
Fターム[3F033CA03]の内容
ローラコンベア搬送用ローラ (2,155) | ブレーキ (21) | ローラ軸にブレーキ (3)
Fターム[3F033CA03]に分類される特許
1 - 3 / 3
コンベアおよびコンベア用の調整ローラ
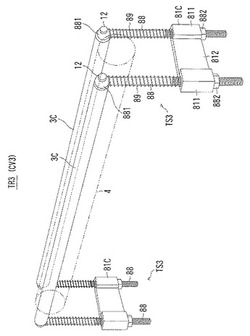
【課題】ブレーキローラを用いたコンベアにおいて、重量の小さなワークであっても止まってしまうことのないようにすること。
【解決手段】コンベアフレームに設けられたローラの上をワークが重力によって搬送されるように構成されるコンベアであって、ローラとして、少なくとも1つのブレーキローラ4が設けられ、ブレーキローラの少なくとも上流側の近辺には、ワークが載っていないときにはブレーキローラの上面よりも高い位置に上面が位置しワークが載ったときにはその重力に応じて上面が下降するように、弾性部材89によって上面の高さ位置が可変調整される小径ローラ3Cを有する調整ローラTR3が設けられており、ワークの重力に応じて小径ローラ3Cの上面の高さ位置が変化し、これによってワークがブレーキローラ4の上面に接触しまたは接触しないように構成される。
(もっと読む)
コンベア装置

【課題】簡素な構成によりコストの増大を抑制しながら、キャリアをストレージする際における先頭キャリアのストッパーとの衝突時及び停止している先行キャリアとの衝突時の衝撃を小さくすることができるとともに搬送能力を上げることができるコンベア装置を提供する。
【解決手段】被搬送物Wを支持するキャリア2を傾斜ガイドレール3に沿って重力により自走させるコンベア装置1において、キャリア2の搬送方向の全長L1に対する一部L2に搬送方向に延びる被制動面(被制動用ロッド4)を設け、摩擦ローラ7に遠心ブレーキ8を連結して制動手段5とし、制動手段5,5,…をキャリア2の搬送方向の全長L1と同じ間隔で搬送経路に沿って配設し、前記被制動面に制動手段5の摩擦ローラ7を圧接してキャリア2を制動する。
(もっと読む)
コンベヤ
【課題】荷役対象物の有無を正確に判断することが可能なコンベアを提供する。
【解決手段】無人搬送車両200は、コンベア100の近傍まで荷役対象物Wを搬送し、当該荷役対象物Wをコンベア1の複数のローラー2上に載置する。このとき、自動荷役車両200のストラドルレッグ212は、ストッパ駆動手段3のレバー4に接触する。それにより、当該レバー4が移動(回動)することによって、ストッパ駆動手段3の連結部5を介してストッパ6が、ローラー2の上方まで起き上がる。これにより、自動荷役車両200により載置された荷役対象物Wは、自重により複数のローラー2上を移動することなく、ストッパ6により停止される。したがって、センサにより荷役対象物Wの有無を所定時間内に検出することが可能となる。
(もっと読む)
1 - 3 / 3
[ Back to top ]