間隔が調節される。左右の移載ユニット17には荷送りベルト21が配置されており、荷送りベルト21の前後動と周回とによって荷Wが移動する。荷送りベルト21はばね手段65で荷Wに向けて付勢されている。左右の移載ユニット17には、荷送りベルト21の後退動を検知するセンサ67が前後2カ所の部位に配置されている。一方の移載ユニット17のいずれか一方のセンサ67a,67bがONで、かつ、他方の移載ユニット17のいずれか一方のセンサ67c,67dがONになると、横送りモータが停止する。
(もっと読む)
物品搬送システム
【課題】所望の搬送物品のRFタグに対してデータを適切に読み書きする。
【解決手段】物品搬送システム1において、搬送物品14を第1の搬送物品移動手段7により移動させ、RFタグ16と反射器11との間の距離をアンテナ9から送信される電波の波長の4分の1の奇数倍に設定する。RFタグ16を通過して反射器11に到達する電波の位相と反射器11で反射されてRFタグ16に到達する電波の位相とが一致され、それらを合成した分の送信パワーを持つ電波がRFタグ16に与えられると共に、RFタグ16から送信されて反射器11に到達する電波の位相と反射器11で反射されてRFタグ16を通過してアンテナ9に到達する電波の位相とが一致され、それらを合成した分の送信パワーを持つ電波がアンテナ9に与えられる。
(もっと読む)
1 - 20 / 38
[ Back to top ]