
Fターム[3F027FA16]の内容
Fターム[3F027FA16]に分類される特許
1 - 20 / 34
部品搬送装置
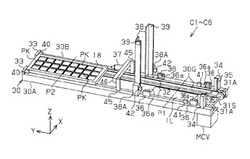
【課題】トレイに載置された電子部品の載置状態の検出を、迅速かつ適切に行うことのできる部品搬送装置を提供する。
【解決手段】トレイ検査装置は、トレイ18に載置されたICチップの載置状態を検査する。トレイ検査装置は、トレイ18を待機させる待機位置P1及びトレイ18との間でICチップの給排を行う作業位置P2の間でトレイ18を往復移動させるトレイ搬送装置C1〜C6と、トレイ搬送装置C1〜C6によるトレイ18の搬送路に設けられるとともに、トレイ18の幅に対応する検出範囲を有してICチップの載置状態を非接触にて検出するラインセンサー46と、ラインセンサー46による検出情報に基づいてICチップの載置状態の適否を判定するトレイ状態判定部とを備える。
(もっと読む)
缶体搬送状態異常検出装置

【課題】缶体の搬送状態の誤検出をなくして、搬送状態の異常を確実に検出することができる缶体搬送状態異常検出装置及び缶体搬送状態異常検出方法を提供する。
【解決手段】缶体搬送状態異常検出装置1は、コンベア21に載置されて下流側に搬送される缶体3の搬送状態を判定し、前記コンベア21の搬送速度に対応した基準信号Pを出力する基準信号出力部13と、前記缶体3の搬送状態を監視し、前記缶体3の搬送状態を示す搬送信号S1を出力する搬送状態監視部12と、前記搬送状態監視部12から入力された前記搬送信号S1に基づいて前記缶体3の搬送状態の異常を検知すると、前記搬送信号S1および前記基準信号Pに基づいて、異常が検知された前記搬送信号S1の直近の所定期間内で異常と判定された時間の積算時間が所定時間を超過している場合に、前記缶体3の搬送状態が異常であると判定する異常搬送判定部11と、を備える。
(もっと読む)
搬送設備
【課題】搬送用姿勢での被保持部から前後方向の一方側の端部までの長さが異なる複数種の物品を搬送装置にて搬送した場合に、その複数種の物品の種類を判別ことができる搬送設備を提供する。
【解決手段】搬送装置3が、搬送用姿勢での被保持部5から前後方向の一方側の端部7までの長さが異なる複数種の物品1,2を搬送するように構成し、被保持部用設定位置Aに被保持部5が位置して物品用設定位置Bに位置する物品1,2を検出する物品検出手段と、物品検出手段にて検出された物品に検出作用してその物品の前後方向の一方側の端部7を検出する端部検出手段12と、物品検出手段の検出情報と端部検出手段12の検出情報とに基づいて物品1,2の種類を判別する判別手段とを設ける。
(もっと読む)
基板搬送装置
【課題】基板の搬送方向の曲がりを搬送しながら補正する基板搬送装置を提供する。
【解決手段】コロによって基板を搬送する基板搬送装置であって、載置された基板を搬送し、基準速度で回転するコロと、基準速度に対して加減速された速度で回転するコロで構成される複数の搬送コロと、前記搬送コロを備えた複数のコロ軸と、前記コロ軸を回転駆動させる駆動用モータと、搬送中の基板の曲がりを検知するセンサーと、前記センサーからの出力信号によって基板の曲がり度合いを検出する基板曲がり検出装置と、前記基板曲がり検出装置からの出力信号を得て、前記搬送コロの内、基準速度に対して加減速された速度で回転するコロの回転速度を調整するための調整用モータを制御する制御装置と、前記調整用モータの回転によってコロの回転速度を加減速させる差動装置を備え、基板の搬送中の曲がりを補正することを特徴とする基板搬送装置。
(もっと読む)
容器搬送装置
【課題】多数のボトルを一列に連続的に搬送する際、複数のボトルが連続搬送状態になったときに先頭のボトルに過大な押圧力が作用するのを抑制する。
