
Fターム[3F072AA06]の内容
Fターム[3F072AA06]の下位に属するFターム
容器 (364)
農産物(果実、野菜、卵等) (22)
加工食品(パン、菓子等) (33)
タバコ、シガレット (11)
電気部品、電子部品 (156)
自動車(ボディ、パネル) (23)
パレット、台車 (16)
ストッパとの係合部を有するもの
ボルト形状物 (17)
孔あき部品(リング、ナット) (13)
コイルばね、スプリング (2)
吊持物(ハンガー、電極板等) (2)
長尺物(棒、管等) (15)
球状物 (4)
円柱、円筒状物 (65)
板状物 (89)
積層体 (17)
袋状物 (31)
錠剤、カプセル (18)
ボビン
コイル (1)
瓦、タイル (1)
Fターム[3F072AA06]に分類される特許
1 - 20 / 126
ターンテーブル装置および搬送設備
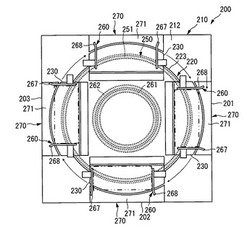
【課題】搬送する物品の大きさの変更に対応する。
【解決手段】第1ターンテーブル装置200は、食パンXA1を受け入れる入口201と、食パンXA1を送り出す第1出口202および第2出口203と、鉛直な回転軸回りに回転自在に設けられ、入口201で受け入れた食パンXA1を載せて第1出口202または第2出口203まで搬送するテーブル230と、このテーブルに載せて搬送中の食パンXA1の側面を案内するサイドガイド267,268を備える。サイドガイド268は、回転軸の同心円の接線方向に移動可能な構成であり、テーブル230に載せた食パンXA1を側方へ押して上流のラインにおける食パンXA1の搬送基準とは異なる基準で下流のラインへ送り出すことを可能にする。
(もっと読む)
物品搬送方法及び物品搬送装置

【課題】物品や容器のサイズ或いは容器内への物品の詰め合わせ状態などに応じた複数の物品の供給形態に対応可能な物品搬送方法及び物品搬送装置を提供する。
【解決手段】所定間隔毎に搬送される物品搬送コンベヤ2上の複数の物品1を吸着手段で吸着し、所定間隔毎に搬送される容器搬送コンベヤ4の第一コンベヤ5上の容器3に各物品1を載置して該容器3と共に搬送する際に、指定手段により第一の制御プログラムに切り替えられた状態では複数の物品1の夫々に対応した位置に配備された吸着具が各物品1を夫々吸着してまとめて容器3の一つに載置し、また、指定手段により第二の制御プログラムに切り替えられた状態では物品1を夫々吸着している吸着具の間隔を容器搬送コンベヤ4の第一コンベヤ5上の複数の容器3の間隔に合わせて該複数の容器3に夫々の物品を載置する。
(もっと読む)
製品回収装置
【課題】製品を搬送帯から回転テーブルに簡単且つ安定して受け渡すことができる製品回収装置を提供することを課題としている。
【解決手段】回転駆動される搬送帯11の駆動力入力部9と、回転駆動自在に支持される回転テーブル21の駆動力入力部26とを連係手段29によって連係し、連係手段29を介して前記搬送帯11及び前記回転テーブル21の駆動を行う1つのアクチュエータ12によって前記搬送帯11と前記回転テーブル21の両方を駆動し、搬送帯11によって搬送される製品43を、回転テーブル21に受け渡して回収する。
(もっと読む)
物品搬送装置
【課題】任意の間隔や向きで搬送されてきた物品を高速に搬送する。
【解決手段】物品認識手段により得た物品10の位置に関する情報に基づき、物品10を吸着する順序を定めて回転体20の回転中にアーム32を該情報に応じた回動角度で回動させて物品10を吸着具34で吸着する。物品10の向きに関する情報に基づき、物品10が載置位置Xにおいて特定の方向に向くように吸着具34を回転させて、物品10を載置位置Xを載置する。
(もっと読む)
物品搬送装置
【課題】任意の間隔で搬送されてきた物品を高速で搬送する。
