
Fターム[3F072GC04]の内容
特殊移送 (6,503) | 配列変更 (209) | 間隔変更、ピッチ変更 (126) | 前後方向 (87)
Fターム[3F072GC04]に分類される特許
1 - 20 / 87
物品搬送装置
【課題】簡略化した構造のロボットハンドを使用しても、容器に物品を刺身重ね状に綺麗に載置することが可能な物品搬送装置を提供する。
【解決手段】容器搬送コンベヤ4は、幅方向Yで水平面に対し傾斜した載置面16aに容器3を載置して搬送する第一搬送部15と、第一搬送部15で物品1が載置された容器3を受渡部18に搬送する際に容器3を傾斜状態から略水平状態に変換する第一姿勢変換部17と、受渡部18,22で容器3を略水平状態から第一搬送部15とは逆向きに傾斜させる第二姿勢変換部23と、容器3を略水平状態に戻して搬送する搬送ベルト21とを備えている。ロボットは、載置面16aに傾斜姿勢で載置された容器3に複数の物品1を載置する際に、第一搬送部15で水平面に対し物品1のなす角度を、搬送ベルト21にて略水平姿勢にある容器3内で各物品1が水平面に対しなす角度より小さくして、各物品1を刺身重ね状に容器3に載置する。
(もっと読む)
錠剤カセット用ロータ

【課題】払い出す錠剤の大きさに応じて、ロータの案内溝の幅、深さ、錠剤の分離位置を簡単に調整する。
【解決手段】ロータ3の半径方向に移動可能な複数の可動片13により複数の錠剤案内溝88のそれぞれのロータの半径方向の面を形成する。可動片13を移動させる可動片移動機構15を設け、この可動編移動機構により、錠剤の大きさに応じて、複数の可動片を半径方向に移動させて複数の錠剤案内溝の深さを調整可能とする。また、錠剤案内溝の両側の側面をロータ3の周方向に相対的に移動させる溝幅調整機構17,18,19を設ける。さらに、ロータの錠剤案内溝の開口端から当該錠剤案内溝に進入して当該錠剤案内溝内の錠剤を押圧するように弾性変形可能な錠剤押さえ部材20と、錠剤案内溝がカセット本体に設けた錠剤出口に対応する位置にきたときに、錠剤押さえ部材を錠剤案内溝に向かって押し付ける押し付け部材4とを設ける。
(もっと読む)
容器搬送装置
【課題】回転部分のブッシュの摩耗を抑え、メンテナンスの手間とコストを抑える。
【解決手段】グリッパ20を開閉するためにカム15や開度増大装置17のカム部201、スプリング80から押圧力や引張力が作用すると、その押圧力や引張力によるモーメントは、シャフト部材90を介してスライドブッシュ60に主に作用し、シャフト部材91にはほとんど作用しない。また、スライドブッシュ60もグリッパ20の中心線上に配置されているため、偏荷重が作用しにくい。さらに、スライドブッシュ60は、容器100を保持するグリッパ20の外周側端部20aから最も離れた、内周側端部20bに位置している。
(もっと読む)
キャップ割出し機構
【課題】本発明は、搬送軌道上を搬送されてくるキャップ間境界位置からずれない位置にストッパが挿入されるようにして、キャップに傷付き等の損傷を与えることがないキャップ割出し機構を提供する。
【解決手段】本発明に係るキャップ割出し機構は、搬送軌道上を搬送されてくるキャップが搬送軌道の下流側に設けられたストッパのキャップ間への挿入によって上流側のキャップが停止されている間に、下流側のキャップが搬送軌道の下流側に設けられたスターホイールの溝に係合して、その回転搬送によりキャップを一つ一つ割出すキャップ割出し機構において、ストッパを挿入しようとする対象のキャップ間境界位置をスターホイール回転駆動用サーボモータの回転軸に連結されたエンコーダからの信号をもとに演算によって検出し、演算によるキャップ間境界位置検出時点でストッパを挿入するように制御装置を設けたものである。
(もっと読む)
集積移送装置
【解決手段】 集積移載装置としての第1集積移載手段4Aは、物品2を収容した収容手段24を上下方向に循環搬送するアキュームコンベヤ12と、物品を1列に収容するポケットを複数段備えた回転バケット13を循環搬送する回転集積手段14とを備えている。
上記アキュームコンベヤが複数の収容手段が上下に整列するように受け渡し位置に移動させると、上記回転集積手段は上記上下複数段のポケット13aが上下に整列した各収容手段の高さに一致するように回転バケットを位置させ、各収容手段の物品が上下複数段のポケットに受け渡される。
そして上下複数段のポケットに受け渡された物品は、排出手段としての第1中間コンベヤ5Aに複数段に積層された状態で排出されるようになっている。
【効果】 物品を所定個数毎に集積するとともに、この物品を複数段に積層した状態で排出手段に排出することができる。
(もっと読む)
物品搬送装置
【課題】コンベヤにおける各仕切り部材の間に搬入された物品が跳ね返って収容区画外に飛び出してしまうことがなく、物品を各仕切り部材の間に確実に収容して搬送し得る物品搬送装置を提供する。
