
Fターム[3F072AA07]の内容
Fターム[3F072AA07]の下位に属するFターム
Fターム[3F072AA07]に分類される特許
1 - 20 / 209
物品搬送装置
容器の処理装置
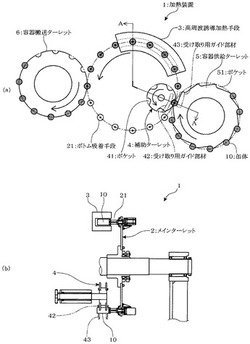
【課題】処理の品質や効率等を向上させる事が出来る容器の処理装置の提供を目的とする。
【解決手段】容器の処理装置の加熱装置1は、缶体10に加熱処理を施す高周波誘導加熱手段3へ缶体10をボトム吸着手段21に吸着させて供給するメインターレット2、缶体10をメインターレット2に供給する容器供給ターレット5、及びメインターレット2の受け取り領域に設けられた補助ターレット4を有し、補助ターレット4が、受け取り領域において、缶体10のボトム吸着手段21へのセンターリングを行う構成としてある。
(もっと読む)
ロータリー式充填装置

【課題】異径缶兼用で、缶の剛性によって缶を保持する力の調整が容易な円形断面容器の搬送方法および装置を提供する。
【解決手段】ロータリー式フィラで液体が充填された缶1を次工程へ搬送するコンベヤに排出するように作用する固定加速アーム21と、固定の軸を支点として、閉時は固定加速アーム21側へ缶を挟んで保持するように作動し、開時は固定加速アーム21側から開かれて缶の保持を開放するように作動する揺動可能な可動アーム31とで搬送装置を構成し、固定加速アーム21の缶との係合面を取り扱う缶の最小径に相当する曲面にして、取り扱う缶の直径が大きい場合は該曲面の2点で接するようにし、可動アーム31の缶と係合する側が湾曲状で、取り扱う缶の直径が大きい時も小さい時も係合する箇所が可動アーム31の先端部近辺になるようにする。
(もっと読む)
容器搬送装置
【課題】容器6の首部を把持して複数の回転手段間を順次受け渡して搬送する容器搬送装置で、小型容器6Aと大型容器6Bに兼用できるように、搬送中に容器6の搬送間隔を変更する。
【解決手段】48πピッチでグリッパ26が配置された搬入搬送ホイール22と、30πピッチでグリッパ60が配置された搬出搬送ホイール58の間に、48πピッチから30πピッチに容器6の搬送間隔を変更する縮小搬送手段(第1変換ホイール30)と、48πピッチから60πピッチに容器6の搬送間隔を拡大する拡大搬送手段(第2変換ホイール32)とを並列に配置し、搬入搬送ホイール22によって搬送されてきた容器6を、切換カム38によって縮小搬送手段30と拡大搬送手段32のいずれかに振り分けて受け渡す。
(もっと読む)
搬送物のトレーサビリティシステム及び連繋回転式搬送設備並びにその運転方法
【課題】簡単なシステムにより搬送履歴情報を搬送物毎に管理できるようにする。
【解決手段】周部に複数の搬送物保持手段を設けた回転式搬送装置9を複数並べて、搬送物を互いに受渡し連繋搬送する連繋回転式搬送設備10を構成し、連繋回転式搬送設備10による搬送途中で搬送物夫々に個別記号を付ける印字装置11を設け、印字装置11により個別記号が付けられた各搬送物と、その搬送物を受け取った複数の回転式搬送装置9の搬送物保持手段夫々の情報を繋げる情報連繋処理手段12を設け、情報連繋処理手段12からの連繋履歴情報をデータベース化して保存する記憶手段13を設け、搬送物の個別記号を基に記憶手段13から連繋履歴情報を引き出し可能な個別情報アウトプット手段14を設けてある。
(もっと読む)
自動調理システム
【課題】クレープ生地の製造を連続してなすこともできる自動調理システムを提供する。
【解決手段】鍋1を回転自在に保持するアームAを間歇回転駆動する間歇回転駆動機構10と、間歇回転駆動機構10の間歇回転駆動に連動して鍋1を反転させるとともに反転させられた鍋を元に戻す鍋姿勢変更機構20と、間歇回転駆動機構10の間歇回転駆動に連動して鍋1を通常の姿勢と反転姿勢とに維持する鍋姿勢維持機構30と、間歇回転駆動機構10の間歇回転駆動に連動して鍋蓋を開閉する鍋蓋開閉機構40と、鍋1を予熱する鍋予熱機構50と、鍋を加熱して調理する鍋加熱機構60とを備えてなる自動調理システムである。
