
Fターム[3F027DA12]の内容
Fターム[3F027DA12]に分類される特許
1 - 20 / 83
物品の供給方法
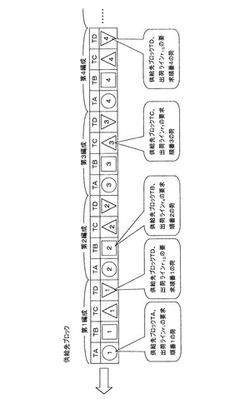
【課題】 複数の供給元ブロックにある多数の荷を一本の本流コンベアによってその下流にある複数の供給先ブロックへ要求順番通りに供給するとともに、各供給先ブロックに平等に1個ずつ同時並行的に且つ一定時間間隔に供給する。
【解決手段】 4基のストレージコンベアからなる供給元ブロックと、3基の出荷ラインからなる供給先ブロックとを一本の本流コンベアでもって連絡し、本流コンベアから出荷ラインへの移載装置を備え、コンピュータのプログラムとメモリーを使って本流コンベアの中間に仮想K点を設定し、各供給元ブロックのストレージコンベアと供給先ブロックとの対応性を記憶し、各供給先ブロックから選別された出荷ラインで複数のライン組を設定して記憶し、ライン組から同じ要求順番の荷を選択して仮想K点を通過する仮想荷列を作定し、ストレージコンベアの切出しと移載装置の移載を作定の荷列となるようにコンピュータCOMで制御する。
(もっと読む)
リニアコンベア

【課題】位置補正用データの管理負担を伴うことなく搬送台車を高い精度で位置決めする。
【解決手段】リニアコンベアは、複数の電磁石ユニット26を含み、電磁石ユニット26毎に個別に通電制御が可能なリニアモータ固定子7と、永久磁石44からなるリニアモータ可動子8及び位置補正用データが記憶されたRFタグ55をそれぞれ備える複数のスライダ4と、各電磁石ユニット26の通電制御を個別に行う複数のモータコントローラCと、RFタグ55の情報を読み取るリーダライタ60と、を備える。各モータコントローラCはそれぞれ、リーダライタ60が読み取った各スライダ4の位置補正用データを記憶しておき、スライダ4を目標位置で停止させる際には、対象となるスライダ4の位置補正用データを用いて目標停止位置を補正し、この補正後の目標停止位置に基づいて電磁石ユニット26への通電制御を行う。
(もっと読む)
鋼板の精整ライン搬送方法
【課題】退避位置に鋼板を退避させ、また搬送経路を変更することもできる鋼板の搬送方法の提供。
【解決手段】剪断後の鋼板を搬送する精整ラインであり、第1渋滞判定ゾーンの鋼板占有率がA%未満の場合は第2搬送テーブル列に鋼板を搬送し、第1渋滞判定ゾーンの鋼板占有率がA%以上で且つ、第1搬送テーブル列の後方に設定された第2渋滞判定ゾーンの鋼板占有率がB%以上の場合は第1仮置場に鋼板を仮置し、第1渋滞判定ゾーンの鋼板占有率がA%以上、第2渋滞判定ゾーンの鋼板占有率がB%未満且つ、第2トランスファー以降第2搬送テーブル列前方に設定された第3渋滞判定ゾーンの鋼板占有率がC%以上の場合は第2仮置場に鋼板を仮置し、第1渋滞判定ゾーンの鋼板占有率がA%以上、第2渋滞判定ゾーンの鋼板占有率がB%未満且つ、第3渋滞判定ゾーンの鋼板占有率がC%未満の場合は第2搬送テーブル列に鋼板を搬送する。
(もっと読む)
物品搬送装置
【課題】 第1搬送コンベア装置上を複数列で搬送されてくる物品を、第2搬送コンベア装置にて一列に配列変換して搬送する際に、物品同士が接触することなく移し替えることができる物品搬送装置を提供すること
【解決手段】 ランダム状態の物品を複数列で搬送する第1搬送コンベア装置1と、その第1搬送コンベア装置の搬出側に、所定の空間をおいて搬送方向が交差するように配置し、物品を1列に並べて搬送する第2搬送コンベア装置2と、空間に配置し、第1搬送コンベア装置から搬出される物品を受け取ると共に、第2搬送コンベア装置に渡す第3搬送コンベア装置3とを備える。第3搬送コンベア装置は、第1搬送コンベア装置上を搬送する複数列の物品の列毎に設け、列ごとに独立して速度制御を行うようにした。
(もっと読む)
容器供給装置
【課題】上流の搬送コンベヤからその入口コンベヤを経由して前記容器処理機器へ容器を供給する容器供給装置において、入口コンベヤ上で容器処理機器に供給されつつある容器の密着量を所定量に維持しつつも、密着容器に変形或いは損傷を与えない。
【解決手段】上流の搬送コンベヤ7からその入口コンベヤ6を経由して容器処理機器5へ容器Bを供給する容器供給装置である。入口コンベヤ6上で容器処理機器5に供給されつつある容器B相互間の密着量を検知できる容器センサ9が設けられている。制御装置10は、容器センサ9によって検知した容器密着量に応じて搬送コンベヤ7の搬送速度(容器供給量)を制御する。