【解決手段】物品認識手段により得た情報に基づき、回転体20の回転中にアーム32を回動させて吸着予定の物品10に対向する吸着位置Uにおいて該物品10を吸着具34で吸着するに際して、上昇位置と下降位置との間の中途範囲において吸着予定の物品10)の斜め上方から前記吸着位置Uを含む下降位置付近に向けて該吸着具34を吸引しながら下降させ、該下降位置付近にて中途範囲よりも吸着具34を遅く下降させるようにアーム昇降モータを変速制御して、物品10を吸着する。
(もっと読む)
ピッキングシステム
【課題】作業効率の向上を図ること。
【解決手段】カメラ3が、コンベアの搬送路上を撮像し、制御装置5が、カメラ3によって撮像された画像に基づいて搬送路上のワークを検出するとともに、検出したワークの保持動作をロボット2a,2bに対して指示し、ロボット2a,2bが、制御装置5からの指示に従って保持動作および移動動作を行う。特に、制御装置5は、カメラ3によって撮像された画像の画像領域を分割した分割領域ごとに、分割領域に属するワークに対する保持動作の実行をかかる分割領域に対応するロボット2a,2bに対して指示する。
(もっと読む)
ピッキングシステム
【課題】ワークの取りこぼしを防止すること。
【解決手段】ロボット2が、コンベアによって搬送されるワークを保持する保持動作および保持したワークを所定の場所へ移動させる移動動作を行い、メインカメラ3aが、搬送路上の領域を撮像し、制御装置5が、メインカメラ3aによって撮像された画像に基づいて搬送路上のワークを検出するとともに、検出したワークの保持動作をロボット2に対して指示する。また、制御装置5の重なり検出部514が、ワークの重なりを検出し、制御装置5の動作指示部515が、重なり検出部514によってワークの重なりが検出された場合に、重なったワークの保持動作をロボット2に対して指示する。
(もっと読む)
ピッキングシステム
【課題】作業効率の向上を図ること。
【解決手段】カメラ3が、コンベアの搬送路上を撮像し、制御装置5が、カメラ3によって撮像された画像に基づいて搬送路上のワークを検出するとともに、検出したワークの保持動作をロボット2a,2bに対して指示し、ロボット2a,2bが、制御装置5からの指示に従って保持動作および移動動作を行う。特に、制御装置5は、カメラ3によって撮像された画像に基づいてワークの向きを検出し、検出したワークの向きに対応するロボット2a,2bに対してかかるワークの保持動作を指示する。
(もっと読む)
ピッキングシステム
【課題】複数のワークを向きを揃えて載置する場合に、複数のワークの保持を短時間で行うこと。
【解決手段】ロボット2a,2bは、ワークwを保持する複数の保持部23a,24a,23b,24bと、アーム先端部21a,21bに対して回転可能に設けられ、複数の保持部23a,24a,23b,24bを支持する支持部22a,22bとを備える。また、制御装置は、保持部23a,24a,23b,24bを用いて保持したワークwごとに、かかるワークwの向きが所定の向きとなるように支持部22a,22bを所定量回転させたうえでかかるワークwを所定の場所へ載置する載置動作の実行をロボット2a,2bに対して指示する。
(もっと読む)
ピッキングシステム
【課題】作業効率の向上を図ること。
【解決手段】複数のカメラ3a,3bが、コンベアの搬送路上の異なる領域をそれぞれ撮像し、制御装置5が、カメラ3a,3bによって撮像された画像に基づいて搬送路上のワークを検出するとともに、検出したワークの保持動作をロボット2a,2bに対して指示し、ロボット2a,2bが、制御装置からの指示に従って保持動作および移動動作を行う。特に、制御装置5は、ワークの保持動作を、カメラ3a,3bによって撮像される領域ごとに対応付けられたロボット2a,2bに対して指示する。
(もっと読む)
物品の装備用機械
【課題】高い柔軟性と良好な近接性とを有する、物品の装備用の簡単かつコスト的に有利な機械を提供する。
【解決手段】少なくとも1つの回転体1と、回転体の周縁に配置された、物品40の装備用の少なくとも1つの独立したラベル貼付装置30と、物品40の位置正確な供給および搬出用の同期駆動可能な搬送要素3、4、5、6とを備える、容器などの物品40の装備用機械である。回転体1の周縁には、回転体1用の少なくともラベル貼付装置30の相対位置を決定するための要素21、22、23が存在する。