【解決手段】ラベル装着システム1のラベラー2には複数のコンベア31A,31B,31C,…を一列に配置して多数のボトルBをラベラー2に供給するラベル搬送装置3が設けらる。コンベア31Aには各ボトルBのラベラー2への供給タイミングを調整するスクリュー4が設けられ、このスクリュー4の上流側に複数のボトルBを連続搬送状態にするボトル蓄積区間が設けられている。コンベア31A〜31Cのうち、コンベア31Bは順逆両方向に搬送方向が切換可能なコンベアで構成される。ボトル蓄積区間のボトルBの連続搬送状態の数が所定数以上なると、コンベア31Bの搬送方向を逆方向に切り換え、コンベア31B上のボトルBに上流側方向の押圧力を発生させることで、連続搬送状態の先頭のボトルBに作用する押圧力を低減する。
(もっと読む)
位置決め装置
【課題】パレットの製作精度などの影響を受けることなく、一定枚数積み重ねられた金属板の水平方向の位置決めを精度良く行うことができる位置決め装置の提供を目的とする。
【解決手段】位置決め装置1は、一定枚数の金属板6が積み重ねられ載置されたパレット61を搬送するローラコンベア2、このローラコンベア2の上流側及び下流側に配設され、パレット61を移動させる一対の移動手段3、ローラコンベア2を昇降させる昇降手段4、及び、金属板6の角度及び位置を計測するための計測手段5などを備え、計測手段5の計測した角度及び位置にもとづいて、移動手段3がパレット61を移動させ、金属板6を位置決めする。
(もっと読む)
物品検査装置
【課題】センサ側の調整手段で閾値を変更できず、制御側でワークの品種に対応して適切な閾値を設定して計量データの確度等を保証する。
【解決手段】計量装置は、搬送されるワークWをセンサ6で検出し、センサ6の検出信号に基づくタイミングでワークWの重量を計量する。投光部と受光部からなるセンサは通過したワークの遮光状態に応じたアナログの遮光信号を出力する。ワークWの品種によって波形が異なる遮光信号からワークWを的確に検出するための閾値1又は2を表示部で視認しながら設定する。遮光信号と閾値から得た出力をワークを検出したタイミング信号とし、これによってワークの計量タイミングを適切に管理する。
(もっと読む)
搬送システム
【課題】搬送システムにおいて、物品の転倒容易度を正確に得る。
【解決手段】搬送システムは、物品Wを搬送するシステムであって、搬入コンベア3と、速度制御部45と、第2光電センサ13と、判定部49とを備えている。搬入コンベア3は、物品Wを載置して移動する。速度制御部45は、物品Wを載置して移動中の搬入コンベア3の速度を制御する。第2光電センサ13は、減速時の物品Wの挙動を検出する。判定部49は、第2光電センサ13によって検出された物品Wの挙動に基づいて転倒容易度を判定する。
(もっと読む)
搬送体の姿勢判定装置、および姿勢判定方法
【課題】より簡単な構造で搬送体の姿勢を識別できる搬送体の姿勢判定装置を提供する。
【解決手段】搬送体1に電磁誘導方式のRFIDタグ3を装着する。搬送路に臨んで、タグリーダー4とタイミングセンサー5を配置する。タグリーダー4に、同じ周波数の通信波を送受する2個のアンテナ13・14と、アンテナ制御部を設ける。各アンテナ13・14の通信距離は大小に異ならせてある。タイミングセンサー5が搬送体1を検知したときの検知信号に基づき、通信距離が大きなアンテナから順に各アンテナ13・14を作動させる。各アンテナ13・14におけるRFIDタグ3の反射波の信号強度を信号判定部19で判定する。信号判定部19の判定結果の組み合わせを主制御部20で判定して、搬送体1の搬送姿勢が正常であるか否かを識別する。
(もっと読む)
物体の向き検出システム
【課題】簡易かつ安価で正確に物体の姿勢を検出できる物体の向き検出システムを提供することを目的とする。
【解決手段】測定対象物30の両面にはRFタグユニット20a,20bが取り付けられている。RFタグユニット20a,20bは、それぞれRFタグ21a,21bと高透磁率シート22a,22bと電磁波遮断シート23a,23bとが順に積層されている。RFタグリーダ10の送信信号生成部11で生成された送信信号は、アンテナ13から電磁波として放射される。受信信号判定部12は、RFタグ21a,21bからの応答の有無に基づいて、測定対象物30のいずれの面がRFタグリーダ10のアンテナ13側を向いているのか判定し、うつ伏せ状態を検出する。
