
Fターム[3F029AA01]の内容
物品の積み重ね及び付属装置 (962) | 目的、機能 (169) | パタニングを行うもの (110)
Fターム[3F029AA01]の下位に属するFターム
搬送路で姿勢を変更 (10)
載置体上で姿勢を変更 (11)
同種物品 (59)
異種物品 (18)
Fターム[3F029AA01]に分類される特許
1 - 12 / 12
荷役装置及び荷役方法
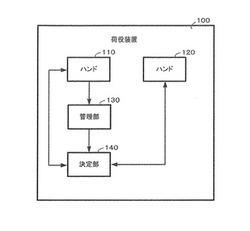
【課題】同一のパレットに対して複数のロボットハンドをアクセスさせる構成を備えながら、ロボットハンド同士が接触しないように、かつ作業速度を向上させることができる荷役装置及び荷役方法を提供する。
【解決手段】パレット上の複数のアクセス位置に対して、ワークの荷役を行う荷役装置であって、前記パレット上の前記複数のアクセス位置に順次アクセスする複数のハンドと、前記複数のハンドのうちの第1のハンドのアクセス位置を管理する管理部と、前記第1のハンドの前記アクセス位置に応じて前記複数のハンドのうちの前記第1のハンドとは異なる第2のハンドの移動経路を決定する決定部とを備える。
(もっと読む)
検品装置、検品システム、検品方法及びプログラム

【課題】 多くのコストをかけることなく、(1)品名の特定、及び(2)数量の計算、の2つの作業を人手によらずに自動化して行うことが可能な技術を提供する。
【解決手段】 検品装置は、撮影された画像である撮影画像に対し、荷物画像の特徴量でマッチングを行うことで荷物の品名を特定する品名特定手段と、前記特定された品名に基づいて、荷物の積み付け方法を特定し、前記特定した積み付け方法に基づいて荷物の数量を計算する数量計算手段と、を含む。
(もっと読む)
幅寄せ装置、パレタイズ搬送システムおよびパレタイジング方法
【課題】小型且つ低コストの装置によって、効率的にワークの幅寄せ作業を行う。
【解決手段】本発明の幅寄せ装置1は、パレット2上に載置された複数のワークWを、パレット2上にて密着整列させる幅寄せ装置1である。この幅寄せ装置1は、一対の幅寄せ体3,4と、押さえ体8とを備える。一対の幅寄せ体3,4をそれぞれ前進させて複数のワークWを押し込み、且つ、押し込まれるワークWとは反対側に配列される他の複数のワークWに対して、その側方から押さえ体8を当てておく。これにより、パレット2上にて複数のワークWを密着整列させる。
(もっと読む)
積み付け装置およびこれを備える搬送設備
【課題】従来より簡易かつ安価な積み付け装置およびこれを備える搬送設備を提供すること。
【解決手段】搬送路3から搬送される荷物WをパレットPに積み付ける積み付け装置2であって、前記荷物Wを把持および解放する把持部9と、前記搬送路3と前記パレットPとの間で前記把持部9を移動させるとともに、前記パレットPに対する前記把持部9の高さを調整する移動機構4,8と、前記把持部9に取り付けられ、前記把持部9の下方に配された前記荷物Wに対する距離を検出する検出部10とを備え、前記把持部9は、前記検出部10の検出結果に応じて、前記移動機構4,8によって前記パレットPに対する高さが調整されるように構成されていることを特徴とする。
(もっと読む)
ロボットハンド及びそれを用いたパレタイジング装置
【課題】粒状物を充填した不定形袋のパレタイジングにおいて、高い積載効率を確保するとともに荷崩れを起こしにくい積付け山を形成できるようにする。
【解決手段】パレタイジング装置のロボットアーム先端側に取り付けられて不定形袋50をワーク支持手段12で支持しながら積載スペース内に積付けてパレタイジングを行うロボットハンド10であって、そのワーク支持手段12は横向きにした不定形袋50を下から支えて持ち上げるための複数本のフォーク12a,12b,12c,12dをロボットハンド前面下端側から前方に突出した状態で横方向に並列して有しており、両端のフォーク12a,12dの間で少なくとも1本以上のフォーク12b,12cが上面を両端のフォーク12a,12d上面よりも高い位置で設けられて正面視山形のフォーク配置とされており、不定形袋50を中央部が弧状に持ち上がった状態で支持しながら積付けを行うものとした。
(もっと読む)
パレタイザ
【課題】順次供給される複数品種のワークを品種毎にパレタイズするパレタイザにおいて、簡単な構成により、複数のパレットのパレット交換のタイミングの重なりを時間を抑制し、効率的なパレタイズを実現する。
【解決手段】パレタイザ1は、ワークWを品種毎に仕分けして一時保管するバッファ部2と、バッファ部2からパレットPにワークWを移載するロボット3と、ロボット3を制御する制御部4とを備え、制御部4は、ロボット3による移載作業毎に、積載ワーク数Nと満杯ワーク数Mとから各パレットP毎に残ワーク数R=(M−N)を求め、残ワーク数Rと1回当たりのワークの移載に要する移載時間Δtとに基づいて各パレットP毎の積載完了までの残積載時間Tr=Δt×Rを求め、うち少なくとも1つのパレットPの残積載時間Trがパレット交換作業に要する既定のパレット交換時間Tよりも短くなることがないように移載作業を行うパレットPを選択する。