(もっと読む)
搬送装置
【課題】被搬送物を複数の搬送路に分岐又は複数の搬送路から合流させながら搬送する搬送装置であっても、迅速に被搬送物を搬送することができる搬送装置を提供すること。
【解決手段】旋回テーブル2を旋回動作及び昇降動作を同期して行うようにした上段旋回テーブル21及び下段旋回テーブル22で構成し、上段旋回テーブル21及び下段旋回テーブル22が下降した第1旋回位置T1にあるときに、上段旋回テーブル21と第1の搬送路11、下段旋回テーブル22と第2の搬送路12がそれぞれ接続され、上段旋回テーブル21及び下段旋回テーブル22が上昇した第2旋回位置T2にあるときに、上段旋回テーブル21と第3の搬送路13、下段旋回テーブル22と第1の搬送路11がそれぞれ接続されるようにする。
(もっと読む)
搬送装置
【課題】予め決定された軌道に沿って移動する移動部を有する搬送装置において、残留振動を抑制し、移動に要する時間を最小化することのできる搬送装置を提供する。
【解決手段】移動部2を駆動するための駆動部31とワークを載置できる負荷部32、移動部の加速時、定速時および減速時の各軌道情報を生成する軌道情報生成部5と、軌道情報生成部により生成される軌道情報に基づいて駆動部を作動させるコントローラ4とを備える。軌道情報生成部は、駆動部のエネルギ変換効率に関する効率情報記憶手段、移動部の移動に関する特有情報記憶手段、移動部の移動条件情報記憶手段、移動部の運動特性情報記憶手段、前記運動特性に基づき移動部の残留振動を抑制し、移動部の移動に要する時間を算出する演算手段と、前記演算手段により算出された移動に要する時間をパラメータに含む評価関数の値が最小となる軌道情報を決定する軌道情報決定手段とを備える。
(もっと読む)
包装計量システム
【課題】包装計量システムの長さを抑えつつ、包装機から並列的に排出された複数の対象物を、後段の搬送部において直列的に搬送することが可能な技術を提案する。
【解決手段】包装機1は、包装後の複数の商品100を複数列に配列した状態でX軸方向に沿って並列的に排出する。包装機1から並列的に排出された複数列の商品100は載置部2に載置される。計量機3は、Y軸方向で載置部2と並んで配置された載置面3aを有し、当該載置面3aに載置された複数の商品100のそれぞれを個別に計量する。搬送部4は、載置された商品100をX軸方向に沿って搬送する。搬送ロボットは、載置部2に載置されている複数列の商品100を、列単位で順に計量機3の載置面3aまで移動するとともに、計量機3で計量された列単位の商品100を載置面3aから搬送部4まで移動する。
(もっと読む)
ワーク移載システム
【課題】ワーク供給量のバラツキに関係なく、オーバーフローしないワーク移載システム。
【解決手段】ワーク4を搬送するピックアップコンベア2と、前記ワーク4を載置するためのトレイ5を搬送するプレイスコンベア3と、前記ワーク4を保持および解放して前記トレイ5へ移載する複数台のロボット7と、前記ワーク4および前記トレイ5の位置、形状および数量をそれぞれ検知するセンサと、前記センサからの情報に応じて前記ピックアップコンベア2および前記プレイスコンベア3の搬送速度と前記ロボット7の動作とを制御するコントローラ8とを有するワーク移載システム10において、複数台の前記ロボット7が、前記ワーク4の搬送方向に沿うように配設され、前記センサが、前記ワーク4の搬送方向における前記ロボット7の上流側と、前記トレイ5の搬送方向における前記ロボット7の上流側とに配設されるワーク移載システム。
(もっと読む)
搬送装置、チャック並びに搬送方法
【課題】整列配置の精度が高い、搬送装置、搬送装置に用いられるチャック、並びに搬送方法を提供する。