(もっと読む)
コンベアシステム
【課題】上流から供給される荷物を複数のコンベアのいずれかに振り分ける際に、振り分け先を的確に判定することのできるコンベアシステムを提供すること。
【解決手段】第一コンベア50と第二コンベア60とを備えるコンベアシステム10であって、第一コンベア50または第二コンベア60に送り出される荷物の形状を示す情報を取得し、取得した情報から、荷物の形状と所定の形状との近さの度合いを示す定形度を算出する定形度算出部25と、定形度算出部25により算出された定形度に基づいて、荷物を第一コンベア50または第二コンベア60のいずれに送り出すかを判定する分岐制御部40と、分岐制御部40の判定結果に従って、荷物を第一コンベア50および第二コンベア60のいずれか一方に送り出す分岐装置45とを備える。
(もっと読む)
出荷設備
【課題】出荷ラインからケースを取り出し移載する作業者の作業性を向上でき、トラックブースの幅を狭くすることを可能とした仕分け出荷設備を提供する。
【解決手段】物品Rが搬送される搬送ライン11から出荷先別に仕分けられた物品Rを搬送する出荷ライン13を備え、出荷ライン13は、物品Rの搬送方向とは直角方向Bの作業通路15側端部から、前記直角方向Bの物品Rの作業通路15側端部を突出させて搬送する構成とされている。この構成によれば、作業者Eは、出荷ライン13の端部から物品Rの端部が突出されていることにより、物品Rを取り出すとき、物品Rの端部を下から手で支えることができ、物品Rを出荷ライン13より取り出しやすくでき、作業性を向上できる。
(もっと読む)
棒鋼の整列積上装置
【課題】複数の棒鋼を互いに整列して積み上げるに際し、綾状結束による不良品の発生を確実に防止でき、装置の構造が簡素で低コストで且つ少ないスペースにより設置できると共に、操作も容易な棒鋼の整列積上装置を提供する。
【解決手段】複数の棒鋼bをほぼ径方向で且つ水平方向に沿って順次搬送する第1コンベアC1と、該第1コンベアC1の終端側における外側且つ水平に終端側が突出し、上記棒鋼bを搬送するチェーン(搬送帯)V2の表面が該第1コンベアC1の棒鋼bを搬送するチェーン(搬送帯)V1の表面よりも低く、且つ上側のチェーンV2が水平に配置された第2コンベアC2と、を含み、係る第2コンベアC2のチェーンV2の搬送速度Yは、第1コンベアC1のチェーンV1の搬送速度Xよりも低いと共に、少なくとも第2コンベアC2の終端側におけるスプロケット(車輪)S3の直径は、第1コンベアC1の終端側におけるスプロケット(車輪)S1の直径よりも小径である、棒鋼の整列積上装置1。
(もっと読む)
ウォーキングビーム上のコイル異常検出方法およびコイル異常検出構造
【課題】ウォーキングビーム上のコイルがコイル先端部を周辺設備に引っ掛けて、転倒等を起こす前に、そのコイル異常を検出することができるウォーキングビーム上のコイル異常検出方法およびコイル異常検出構造を提供する。
【解決手段】ウォーキングビーム20により搬送されるコイル10がその先端部を周辺設備に引っ掛けたコイル異常を検出するために、コイル10の先端部が周辺設備に接触した際のコイル10の水平面内での回転挙動に追随してウォーキングビーム20が水平面内で旋回できるようにしておき、ウォーキングビーム20の水平面内での旋回動作を近接センサ25で検知することによって、当該コイル異常を検出する。
(もっと読む)
パイプコンベア
【課題】循環走行する帯状搬送ベルトをパイプ状に丸め、該パイプ内に被搬送物を包み込んで搬送するパイプコンベアにおいて、石炭等の被搬送物によるパイプコンベアの破損を生じることなく、該被搬送物を円滑に搬送することが可能なパイプコンベアを提供する。
【解決手段】帯状搬送ベルト1の被搬送物の受部から、該ベルトの側端部が重なる地点に至るまでの任意の位置に、該帯状搬送ベルトの搬送面の上方より、支持部材7により該搬送面に対して垂下される部材であって、被搬送物と共に走行する長尺状の異物と接触してその向きを搬送方向に揃える流れ調節部材8を設置する。