(もっと読む)
船積み計画作成方法および船積み計画作成プログラム
【課題】汎用のコンピュータを用いたとしても、多品種の輸送対象製品を一つの船倉に積み込むときの船積み計画を短時間で作成することができる船積み計画作成方法を提供すること。
【解決手段】複数種類の長尺の輸送対象製品を複数の段積み製品群に分けて一つの船倉に積み込むときの荷姿および配置をコンピュータで作成するにあたって、複数種類の輸送対象製品それぞれの属性情報と船倉の深さに係る情報とにもとづいて、複数種類の輸送対象製品の各々を複数の輸送対象製品群に分類し、かつ輸送対象製品群の各々での輸送対象製品の段積み順を定めて、複数の段積み製品群それぞれの荷姿を作成する荷姿作成ステップと、複数の段積み製品群の各々の平面視上の形状および大きさと船倉の底面の形状および大きさに係る情報とにもとづいて、複数の段積み製品群の船倉内配置を作成する船倉内配置作成ステップとをコンピュータに実行させる。
(もっと読む)
安全なアクセスを組み合わせたパレット輸送装置
【課題】小型の装置であってパッケージ機械とパレタイザとを一体化した装置を改良すること。
【解決手段】装置は、上記パレット輸送ステーションへのアクセスを提供するドア(7)が設けられた同一の筐体(1)内に配置されており、製品(8)をパッケージする機械(2)と、ロボット式のパレット輸送ステーションと、で構成されている。この装置は、ロボットのグリップヘッド(7)の移動を制限空間内に集めるために、上記閉鎖した筐体1)内における上記ロボット(15)の運動範囲を制限する手段を備え、制限空間は、筐体(1)内であってドア(7)の近傍に位置する無形バリアから測定された最小距離に応じて規定された安全空間と重ならない。ロボット(15)の運動範囲を制限するこれら手段は、電動タイプのカムであって当該カムが上記ロボットの操縦制御部の制御下で上記ロボット(15)のロボットの主軸no.1回りにおける運動範囲を制御し、また、ロボットの運動速度を低減する。
(もっと読む)
木材搬送装置
【課題】構造の簡素化を図り、製造コスト及びメンテナンスコストの軽減を実現し得る木材搬送装置を提供する。
【解決手段】木材2の長手方向に離間した少なくとも2つの部位を個別に保持する保持手段8を備え、当該保持手段8は、前記木材2をその長手方向と直角な方向から挿入可能な間隔で配設されると共に互いに平行を成す一対の棒状の保持部材13,13を有し、当該一対の保持部材13,13を、各保持部材13,13に平行な軸線Yを中心に一体的に回動可能に構成した。
(もっと読む)
荷積みプラン作成方法及びそのプログラム
【課題】トラックなどに積み込む段ボール箱などの荷物の効率的な荷積み計画を可能にする。
【解決手段】挿入可能な最も大きい荷物グループを選択し(S5,S10)、48通りの全ての挿入方法を試行した結果、最も積載効率の高い挿入方法を決定するために挿入後最大サブ空間を求める(S9,S17)。以後、これを繰り返すことにより、各荷物の積み込み位置、その回転状態及び積み込み順序を含む荷積みプランを作成する(S20)。
(もっと読む)
複層ガラス製品の出荷・配送システムおよび方法
【課題】納入先の要求に合わせて生産された複層ガラス製品を、顧客側での保管・仕分け等のスペース、そのための工数を低減することのできるように、出荷および配送するシステムおよび方法を提供する。
【解決手段】サーバコンピュータ1は、複層ガラス製品の納入先の使用単位情報または/および使用順序情報を含む受注情報に従って、この受注情報に含まれる各オーダを、所定の属性ごとに振り分けて同一属性ごとのグループを作成し、各グループに対して、所定の出荷用物流具およびこの出荷用物流具へ積み付ける積み付け順序を含む積み荷明細情報を作成する。サーバコンピュータの作成した積み荷明細情報に基づいて、所定の出荷用物流具に積み付けられた複層ガラス製品を、出荷・配送する。
(もっと読む)
棒状対象物を取り扱う方法及び装置
本発明は、第一に、装填支援手段、特にカートンに関連する装填過程の際に、例えば乳製品産業に用いるべく、ほぼ棒状の対象物、特にプラスチックカップのようにばらばらにすることができるように堆積された複数の物品からなるポールを取扱うための完全に自動化し得る方法を提案する。取扱うべき対象物は製造機械又は処理機械から第1幾何学的配置へと供給される。本発明によれば、最初に対象物の少なくとも一部が捕捉され、次に対象物の相対配置が変更され、次に対象物の変更された対象物の配置が装填支援手段に供給され、その時、対象物は直立姿勢で配置されることを特徴とする。このようにして対象物の装填支援手段への最適パッキング密度を達成することができる。本発明は上記方法を実施するのに適した装置にも関する。 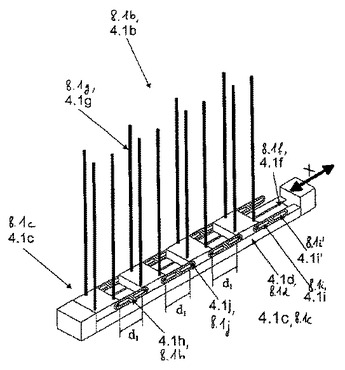 (もっと読む)
(もっと読む)
1 - 12 / 12
[ Back to top ]