(もっと読む)
コンベア装置、集合型ゾーンコントローラ、並びにゾーンコントローラ
【課題】搬送物を一まとめにすることが可能であり、且つモータとゾーンコントローラの必要個数を減少させることができるコンベア装置、集合型ゾーンコントローラ、並びにゾーンコントローラを提供することを課題とする。
【解決手段】コンベア装置120は、ゾーンAA〜ACが搬送方向に直列に配置されたものである。ゾーンAA〜ACは、集合型ゾーンコントローラ101で制御される。ゾーンAA〜ACは、各々通常のものよりも搬送ローラ5の本数が多く、全長Lが長いので、主たる搬送物を、間隔を開けて3個載置することができる。存荷センサーSa〜Scは、それぞれゾーンAA〜ACの最も末端の位置にある。集合型ゾーンコントローラ101では、複数の搬送物を適度の間隔を設けて一まとめにする動作を各ゾーンの在荷センサーSa〜Scの信号と、プログラム上のタイマーの組み合わせによって実現している。
(もっと読む)
物品の収納設備
【課題】本発明は、容器の種類によって必要な出荷数の容器に物品を収納させるための物品の収納設備を提供することを目的とする。
【解決手段】物品の収納設備10は、容器12a,12b,12c,12dの移送および待機をおこなう第1の移送手段14、容器12a,12b,12c,12dを物品16の収納位置まで移送する第2の移送手段18、第1の移送手段14から第2の移送手段18に容器12a,12b,12c,12dを供給する容器供給手段20を備える。
(もっと読む)
外形検出システム
【課題】搬送装置によって所定方向へ搬送される対象物の外形を検出すること。
【解決手段】対象物Mを所定方向Dへ搬送する第1搬送装置110と、第1搬送装置110の設置位置よりも所定方向Dへ間隔を置いて配置されて、第1搬送装置110によって搬送されてきた対象物Mが受け渡されて所定方向Dへ搬送する第2搬送装置120と、第1搬送装置110と第2搬送装置120との間において、第1搬送装置110及び第2搬送装置120の各搬送面よりも低い位置に配置されて、所定方向Dと直交する方向に並ぶ縞模様が上面に設けられた板体130と、板体130の上方において、第1搬送装置110及び第2搬送装置120の各搬送面よりも高い位置に配置されて、所定方向Dと直交する方向に延びる撮像領域を撮像する撮像装置140と、撮像装置140が撮像した画像データに基づいて、対象物Mの外形を検出する外形検出装置200とを備える。
(もっと読む)
郵便物処理装置及び郵便物処理方法
【課題】大きさ、厚さ、重さが多種多様な郵便物を途切れずに一通ずつ搬送して処理することが可能な郵便物処理装置及び郵便物処理方法を提供する。
【解決手段】郵便物Pを一通ずつ送る一通送り部11と、連続して配置されるバッファ10及び9と、一通送り部11及びバッファ10の満杯を検知する量検知センサ15c及び15bと、バッファ10内の郵便物を一通送り部11へ搬送する搬送ベルト13bと、バッファ9内の郵便物をバッファ10へ搬送する搬送ベルト13aとを有する郵便物処理装置の郵便物処理方法であって、量検知センサ15cにより一通送り部11の満杯が検知されていない場合、搬送ベルト13bに郵便物を一通送り部11に搬送させ、量検知センサ15bによりバッファ10の満杯が検知されていない場合、搬送ベルト13aに郵便物をバッファ10に搬送させる。
(もっと読む)
容器搬送装置
【課題】多数のボトルを一列に連続的に搬送する際、複数のボトルが連続搬送状態になったときに先頭のボトルに過大な押圧力が作用するのを抑制する。
【解決手段】ラベル装着システム1のラベラー2には複数のコンベア31A,31B,31C,…を一列に配置して多数のボトルBをラベラー2に供給するラベル搬送装置3が設けらる。コンベア31Aには各ボトルBのラベラー2への供給タイミングを調整するスクリュー4が設けられ、このスクリュー4の上流側に複数のボトルBを連続搬送状態にするボトル蓄積区間が設けられている。コンベア31A〜31Cのうち、コンベア31Bは順逆両方向に搬送方向が切換可能なコンベアで構成される。ボトル蓄積区間のボトルBの連続搬送状態の数が所定数以上なると、コンベア31Bの搬送方向を逆方向に切り換え、コンベア31B上のボトルBに上流側方向の押圧力を発生させることで、連続搬送状態の先頭のボトルBに作用する押圧力を低減する。
(もっと読む)