(もっと読む)
ロール状ペーパーの製造方法
【課題】所定幅のロール状ペーパーを適切な姿勢で搬送させるロール状ペーパーの製造方法を提供する。
【解決手段】長尺のロール状ペーパー42を切断して所定幅のロール状ペーパー41とする切断工程46の後に、所定幅のロール状ペーパー41が予め定められた適切な姿勢にて搬送される場合には所定幅のロール状ペーパー41と接触せず、所定幅のロール状ペーパー41がそれ以外の不適切な姿勢にて搬送される場合には所定幅のロール状ペーパー41と接触するように、所定幅のロール状ペーパー41の搬送経路22の上方を横断する感知手段2を用いて、所定幅のロール状ペーパー41が適切な姿勢で搬送されるように所定幅のロール状ペーパー41の姿勢の修正を促し、所定幅のロール状ペーパー41を適切な姿勢にて次工程へと搬送する検知工程47を有する。
(もっと読む)
物品の方向転換装置及び方向転換方法
【課題】物品の姿勢を搬送途中で方向転換させる場合において、その方向転換させた物品の姿勢が所望の姿勢に対してずれを生じるようなときには、そのような姿勢のずれが後続の物品において生じないように自動的に修正することができる物品の方向転換装置及び方向転換方法を提供する。
【解決手段】箱Bが跨って載ることができるように並列に配置された左右両搬送コンベア28a,28bの速度を箱Bの搬送方向に対する姿勢を回転させて方向転換させ得る速度差がつくように設定し、その箱Bの搬送方向に対する姿勢を搬送経路の途中の検出位置で検出し、その検出結果に基づき、箱Bの姿勢が所望の姿勢でない場合は、検出位置で姿勢を検出された物品及びその物品に後続して搬送される物品のうち少なくとも一方の物品の姿勢が方向転換終了時点において所望の姿勢に適合するように、予め設定されている各搬送コンベア28a,28bの速度設定内容を補正する。
(もっと読む)
物品搬送システム
【課題】所望の搬送物品のRFタグに対してデータを適切に読み書きする。
【解決手段】物品搬送システム1において、搬送物品14を第1の搬送物品移動手段7により移動させ、RFタグ16と反射器11との間の距離をアンテナ9から送信される電波の波長の4分の1の奇数倍に設定する。RFタグ16を通過して反射器11に到達する電波の位相と反射器11で反射されてRFタグ16に到達する電波の位相とが一致され、それらを合成した分の送信パワーを持つ電波がRFタグ16に与えられると共に、RFタグ16から送信されて反射器11に到達する電波の位相と反射器11で反射されてRFタグ16を通過してアンテナ9に到達する電波の位相とが一致され、それらを合成した分の送信パワーを持つ電波がアンテナ9に与えられる。
(もっと読む)
ガラス搬送装置及びその制御方法、並びに車両の製造方法
【課題】ガラスを精度よく取付位置まで搬送することができるガラス搬送装置、ガラス搬送装置の制御方法、及び自動車の製造方法を提供すること。
【解決手段】本発明の一態様にかかるガラス搬送装置は、自動車100のガラスをその取付位置まで搬送するガラス搬送装置である。ガラスを保持する吸着治具60と、吸着治具60を移動させるための関節52を有するアーム機構50と、吸着治具60で保持したリアガラス2bを、ボディ101形状に応じた仮想ガイドGrに沿って移動させるよう、アーム機構50を制御する制御部80とを備えている。フロントガラス2aの取付位置の高さを記憶し、取付位置の高さに応じて仮想ガイド高さを算出し、仮想ガイド高さの仮想ガイドGrに沿って、リアガラス2aを移動させている
(もっと読む)
タグ通信装置
【課題】システムの肥大化やコスト増を招くことなく、物品の向きを把握しつつ、物流業務の効率化が図れるタグ通信装置を提供する。
【解決手段】物品の天側及び地側にRFIDタグを予め貼付しておき、物品を搬送するベルトコンベアに沿ってリーダライタを設置し、物品の天地方向に送信する電波のビームをスキャンさせる。リーダライタはRFIDタグからIDを受信し、その受信した際のスキャン角とIDとから物品の天地を判定する。
(もっと読む)
1 - 20 / 34
[ Back to top ]