(もっと読む)
グリップ式物品搬送装置
【課題】物品を高速に搬送することができ、また、高速に経路を分けて下流側に搬送することができ、装置全体も小型に形成することのできるグリップ式物品搬送装置を提供すること。
【解決手段】回転体9に周方向等分配置されているとともに、物品Wを把持する開閉自在なグリップフィンガ21を有する複数の物品グリッパ20と、各物品グリッパ20のグリップフィンガ21を開閉駆動するカム面22sを有するとともに軸方向に移動自在な円錐カム22とを備えたグリップ式物品搬送装置1において、円錐カム22を径方向および軸方向の少なくとも一方に複数配置したことを特徴とする。
(もっと読む)
回転円板式の物品供給装置
【課題】底部に突起部を有するなどして、底部を下にして真っ直ぐに立てることが難しいフランジ付きの物品をその底部を下した姿勢で整列させることができる回転円板式の物品供給装置を提供する。
【解決手段】回転円板15と回転容器7が反時計回りの方向へ回転する。回転容器7内の食品容器Cは、回転円板15の乗り移りポイントPにおいて旋回トラック11へ乗り移る。切欠き13の幅寸法Nは食品容器Cの本体C1の最大の直径D1より僅かに大きく、フランジC3の直径D2より小さい寸法に設定されているので、底部を下側にした姿勢の食品容器Cのみが切欠き13に落ち込み、且つフランジC3が切欠きの縁に掛かった状態で係止されて保持されて、整列される。
(もっと読む)
自動検査装置の容器供給装置
【課題】供給コンベアで多数容器を供給スターホイール等へ供給する高速処理タイプの容器供給装置において、容器転倒やブリッジを生じることのない新規な容器供給装置を提供する。さらに、容器供給を任意に停止できるゲート部材を容器供給装置にもうける。
【解決手段】検査装置の容器供給装置において、供給コンベア上に設けられた容器供給方向に向かって搬送幅を狭く規制する左右一対のガイド部材により、供給コンベア上の容器をスターホイールに供給して装填する。スターホイールと供給コンベアの間に、前記容器をスターホイール外周に案内する案内通路を設けた供給案内部材を、前記供給コンベアの搬送方向と交差する方向に移動自在に設け、案内通路を開閉するゲート部材を供給案内部材に設ける。
(もっと読む)
移送装置
【課題】より小さな所要スペースしか必要としない択一的な移送装置を提供する。
【解決手段】マンドレルホイール3と移送ホイール11とが、それぞれ互いに平行な回転軸線3’,11’を中心にして回転駆動されていて、その周辺の範囲にそれぞれ対象物1のための保持装置5,7を有しており、保持装置5と、マンドレルホイールの回転軸線との間隔が可変であり、マンドレルホイール3と移送ホイール11とは、対象物が搬送装置4から移送ホイール11を介して保持装置5へ引き渡され得るように互いに隣接して配置されており、移送ホイール11の保持装置7が、それぞれ移送旋回アーム12を介して旋回軸線13を中心にして旋回可能に取り付けられており、該旋回軸線が、移送ホイールの回転軸線11’に対して平行に延びており、さらに各保持装置7の旋回軸線13が、回転軸線11’に対して同一の不変の間隔を有している。
(もっと読む)
容器搬送装置
【課題】回転部分のブッシュの摩耗を抑え、メンテナンスの手間とコストを抑える。
【解決手段】グリッパ20を開閉するためにカム15や開度増大装置17のカム部201、スプリング80から押圧力や引張力が作用すると、その押圧力や引張力によるモーメントは、シャフト部材90を介してスライドブッシュ60に主に作用し、シャフト部材91にはほとんど作用しない。また、スライドブッシュ60もグリッパ20の中心線上に配置されているため、偏荷重が作用しにくい。さらに、スライドブッシュ60は、容器100を保持するグリッパ20の外周側端部20aから最も離れた、内周側端部20bに位置している。
