
Fターム[3F027DA05]の内容
Fターム[3F027DA05]に分類される特許
1 - 15 / 15
精密鋳造用ハンガーコンベアの制御方法および制御装置
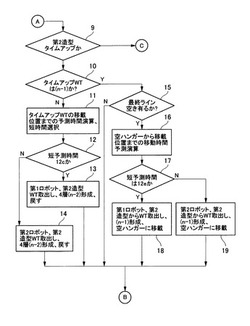
【課題】ロボットの待機時間の縮小。
【解決手段】コンベアは、温湿度が調節された乾燥室内に設置される最終ライン用コンベアと、その前段側に配置され第2造型ライン用コンベアとを有し、双方の移動方向を正逆転可能に構成している。最終ライン用コンベア、および、造型ライン用コンベアから、ロボットが次の耐火物層を形成するためにタイムアップしたワックスツリーWTを移載位置で取出す際に、ワックスツリーWTが現在の移動方向を継続した時と、移動方向を逆転した時の、移載位置までに到達する時間を双方で予測演算し、予測演算のうちより短い時間の移動方向を選択して、選択された移動方向にワックスツリーWTを移動させる。
(もっと読む)
保持手段駆動装置、その制御方法、及び制御プログラム

【課題】電子部品と工程処理機構の処理位置とが適切かつ良好に接触することが可能な電子部品保持手段の保持手段駆動装置、その制御方法及び制御プログラムを提供する。
【解決手段】制御装置1405は、サーボモータ1403を駆動源として操作ロッド1401を下方駆動させることで、吸着ノズル1101に保持された電子部品3が駆動制御パターンに記憶された動作を実行する位置に到達し、この際の駆動電流を検知する。その後、当該サーボモータ1403の駆動電流値が上昇し始め、当該駆動電流値は電子部品3に加える適切な荷重に相当する所定の基準値に達する。この電流値の状態を、制御装置1405は、サーボモータ1403による操作ロッド1401の下方駆動が適正に行われている、すなわち、適切に電子部品が工程処理と接触していると判断する。
(もっと読む)
搬送設備
【課題】本発明は、簡単な構成で、自走台車のエンジン位置をトロリ装置の車体のエンジン取付位置に自動同期させることができる搬送設備を提供することを目的とする。
【解決手段】トロリ装置3に設けた、進み検出用反射板58と遅れ検出用反射板60を、自走台車15に設けた光電スイッチ31,33により検出し、進み検出用反射板58のみが検出されると自走台車15を減速し、遅れ検出用反射板60のみが検出されると、自走台車15を加速する。この構成により、自走台車15をトロリ装置3に同期することができ、この際にトロリ装置3の走行速度を計測し、自走台車15に通信する必要がなく、また自走台車15からトロリ装置3に何ら通信する必要はなく、設備を簡略化することができる。
(もっと読む)
搬送装置
【課題】安価な検出スイッチを用いてワークの端部の位置を特定することが可能な搬送装置を提供する。
【解決手段】検出手段は物体の移動方向に並置された第一および第二の検出スイッチを有する。制御手段は第一の検出スイッチが物体を検出したときに動力手段を停止させる。判定手段は第一の検出スイッチが物体を検出したのち第二の検出スイッチが物体を検出していない状態が所定時間以上継続した場合に物体が所定位置に停止したと判定し、第一の検出スイッチが物体を検出したのち所定時間以内に第二の検出スイッチが物体を検出した場合に物体が所定位置を超えたと判定する。
(もっと読む)
ベルト搬送装置
【課題】エンドレスベルトの停止位置を正確に測定できるベルト搬送装置を提供する。
【解決手段】駆動プーリ10によって所定方向に所定量送られて停止するエンドレスベルト14と、搬送物が載置されることのない領域に穿設された所定形状の透孔と、エンドレスベルト14の送りが停止したとき、エンドレスベルト14の引張側14aとなる所定位置に位置する前記透孔を挟むように設置され、投光部18aと、受光部18bとから成るセンサ18と、受光部18bでの今回の受光量と前回受光した受光量との偏差値を、エンドレスベルト14の今回送り量に加味して次回送り量を設定し、エンドレスベルト14の送り量を次回送り量となるように、駆動プーリ10を制御する制御部22とを具備することを特徴とする。
