
Fターム[3F072GA05]の内容
Fターム[3F072GA05]の下位に属するFターム
計数、計量(大きさ、長さ、重さ) (34)
接触式検出(リミットスイッチ等) (6)
非接触式検出(フォトセンサー等) (110)
Fターム[3F072GA05]に分類される特許
1 - 20 / 52
物品処理装置
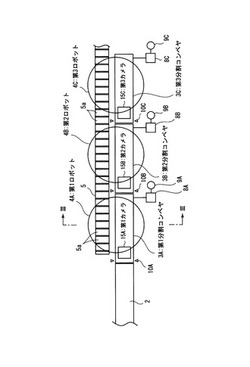
【解決手段】 直列に配置された分割コンベヤ3A〜3C毎にそれぞれロボット4A〜4Cが設けられている。各ロボットは各分割コンベヤに供給された物品を、例えば10本を一まとめとしてバケットコンベヤ5の1つのバケット5a内に受け渡すことができるようになっている。各分割コンベヤは、搬送コンベヤ2から多くの物品が供給されている状態ではそれぞれ連続して運転されているが、各分割コンベヤへの物品の供給がなくなると停止されるようになっている。各分割コンベヤは、物品が新たに供給される都度間欠的に運転され、それによって各分割コンベヤ上に所定数の物品を貯溜させるようになる。各割コンベヤ上に所定数の物品が貯溜されたら、該物品は一まとめとしてバケット内に受け渡される。
【効果】 各割コンベヤ上に所定数の物品を貯溜することができるので、各ロボットによる所定本数ずつの処理を効率的に行える。
(もっと読む)
部品搬送装置

【課題】トレイに載置された電子部品の載置状態の検出を、迅速かつ適切に行うことのできる部品搬送装置を提供する。
【解決手段】トレイ検査装置は、トレイ18に載置されたICチップの載置状態を検査する。トレイ検査装置は、トレイ18を待機させる待機位置P1及びトレイ18との間でICチップの給排を行う作業位置P2の間でトレイ18を往復移動させるトレイ搬送装置C1〜C6と、トレイ搬送装置C1〜C6によるトレイ18の搬送路に設けられるとともに、トレイ18の幅に対応する検出範囲を有してICチップの載置状態を非接触にて検出するラインセンサー46と、ラインセンサー46による検出情報に基づいてICチップの載置状態の適否を判定するトレイ状態判定部とを備える。
(もっと読む)
ピッキングシステム
【課題】作業効率の向上を図ること。
【解決手段】カメラ3が、コンベアの搬送路上を撮像し、制御装置5が、カメラ3によって撮像された画像に基づいて搬送路上のワークを検出するとともに、検出したワークの保持動作をロボット2a,2bに対して指示し、ロボット2a,2bが、制御装置5からの指示に従って保持動作および移動動作を行う。特に、制御装置5は、カメラ3によって撮像された画像に基づいてワークの向きを検出し、検出したワークの向きに対応するロボット2a,2bに対してかかるワークの保持動作を指示する。
(もっと読む)
ピッキングシステム
【課題】複数のワークを向きを揃えて載置する場合に、複数のワークの保持を短時間で行うこと。
【解決手段】ロボット2a,2bは、ワークwを保持する複数の保持部23a,24a,23b,24bと、アーム先端部21a,21bに対して回転可能に設けられ、複数の保持部23a,24a,23b,24bを支持する支持部22a,22bとを備える。また、制御装置は、保持部23a,24a,23b,24bを用いて保持したワークwごとに、かかるワークwの向きが所定の向きとなるように支持部22a,22bを所定量回転させたうえでかかるワークwを所定の場所へ載置する載置動作の実行をロボット2a,2bに対して指示する。
(もっと読む)
ピッキングシステム
【課題】作業効率の向上を図ること。
【解決手段】カメラ3が、コンベアの搬送路上を撮像し、制御装置5が、カメラ3によって撮像された画像に基づいて搬送路上のワークを検出するとともに、検出したワークの保持動作をロボット2a,2bに対して指示し、ロボット2a,2bが、制御装置5からの指示に従って保持動作および移動動作を行う。特に、制御装置5は、カメラ3によって撮像された画像の画像領域を分割した分割領域ごとに、分割領域に属するワークに対する保持動作の実行をかかる分割領域に対応するロボット2a,2bに対して指示する。