(もっと読む)
キャップ割出し機構
【課題】本発明は、搬送軌道上を搬送されてくるキャップ間境界位置からずれない位置にストッパが挿入されるようにして、キャップに傷付き等の損傷を与えることがないキャップ割出し機構を提供する。
【解決手段】本発明に係るキャップ割出し機構は、搬送軌道上を搬送されてくるキャップが搬送軌道の下流側に設けられたストッパのキャップ間への挿入によって上流側のキャップが停止されている間に、下流側のキャップが搬送軌道の下流側に設けられたスターホイールの溝に係合して、その回転搬送によりキャップを一つ一つ割出すキャップ割出し機構において、ストッパを挿入しようとする対象のキャップ間境界位置をスターホイール回転駆動用サーボモータの回転軸に連結されたエンコーダからの信号をもとに演算によって検出し、演算によるキャップ間境界位置検出時点でストッパを挿入するように制御装置を設けたものである。
(もっと読む)
缶の排出装置
【課題】縦置きで搬送される缶の中から、特定の缶を正確に排出し、使用する加圧流体の消費量を少なくすることが可能な缶の排出装置を提供する。
【解決手段】筒状をなす缶胴部W1と缶軸方向内方に向かう凹部W22を有する缶底部W2とを備える缶Wを縦置きで搬送する搬送手段に用いる缶の排出装置において、搬送方向に交差する方向に加圧流体を噴出する排出ノズル12を備え、前記排出ノズル12は、缶底部W2に向けて前記加圧流体を噴出する。
(もっと読む)
ドラム缶のハンドリング装置
【課題】倉庫などに収納するドラム缶の数を多くすることができ、衝撃なくドラム缶を壁面に近接して設置できると共に、壁面に近接して設置されたドラム缶を容易に取り出すことができるようにする。
【解決手段】ドラム缶10を挟持及び解放する一対のクランプ部2と、各クランプ部2を互いに近接及び離反するスライド部とを備え、クランプ部2は、ドラム缶10の長手方向の両端面部10cを挟持し、ドラム缶の両端面部10cに当接する自由回転可能な複数のフリーベアリング3を備え、クランプ部2の周囲が、ドラム缶の両端面部10cから突出した鍔部10aに係止して、ドラム缶10を持ち上げ可能とする。
(もっと読む)
トレイ自動搬送システム及び移載装置
【課題】工業用酵素を生産するためのトレイをカセットに自動で積み込み/積み下ろしができかつ工業用酵素を生産する上での衛生面及び培養中の環境管理面に優れるトレイ自動搬送システム及び移載装置を提供することを課題とする。
【解決手段】工業用酵素を生産するためのトレイを自動で搬送するトレイ自動搬送システムであって、複数のトレイTを積載するカセットCは、上下方向に延びる四本の支柱と、対向する支柱間に上下方向に複数設けられた横材を有し、複数のトレイTをカセットCに積み込む移載装置2は、積み込み時にトレイTがカセットCの対向する位置に設けられた二本の横材に載置される前にトレイTが二本の横材間を移動するときにトレイTを支持部26aで支持する支持機構26を有することを特徴とし、複数のトレイTをカセットCから積み下ろす移載装置も同様の支持機構を有する。
(もっと読む)
リーク検査装置
【課題】キャリア内に収容されて搬送される間に液体の充填およびキャッピングが行われた容器が、傷付きやピンホール等の欠陥があった場合に、キャリアごとリジェクトし、その位置に空のキャリアを補充する。
【解決手段】搬送コンベヤに等間隔で設けられたキャリア保持手段8に、キャリア2を保持させて搬送する。容器供給ポジションAでこれらキャリア2に空の容器6を供給し、液体の充填およびキャッピングを行った後、検査ポジションDで、キャリア2とヘッダー40とによって密閉空間42を形成して、この空間42内を真空ポンプ46で吸引し、圧力センサ48によって圧力を測定する。設定した圧力よりも高い圧力が検出されたときには、判定手段50が不良容器と判定して、リジェクトポジションEでキャリア2ごとリジェクトする。その後、補充ポジションFで空のキャリア2を補充する。