(もっと読む)
伸縮式移載装置
【課題】移載部に設置すべきセンサの配線に起因する断線、パーティクルの問題が発生しない伸縮式移載装置を提供する。
【解決手段】基台1に対して移載部5が水平方向に進出後退する伸縮式移載装置30であって、この移載部5に設置すべきセンサ6A、6Bを無線式とし、このセンサ6A、6Bに電源を供給する充電池7を移載部5に備え、この移載部5が待機位置にあるときに、充電池7を充電する非接触充電手段8を基台1に備えた。
(もっと読む)
加熱炉へのスラブ装入方法
【課題】 ウォーキングビーム式加熱炉へのスラブ充填率の向上を図ることを目的とする。
【解決手段】 ウォーキングビーム式加熱炉に複数のスラブを連続的に装入して加熱するに当たり、先行スラブと後行スラブの間隙Lを下記(1)式によって定めることとするものである。
L=(ΔW1+ΔW2)/2+α・・・・・(1)
ここに、
ΔW1:先行スラブの装入時温度と該スラブの抽出設定温度から算出される先行スラブの幅方向熱膨張量
ΔW2:後行スラブの装入時温度と該スラブの抽出設定温度から算出される後行スラブの幅方向熱膨張量
α:ウォーキングビーム式加熱炉の最小スラブ間隔
(もっと読む)
インライン集卵方式における卵の処理方法
【課題】 例えば、卵の供給量が低下した場合に発生する洗浄不良や乾燥不良等の問題点を抑制することのできるインライン集卵方式における卵の処理方法を提供する。
【解決手段】 分配整列装置5の入口側近傍に設けられた卵供給量検出手段7にて集卵コンベア4から供給されてくる卵の供給量を検出するとともに、前記検出された単位時間当たりの卵の供給量が制御手段8内に予め設定された規定値を下回った場合、前記検出された卵の供給量に応じた処理能力となるよう、自動選別包装装置6のコンベア(図示せず)の搬送速度を自動制御するようにした。
(もっと読む)
物品状態検出装置
【課題】搬送方向の長さが互いに異なる複数種のパレットを搬送対象とするような場合であっても、パレットに載置された状態で搬送される物品の状態を検出することが可能となる物品状態検出装置を提供する。
【解決手段】搬送手段1により載置搬送されるパレットPに載置された物品Aの状態を検出する物品状態検出装置であって、搬送経路中の検出作用位置においてパレットP上に物品Aが存在しているか否かを検出する物品存否検出手段2、搬送経路中のパレット検出位置においてパレットPが存在しているか否かを検出するパレット存否検出手段3、搬送距離を検出する搬送距離検出手段4夫々の検出情報に基づいて、物品AがパレットPの搬送方向前端よりも前方側に突出する前方突出長さ、及び、物品AがパレットPの搬送方向後端よりも後方側に突出する後方突出長さを求める演算手段5を備える。
(もっと読む)
搬送制御プログラム格納記憶媒体
【課題】位置情報に品質情報、物品名情報、経過時間情報等の情報を付随させ、物品の移動と同時にすべての情報も移動を行い、逐一内容確認および判定を可能とする搬送制御プログラム記憶媒体の提供。
【解決手段】多様な情報を持たせるため、部品や商品等の搬送物を搬送する搬送装置の搬送位置情報を管理する搬送位置管理手段と、前記搬送物の搬送物移動位置情報や前記搬送物の品質情報や物品名情報等の搬送物情報を管理する搬送物管理手段と、搬送装置の任意位置に存在し品質に対して判別する判別機構において任意条件に適合した際に品質情報を任意値に設定する判定制御手段と、搬送装置の前記判別機構以降に存在する任意の作動機構に対して品質情報に対応させた作動となるように制御する作動制御手段を備えた搬送制御プログラムを格納させた搬送制御プログラム格納記憶媒体を構成している。