(もっと読む)
ピッキングシステム
【課題】ワークの取りこぼしを防止すること。
【解決手段】ロボット2が、コンベアによって搬送されるワークを保持する保持動作および保持したワークを所定の場所へ移動させる移動動作を行い、メインカメラ3aが、搬送路上の領域を撮像し、制御装置5が、メインカメラ3aによって撮像された画像に基づいて搬送路上のワークを検出するとともに、検出したワークの保持動作をロボット2に対して指示する。また、制御装置5の重なり検出部514が、ワークの重なりを検出し、制御装置5の動作指示部515が、重なり検出部514によってワークの重なりが検出された場合に、重なったワークの保持動作をロボット2に対して指示する。
(もっと読む)
物品の装備用機械
【課題】高い柔軟性と良好な近接性とを有する、物品の装備用の簡単かつコスト的に有利な機械を提供する。
【解決手段】少なくとも1つの回転体1と、回転体の周縁に配置された、物品40の装備用の少なくとも1つの独立したラベル貼付装置30と、物品40の位置正確な供給および搬出用の同期駆動可能な搬送要素3、4、5、6とを備える、容器などの物品40の装備用機械である。回転体1の周縁には、回転体1用の少なくともラベル貼付装置30の相対位置を決定するための要素21、22、23が存在する。
(もっと読む)
選果システム
【課題】選果システムにおける移送装置による載置台からトレイへの青果物の移送能率を向上させることができる技術を提供することを課題とする。
【解決手段】載置台搬送装置51によって搬送される載置台5に載置される青果物6を、トレイ搬送装置53によって搬送されるトレイ8へ移送する移送装置60を備え、載置台5に載置される青果物6を等級や階級毎に前記トレイ8に詰める、選果システム1であって、移送装置60は、青果物6を吸着する吸着部66を複数個備え、複数個の吸着部66・66・・・にて複数個の青果物6・6・・・を一度に吸着可能に構成される。
(もっと読む)
ワーク移載システム
【課題】ワーク供給量のバラツキに関係なく、オーバーフローしないワーク移載システム。
【解決手段】ワーク4を搬送するピックアップコンベア2と、前記ワーク4を載置するためのトレイ5を搬送するプレイスコンベア3と、前記ワーク4を保持および解放して前記トレイ5へ移載する複数台のロボット7と、前記ワーク4および前記トレイ5の位置、形状および数量をそれぞれ検知するセンサと、前記センサからの情報に応じて前記ピックアップコンベア2および前記プレイスコンベア3の搬送速度と前記ロボット7の動作とを制御するコントローラ8とを有するワーク移載システム10において、複数台の前記ロボット7が、前記ワーク4の搬送方向に沿うように配設され、前記センサが、前記ワーク4の搬送方向における前記ロボット7の上流側と、前記トレイ5の搬送方向における前記ロボット7の上流側とに配設されるワーク移載システム。
(もっと読む)
PTPシート搬送装置
【課題】PTPシートの搬送時間を短縮できると共に、十分な受渡し時間を確保することのできるPTPシート搬送装置を提供する。
【解決手段】PTPシート搬送装置11は反転装置12を備え、反転装置12にはハウジング16の周囲に90度間隔で固定クランプ装置21Aと可動クランプ装置21Bとが1つおきに交互に設けられている。反転装置12は、可動クランプ装置21Bの回動軸18の傘歯車26と、ハウジング16の駆動軸14と同心で回転可能に設けられ、傘歯車26に噛合される傘歯車27と、傘歯車27の回転及び停止を駆動制御する駆動制御機構とを備えている。そして、受取り区間や第1受渡し区間等に可動クランプ装置21Bが在る場合においては、傘歯車27をハウジング16と同期して回転させることにより、可動クランプ装置21Bが回転軸18の軸線回りに回転しない構成となる。
(もっと読む)
ロール状物品用の保管設備
【課題】搬出部から搬出されるロール状物品の巻き方向が、必要な巻き方向と異なる場合において、必要な巻き方向に簡単に調整することが可能なロール状物品用の保管設備を提供する。