(もっと読む)
缶の搬送装置
【課題】マンドレルに缶を精度よく嵌合させることができ、たとえ缶がマンドレルに嵌合されなかった場合であっても、該缶に続く他の缶が連鎖的に不良缶となることを防止でき、かつ、スラッパーの部品寿命を延長できる缶の搬送装置を提供する。
【解決手段】搬送方向Cに沿うように延びるとともに該搬送方向Cに向かうに従い漸次一方側に向かって傾斜し、搬送方向Cの基端部が片持ち支持され、先端部が自由端とされたスラッパー5を備え、タレットが搬送方向Cに回転することにより、ポケットに支持された缶100が、その底部100aをスラッパー5に摺接させつつ前記一方側に向けて押し込まれ、該缶100の口部100bがマンドレル20に嵌合される缶の搬送装置であって、スラッパー5は、第1弾性体8と、第1弾性体8に沿って延びるとともに、第1弾性体8よりも搬送方向Cに長い第2弾性体9と、を備えたことを特徴とする。
(もっと読む)
容器処理装置
【解決手段】 容器処理装置1は、各バケット12内に角型の容器2を収容して搬送する第1搬送コンベヤ3と、第1搬送コンベヤ3によって搬送される容器2を撮影するカメラ4と、制御手段7によって作動を制御されて、バケット12内の容器2を吸着して取り出すロボットハンド6Aとを備えている。
カメラ4が撮影した容器2の画像が制御手段7へ伝達されると、制御手段7は、容器2の画像上の中心位置を求め、そこからバケット12の中心12cへ所定量ずらした位置を上記ロボットハンド6Aによる容器2の吸着位置として決定する。ロボットハンド6Aは、バケット12内で傾斜している容器2の側面2Bの上記吸着位置を吸着してバケット12内から取り出す。
【効果】 角型の容器2であってもロボットハンド6Aによって確実に吸着して取り出すことができる。
(もっと読む)
食品類の搬送方法及びその搬送装置
【課題】食品の製造工程において最終醗酵工程と焼成工程とを食品生地類を載置した展板に振動を与えずに、旋回し移載する食品類の搬送方法及びその搬送装置を提供する。
【解決手段】コンベヤ装置1は、パン製造工程の最終醗酵工程と焼成工程とを結ぶ搬送経路を、複数台の直線状の搬送コンベヤK1とカーブ状の搬送コンベヤとで構成し、接続部に、展板2の底面を接触または非接触で吸着保持し、展板2に上下の振動を与ずに先の搬送コンベヤから後の搬送コンベヤに移載する移載搬送手段8を設ける。搬送コンベヤに並列なコンベヤベルト4a,4bの間には、展板2の底面を接触または非接触で搬送コンベヤの上面と水平に保持する複数個の吸着保持手段15を表面に設けた昇降かつ旋回可能な円形状のターンテーブル16を設置し、このターンテーブル16の裏面側中心部に設けた支持軸をスライド搬送手段18上に立設する。
(もっと読む)
容器保持搬送装置および容器保持搬送方法
【課題】容器の保持搬送を安定して行う。
【解決手段】円周経路Rに沿って旋回移動して容器を保持搬送する容器保持部20に、左右一対の開閉軸31R,31Lに開閉自在に支持された左右のクランプアーム21R,21Lを設け、クランプアーム21R,21Lの遊端側に、容器Bの胴部を把持可能な2つの把持面25o,25iを有する把持爪25を揺動軸23を中心に開閉自在に設け、把持爪25を開動方向に付勢する開放コイルばね24と、把持爪25の閉止限となる閉止ストッパ26とを設け、左右の揺動軸23の軸心を結ぶ直線が円周経路Rより外側に位置するように揺動軸23を配置し、左右の把持爪25間から容器保持位置P側に押し込まれる容器Bが、揺動軸23の軸心を結ぶ直線を越え、クランプアーム21R,21Lの閉動力により把持爪25を閉動させて容器Bを4つの把持面25o,25iで容器Bの胴部を抱き込むように保持し容器保持位置P迄移動する。
(もっと読む)
1 - 20 / 209
[ Back to top ]