(もっと読む)
画像処理を用いた制御システム
【課題】 生産ラインにおけるベルトコンベア等搬送装置上の部品の数は生産状況に応じて変化し、この変化に応じて搬送装置の速度を調整しなければならない。従来は作業者がその都度速度設定値を再設定していたが、常に生産ラインを監視しなければならない等手間がかかるという課題を解決する。
【解決手段】 搬送装置上の部品を撮影し、この画像情報から部品の到達距離や密集度などの特徴量を抽出して、この特徴量に基づいて搬送装置の速度設定値を求めて、速度コントローラに設定するようにした。自動的に搬送装置上の部品の状況に応じて速度を変化させることが出来る。
(もっと読む)
物品検査装置
【課題】 搬送停止時における検査ヘッド内からの被検査物の直接の取り出し作業が不要で、清掃等をも容易に行なうことのできる物品検査装置を提供する。
【解決手段】 被検査物Wを搬送しながら検査する物品検査装置であって、被検査品Wを所定の搬送路長Lを有するコンベア搬送路により搬送する搬送速度制御可能な搬送手段と、これにより搬送される被検査品Wが通過する所定の検査空間領域内で被検査品を検査する検査手段と、搬送手段の搬送速度を可変制御する搬送速度制御手段33aと、寸動実行のための操作入力部7を有し、搬送速度制御手段33aと協働して搬送速度を検査手段による検査時の搬送速度より低速に指定し、かつ、その低速での搬送を操作入力部7への操作入力に対応する搬送時間だけ実行させ、搬送手段を操作入力毎に寸動させる寸動制御手段33cとを備える。
(もっと読む)
搬送物品の位置決め装置
【課題】 本発明の目的は、搬送方向の寸法が異なる物品が多種類であっても、物品毎に高い精度で位置決めを行うことができるほか、物品の種類に関わらず共通の可動ストッパにより物品の位置決めを行うことができる搬送物品の位置決め装置の提供にある。
【解決手段】 物品を一方から他方へ向けて搬送する搬送機構と、前記物品の搬送方向の寸法を認識する寸法認識手段と、前記物品の搬送方向と同方向へ移動自在であって、かつ前記物品を停止させる可動ストッパ25と、前記可動ストッパ25を移動させるストッパ移動手段20を備え、前記可動ストッパ25の停止位置は前記寸法認識手段の認識結果に対応して設定される。
(もっと読む)
多連計量装置
【課題】 実際の稼動状況に応じた制限条件下で、計量できる物品の範囲を拡大するとともに、品質の安定した検査を行うことができる多連計量装置を提供する。
【解決手段】 物品を搬送しながら、その重量値を計量する計量コンベアを物品の搬送方向に直列に複数備えた多連計量装置であって、前記物品の単位時間当たりの計量処理個数である処理能力と、前記物品の搬送方向における物品長と、を設定する設定手段と、
該設定手段により設定された処理能力及び物品長に基づき、前記計量コンベアの運転条件となる変動パラメータを算出する変動パラメータ算出手段と、該変動パラメータに基づき、前記複数の計量コンベアのうち前記物品の重量を計量する計量コンベアを選択する計量コンベア選択手段と、を備えることを特徴とする。
(もっと読む)
荷物移動アクチュエータのためのシステムおよび方法
荷物搬送システムにおける荷物移動アクチュエータ(104)のコントロールのためのシステム、方法およびコンピュータプログラムコードが提供される。これは例えばその目的地または進路等である荷物の所望の特性を定めること、および、荷物アクチュエータをコントロールするための複数のストラテジーを評価および採点すること、および、荷物(102)を動かすストラテジー(300)を所望の荷物特性に応じて選択することを含む。  (もっと読む)
(もっと読む)
1 - 15 / 15
[ Back to top ]