【解決手段】シート状体が巻き取られたロール状物品Rを横倒れ姿勢で収納する収納部S1を備える物品保管部H1と、ロール状物品Rが横倒れ姿勢で搬入される搬入部N1と、物品保管部H1に収納したロール状物品Rを横倒れ姿勢で搬出する搬出部T1と、搬入部N1に搬入されたロール状物品Rを収納部S1に収納しかつ収納部S1に収納されたロール状物品Rを搬出部T1に取り出す物品搬送手段とが設けられ、搬出部T1に、ロール状物品を左右反転する出庫用左右反転手段が設けられている。
(もっと読む)
物品搬送装置
【課題】物品を後続の物品と分離して搬送経路下流側への送出しピッチが調整可能であり、後続の物品によるラインプレッシャーやモータの回転により物品が強制的に下流側へ送られることもなく、搬送経路において物品が押し潰されてしまうことも回避できる物品搬送装置の提供。
【解決手段】一対のカムフォロア2が離間して配設された駆動ベース3と、前記駆動ベース3を前記一対のカムフォロア2の離間方向に往復動させるエアシリンダ4と、前記駆動ベース3の往復動により前記一対のカムフォロア2が径方向の両端において交互に当接することにより間歇的に一定角度回転可能に配設されたラチェット状の駆動ホイル8と、前記駆動ホイル8の回転力により回転可能に軸支され、ピッチ調整位置において、外周に等間隔に形成されたポケット14が物品の搬送経路上に供給される送り出し対象の物品を収容保持するようにして配設されたコントロールホイル13とを備える。
(もっと読む)
包装機における物品供給装置
【課題】ロボットを用いて物品を高速で搬送する包装機における物品供給装置を提供する。
【解決手段】定速回転する回転体12に所定の角度間隔で支持されるアーム20を有していて、回転体12が回転中において前記アーム20を回動させて、物品を吸着した吸着具25を、前記支持位置より前記回転体12の中心に近づけてから、該吸着具25を第2コンベヤ2の搬送方向に向けて移動させて物品を載置した後、該物品を載置したときの前記回転体の中心と支持位置16とを結ぶ線分に対するアームの角度より大きく広がるようにアーム20を回動させて、前記物品保持領域物品の物品を吸着する。
(もっと読む)
容器搬送装置
【課題】袋本体と首部とを有する複数の容器を整列された状態で箱詰めすることが可能な容器搬送装置を提供すること。
【解決手段】袋本体と首部とを有する容器Cを搬送する容器搬送装置Aであり、容器Cを供給する製袋機1、複数の容器Cを受け渡し位置P1まで順次搬送する入り側コンベア2、容器Cを受け渡し位置P1x方向に沿って受け渡し位置P2まで搬送する中間コンベア4、受け渡し位置P1に設置され、入り側コンベア2によって搬送されてきた容器Cを、首部がy方向の一方側および他方側のいずれかを向く姿勢に整列された所定数の容器Cごとに区分して中間搬送コンベア4へ受け渡す整列手段3、受け渡し位置P2に箱Bを順次搬送し、容器Cが詰められた箱Bを排出する出側コンベア6、第2の受け渡し位置P2に設置され、中間コンベア4により搬送されてきた所定数の容器Cを、出側コンベア6により搬送されてきた箱Bに詰める箱詰め手段5、を備える。
(もっと読む)
ロケーティングステーション
【課題】コンベアシステム用のロケーティングデバイスを提供する。
【解決手段】コンベアシステムにおけるロケーティング位置でパックを保持するためのロケーティングデバイス(1)は、ベース部(4)と、レールセクション(2)と、ベース部(4)に回転可能に支持されかつパック凹部(5)を有する回転ディスク(3)とを具備してなり、ロケーティングデバイスは、回転ディスク(3)のパック凹部(5)とレールセクションにおけるポジショニング手段(6)と間のロケーティング位置を具備してなると共に、ロケーティングデバイスはロケーティング位置においてパックを保持するよう構成された弾性手段(7)を具備してなる。本発明の利点は、物品を、あるコンベアトラックから他のコンベアトラックへと、容易にかつコスト効率よく移動させることができるということである。