【解決手段】搬送装置1は、整列搬送機1Aと、チャック1Bとを備える。チャック1Bは、整列搬送機1Aから搬出される処理済みのタコ25が載せられるベルトコンベア19の上方に位置する。長手方向スライド部材29に沿ってスライド可能な横方向スライド部材30が、長手方向スライド部材29に取付けられており、横方向スライド部材30にチャック1Bが取付けられている。長手方向スライド部材29や横方向スライド部材30によってチャック1Bが、撮影画像で把握されたタコ25の位置に移動する。チャック1Bは、閉じた場合に先端がチャック1Bの中心軸線上に位置するよう湾曲した3本の把持爪31を有しており、タコ25の位置に移動してきたチャック1Bは、この把持爪31を閉じてタコ25を把持する。
(もっと読む)
加熱搬送装置及び加熱搬送方法
【課題】上部組立体と下部組立体とのようなワーク同士の組み付け精度が高く、しかも、加熱処理の後にコンタミが再度付着することを防止できる加熱搬送装置及び加熱搬送方法を提供すること。
【解決手段】インデックステーブル45の周囲に設けた保持部57に後端側組立体33を保持し、この状態でインデックステーブル45を回転させて、後端側組立体33の移動経路上に配置された加熱炉51に搬送し、加熱炉51の底面開口部93から後端側組立体33を入れて加熱することにより、後端側組立体33のコンタミを除去する。従って、コンタミを除去した後端側組立体33に対して、他の部品を自動的に組み付ける際には、後端側組立体33の位置精度が高いので、自動機による組付けを好適に行うことができる。また、自動機による好適な組付けが可能であるので、作業者によって後端側組立体33を移送する必要が無く、加熱後にコンタミが再度付着することが無い。
(もっと読む)
物品供給装置
【課題】幅の広い平面(第1の面)を上下にして搬送されてきた物品を、90度回転させて立てた状態で箱詰めするために供給する装置を提供する。
【解決手段】供給コンベヤ4によって、幅の広い面を上下にしてランダムな状態で搬送されてきた物品2を、ロボット10で方向を揃えて取り出し載置プレートに載せる。載置プレートを90度回転させて物品2を幅の狭い面(第2の面)が上下に来るように立ち上げ、各載置プレートの間隔を縮小して物品2を集積した後、製品コンベヤ16に追従して移動するプッシャによってこれら物品2を押し出して前記製品コンベヤ16の収容部14内に挿入する。
(もっと読む)
物品ハンドリング装置
【課題】物品を順次搬入する物品搬入コンベアから物品を取り上げ、物品受け止め部に積み込むという作業を能率良く遂行することができる物品ハンドリング装置を提供する。
【解決手段】物品ハンドリング装置10において、複数の物品1を順次搬入する物品搬入コンベア11から、移載ロボット12の第1ピッキングヘッド13と第2ピッキングヘッド14が交互に物品1を1個ずつ吸着し、第1物品受け止め部16または第2物品受け止め部17に積み込む。第1ピッキングヘッド13と第2ピッキングヘッド14を独立して三次元移動させる制御装置15は、第1ピッキングヘッド13と第2ピッキングヘッド14の一方が物品搬入コンベア11から物品受け止め部16、17に向かい、他方が物品受け止め部16、17から物品搬入コンベア11に向かうとき、相互を安全距離に保つ。
(もっと読む)
ワーク搬送方法および装置
【課題】姿勢矯正手段を用いる必要なしに、ワークを常に適正に、かつ十分強固に把持して、所期した通りの姿勢で所定の作業ステーションまで、ワークを常に確実に搬送することができるワーク搬送方法を提供する。
【解決手段】中空もしくは中実の軸部3と、軸部3の中間部に設けられたフランジ部4とを具え、基準面1上に載置されるワーク2の、フランジ部4を基準面1と直交する向きに押圧して、該フランジ部4の周面を基準面1上に線もしくは面接触させて、前記軸部3の中心軸線を基準面1に平行にした状態で、開閉駆動される一対のフィンガー12,12により、ワーク2のフランジ部4の周面を把持して、該ワーク2を所定の作業ステーションまで搬送する。
(もっと読む)
1 - 20 / 126
[ Back to top ]