フリーフローコンベヤにおけるセンサーユニット
【課題】接点の継断時の電気的スパークが発生することないため、クリーンルーム内を高いクリーン度に保つことができ、製品の品質を保った状態で搬送することが可能なフリーフローコンベヤを提供する。
【解決手段】各センサーユニット21a・21b、23a・23b、一腕部に検知回転体31が回転可能に支持されると共に他腕部の両側に作動部27aが設けられ、軸29を中心に搖動するように支持された搖動アーム27、搖動アーム27を、常には中立位置に付勢して上記検知回転体を製品に当接可能にする弾性部材35、搖動アーム27の各作動部27a側に設けられ、搖動アーム27の搖動に伴って移動する作動部27aにより検知信号を出力する一対の無接点型センサ37,39、から構成する。
(もっと読む)
コンベヤを用いた物品の分岐合流設備
【課題】 コンベヤの短い区間において物品の分岐合流を混在させて制御し、物品の流れを効率的に行い、物品の分岐合流の設備を小型化する。
【解決手段】 メインコンベヤ1の左側に分岐させる支流ラインLnと合流させる合流の支流ラインLsとを交互に配置し、隣り合う支流ラインLn,Lsの間にスタッカークレーンの入出庫ターミナルを設け、自動倉庫と入出庫ターミナルとの間をスタッカークレーンで走行させて物品を入出庫させ、メインコンベヤ1の物品を載置する位置を示す仮想上の仮想載置帯9に分岐と合流用仮想空間N,Sを交互に割り付け、同仮想空間と載置する物品及びその物品の分岐合流する支流ラインLn,Lsとを対応させ、メインコンベヤ1の送りと同期して仮想載置帯9を繰り出して仮想空間N,Sが対応する支流ラインLn,Lsにくればその物品を支流ラインLnへ又は支流ラインLsからメインコンベヤ1へ移載させるプログラムを備える。
(もっと読む)
搬送品のトラッキング方法及びコンベア搬送装置
【課題】搬送品を高速に搬送させるとき搬送品のトラッキングが正確にできるトラッキング方法を提供することを目的とする。
【解決手段】トラッキング方法は搬送方向に所定間隔で配置された識別コードを複数有する環状コンベアで搬送品を搬送し搬送品をトラッキングする。トラッキング方法は、環状コンベアに載置される前に搬送品に関する情報を順次入力し搬送品の情報レコードを生成する搬送品レコード生成工程(S11)と、搬送品が搬入場所で識別コードを読み取る第1識別コード読み取り工程(S16)と、搬送品が環状コンベア上に載置され搬送品の搬送方向の後端を検知した際に識別コードと情報レコードとを関連付ける関連付け工程(S19)と、搬入場所とは異なる場所で識別コードを読み取る第2識別コード読み取り工程(S20)とを備える。
(もっと読む)
精密鋳造用ハンガーコンベアの制御方法および制御装置
【課題】ロボットの待機時間の縮小。
【解決手段】コンベアは、温湿度が調節された乾燥室内に設置される最終ライン用コンベアと、その前段側に配置され第2造型ライン用コンベアとを有し、双方の移動方向を正逆転可能に構成している。最終ライン用コンベア、および、造型ライン用コンベアから、ロボットが次の耐火物層を形成するためにタイムアップしたワックスツリーWTを移載位置で取出す際に、ワックスツリーWTが現在の移動方向を継続した時と、移動方向を逆転した時の、移載位置までに到達する時間を双方で予測演算し、予測演算のうちより短い時間の移動方向を選択して、選択された移動方向にワックスツリーWTを移動させる。
(もっと読む)
コントローラ、ローラコンベア装置、ローラコンベア装置の制御方法、ならびにプログラム作成支援プログラム
【課題】構成部品の削減が可能であり、制御方法の自由度を向上可能なコントローラ、ローラコンベア装置、ローラコンベア装置の制御方法、ならびにプログラム作成支援プログラムを提供する。
【解決手段】モータを有したローラコンベア装置を、制御可能なコントローラであって、モータ制御基板を有し、モータ制御基板は、ロジック内蔵ドライバ14と、書き換え可能なメモリ16と、CPU16とを有する。CPU16と、書き換え可能なメモリ16とを有したモータ制御基板は、略コンピュータである。よって、PLC等の外部の制御装置、ならびにPLCを収納する制御盤を削減できる。
(もっと読む)
アキュムレーションコンベヤ
【課題】簡易な構成で、搬送物間の距離を好適に縮小して、アキュムレーション効率及び搬送効率を向上させる。