(もっと読む)
移載装置及び移載方法並びに物品仕分け設備
【課題】従来よりも移載処理能力が向上した移載装置及び移載方法並びに物品仕分け設備を提供する。
【解決手段】
複数の物品が品種ごとに分けられてそれぞれ収容された複数の実ケースから、物品を移載して収容する仕分けケースを搬送するロボットプレースコンベヤ41と、物品を実ケースから仕分けケースに移載するロボット40と、を備えた移載装置69であって、実ケースを搬送する実ケース搬送コンベヤ25から供給された複数の実ケースを往復動させる往復動コンベヤ70を備え、往復動コンベヤ70を動作させて、移載対象となる物品をロボット40の動作範囲内に移動させる。
(もっと読む)
複数ワークの支持方法
【課題】ワーク移送用ハンガーへのワークの掛け作業及び処理完了後のワークの降し作業を、作業の省力化と効率向上、更にはワークの表面処理面の品質向上を目的として自動化するためのワークの自動掛け方法やその方法を使用した自動掛け装置に適用して有用な複数ワークの支持方法を提供すること。
【解決手段】セパレータによりガイドレール上に分離整列された複数ワークを、セパレータに保持させたまま、前記ガイドレール上方でサポート部に片持ち支持された串状支持体に向け移動させ、各ワークに設けられた掛止孔又は切欠に前記串状支持体を貫通させることにより、前記複数ワークを分離整列状態のままで前記レール上で前記串状支持体にまとめて支持させること。
(もっと読む)
箱詰め装置
【課題】簡単かつ安価に製造することができるとともに、収納箱内における物品の整列状態を安定させることができる箱詰め装置を提供する。
【解決手段】箱詰め装置は、一対の第1羽根車60と、一対の第1羽根車60を互いに逆方向に回転させる第1回転手段とを有する第1羽根車装置42を備え、一対の第1羽根車60のそれぞれの第1羽根66は、複数の物品14のうちの1つを支持する第1支持部74と、他の1つを第1支持部74よりも供給方向の前方において支持する第2支持部84とを有しており、第1支持部74および第2支持部84は、回転軸L1に対して交差する方向において段差88を有するように2段に構成されており、第1羽根66が複数の物品14を支持する回転位置にあるとき、第1支持部74が第2支持部84よりも下方に位置する。
(もっと読む)
異物排除装置
【課題】製造ラインで原材料を検査して異物を排除する際に、異物と共に排除される原材料の量を少なくして無駄を省く。
【解決手段】異物排除装置1は、ベルトコンベア2と、搬送される原材料Mに含まれた異物Fを検出するエックス線源4及びセンサ5を有し、位置情報検出手段6により原材料における異物の2次元の位置情報を取得する。さらにくり抜き手段9が該位置情報を受けて異物の2次元の位置に位置決めされ、下降して原材料に切り込むことにより、異物Fと異物Fの周囲にある原材料Mの一部のみを切断して除去する。
(もっと読む)
電子部品特性検査分類装置
【課題】回転する円盤に電子部品を対で順次供給し、保持させ、搬送させて検査し、検査の結果に基づき電子部品を分類する電子部品特性検査分類装置を提供する。
【解決手段】本発明の装置は、ポケット群を有し電子部品1をポケット単位またはポケット対単位で保持搬送可能な円盤7と、円盤7をポケット対単位で回転駆動する円盤駆動機構3と、ポケット対単位で前記ポケット群に電子部品1を供給する電子部品供給手段8と、検査項目数に対応して円盤7の回動域に配置されており、対の電子部品1に対応する電極ユニット4を備える検査ユニット群からなり、各電子部品の検査データを取得する検査手段と、取得した検査データに基づいて電子部品1を分類した結果に基づいて電子部品1を分類する分類装置と、円盤7に電子部品を2個同時に供給し、検査可能に駆動し、検査手段により検査データを取得させ、検査の結果に基づく分類に従って分類装置に分類させる制御装置11を含む。
(もっと読む)
1 - 20 / 52
[ Back to top ]