【解決手段】アキュムレーションコンベヤ10は、ゾーンZごとに設けられ、該ゾーンZを構成するキャリヤローラ18を回転駆動するモータ20と、ゾーンZごとに設けられ、搬送物Pの通過を検知するセンサ22と、センサ22により検知された隣り合う2つの搬送物の検知情報に基づいて、搬送物の間の距離に関する距離情報を推定し、その推定された距離情報が所定範囲内の場合に、上流側後方の搬送物が搬送されているゾーンZの搬送速度が、ゾーンZの下流側に隣接するゾーンZの搬送速度に対して相対的に速くなるように、ゾーンZのモータ20又はゾーンZのモータ20への制御入力を切り替える制御手段26と、を備える。
(もっと読む)
搬送経路決定方法及び自動搬送システム
【課題】搬送元と搬送先との間で最適な搬送経路を設定することができる搬送経路決定方法及び自動搬送システムを提供する。
【解決手段】 自動搬送システム1は、各自動搬送設備を制御する制御盤7〜11と、管理コンピュータ12とを備えている。管理コンピュータ12は、コストテーブルが格納・記憶されたデータベース18と、各搬送設備の基本動作性能に応じた基準設備コストと各搬送設備の現在の稼動状況に応じた加重値とを乗算することで、各搬送設備の現在設備コストを算出し、コストテーブルにセットすると共に、経路No.毎に各搬送設備の現在設備コストを加算して搬送コストを算出し、コストテーブルにセットするコストテーブル更新部19と、搬送元と搬送先とが一致する複数の経路(搬送経路候補)のうち搬送コストが最も小さい搬送経路候補を搬送経路として選択する搬送経路設定部20とを有している。
(もっと読む)
土砂搬送システム
【課題】土砂の搬送効率を向上させることが可能な土砂搬送システムを提供すること。
【解決手段】土砂5を搬送する搬送装置1と、任意の位置に配置され搬送装置1上に土砂5を投入する複数の投入装置3と、各投入装置3の土砂5の投入開始予定時刻Wsを設定する土砂投入管理装置4とを備え、土砂投入管理装置4は、投入予定時間Tsと到達時間Uとに基づき各投入装置3の投入開始予定時刻Wsを算出する算出部45と、当該算出結果に基づき各投入装置3の投入開始予定時刻Wsを設定する投入開始予定時刻処理部46Aとを有し、各投入装置3は、搬送方向上流側から搬送されてくる土砂5の有無を検知する搬送土砂検知センサ33と、当該検知結果に基づき、投入開始予定時刻Wsを含む所定の時間帯に搬送装置1上に土砂5が有るか否かを判定し、土砂5が搬送装置1上に無いと判定したときに土砂5を投入する投入決定処理部35Cとを有すること。
(もっと読む)
物品供給装置
【課題】包装機への物品送出タイミングに一時的遅れが発生する場合の物品搬送処理を良好に行う。
【解決手段】駆動モータ7により走行駆動される複数の搬送コンベヤ3のうち包装機に向けて物品9を供給するタイミングに遅れが生じた際に包装機と第一搬送コンベヤC0,C1とを停止させる。第一搬送コンベヤC0,C1より上流側に配設された第二搬送コンベヤC2〜C6のうち特定の搬送コンベヤC2,C3が物品9を受け入れる際に、特定の搬送コンベヤC2,C3の上流側に隣接する搬送コンベヤC4〜C6で搬送される物品9の検知に基づき、特定の搬送コンベヤC2,C3を物品略一つ分ずつ搬送するよう間欠的に走行駆動して物品9を貯留し、包装機が運転可能な状態となり、特定の搬送コンベヤC2,C3への物品貯留数が所定数を越える時に、第一搬送コンベヤC0,C1の走行を再開させて、物品9を第一搬送コンベヤC0,C1に向けて搬送する。
(もっと読む)
搬送コンベア合流部貨物衝突防止システムおよびその方法
【課題】本流コンベアと、これに追加的に接続される支流コンベアからなる2系統の搬送コンベアを同時に稼働させつつ、両系統の貨物をスムーズに合流させることのできる搬送コンベア合流部貨物衝突防止システムを提供する。
【解決手段】それぞれが独自の回転速度によって回転駆動することのできる複数のローラによって構成される速度可変コンベア22を本流コンベア12と支流コンベア14に設け、本流コンベア12に設置される第1のセンサ16と、支流コンベアに設置される第2のセンサ18とから受信する各コンベア上の貨物の通過時刻情報を使用して、上記各ローラの回転駆動を個別制御する。その結果、支流コンベアから搬送された貨物は、速度可変コンベア22上で搬送速度を変化させられ、合流部において、本流コンベア12上を流れる貨物との衝突が回避される。
(もっと読む)
1 - 20 / 83
[ Back to top ]