【解決手段】搬送コンベヤ1の歯付ベルト10に設けた仕切り部材11は、先端部において搬送方向前方に向けて張り出す第1案内部11bを備えており、収容区画へ搬入された物品Wの前端が、各仕切り部材11間の収容区画の底部16に到るまでに、仕切り部材11を前進移動して第1案内部11bで物品Wの重心Wpより後方を歯付ベルト10の走行方向前方へ押して物品Wの前方を仕切り部材11の移動方向後方に向けて傾動させる。
(もっと読む)
容器用キャップの移送装置および検査装置
【課題】キャップを掻き込み用スターホイールに送り込む際に速度制御を自由に行うことができ、キャップの推進力を適切に調整することができる容器用キャップの移送装置を提供することを目的とする。
【解決手段】真空源に接続された円弧状溝34hを有した固定側部材34と、固定側部材34の上方に配置され、複数の貫通孔33hを有するとともに固定側部材34に摺接しながら回転するターンテーブル板33とを備え、ターンテーブル板33の回転により、ターンテーブル板33の貫通孔33hが固定側部材34の円弧状溝34hに断続的に連通し、貫通孔33hが円弧状溝34hに連通している間にターンテーブル板33上の容器用キャップ1を吸着して円弧状軌道に沿って移送し、貫通孔33hと円弧状溝34hの連通を断つことにより容器用キャップ1をスターホイール4の凹部に受け渡すようにした。
(もっと読む)
計数機
【課題】高速運転を確保しつつ、回転コンベアの収容空間へ確実に製品を収容することが可能な計数機を提供する。
【解決手段】本実施形態に係る計数機1は、所定の周回経路上で周回する周回部材20と、周回部材20に所定の間隔で設置された多数の仕切部材21とを有し、製品供給部25に落下してくる製品を仕切部材21間の収容空間に一枚ずつ収容させて搬送する回転コンベア装置10と、製品排出部29において所定の枚数単位で製品を押し出して排出する押出部材60と、周回経路と製品供給部25において上側で重なると共に製品排出部29において離れる所定の補助周回経路上で周回する補助周回部材40と、補助周回部材40に仕切部材21と同じ間隔で設置された多数の補助仕切部材41とを有し、補助仕切部材41が製品供給部25において仕切部材21の上側を同期して通過する補助装置30と、を備える。
(もっと読む)
物品搬送装置
【課題】物品を後続の物品と分離して搬送経路下流側への送出しピッチが調整可能であり、後続の物品によるラインプレッシャーやモータの回転により物品が強制的に下流側へ送られることもなく、搬送経路において物品が押し潰されてしまうことも回避できる物品搬送装置の提供。
【解決手段】一対のカムフォロア2が離間して配設された駆動ベース3と、前記駆動ベース3を前記一対のカムフォロア2の離間方向に往復動させるエアシリンダ4と、前記駆動ベース3の往復動により前記一対のカムフォロア2が径方向の両端において交互に当接することにより間歇的に一定角度回転可能に配設されたラチェット状の駆動ホイル8と、前記駆動ホイル8の回転力により回転可能に軸支され、ピッチ調整位置において、外周に等間隔に形成されたポケット14が物品の搬送経路上に供給される送り出し対象の物品を収容保持するようにして配設されたコントロールホイル13とを備える。
(もっと読む)
包装機における物品供給装置
【課題】ロボットを用いて物品を高速で搬送する包装機における物品供給装置を提供する。
【解決手段】定速回転する回転体12に所定の角度間隔で支持されるアーム20を有していて、回転体12が回転中において前記アーム20を回動させて、物品を吸着した吸着具25を、前記支持位置より前記回転体12の中心に近づけてから、該吸着具25を第2コンベヤ2の搬送方向に向けて移動させて物品を載置した後、該物品を載置したときの前記回転体の中心と支持位置16とを結ぶ線分に対するアームの角度より大きく広がるようにアーム20を回動させて、前記物品保持領域物品の物品を吸着する。
(もっと読む)
容器搬送装置
【課題】袋本体と首部とを有する複数の容器を整列された状態で箱詰めすることが可能な容器搬送装置を提供すること。
【解決手段】袋本体と首部とを有する容器Cを搬送する容器搬送装置Aであり、容器Cを供給する製袋機1、複数の容器Cを受け渡し位置P1まで順次搬送する入り側コンベア2、容器Cを受け渡し位置P1x方向に沿って受け渡し位置P2まで搬送する中間コンベア4、受け渡し位置P1に設置され、入り側コンベア2によって搬送されてきた容器Cを、首部がy方向の一方側および他方側のいずれかを向く姿勢に整列された所定数の容器Cごとに区分して中間搬送コンベア4へ受け渡す整列手段3、受け渡し位置P2に箱Bを順次搬送し、容器Cが詰められた箱Bを排出する出側コンベア6、第2の受け渡し位置P2に設置され、中間コンベア4により搬送されてきた所定数の容器Cを、出側コンベア6により搬送されてきた箱Bに詰める箱詰め手段5、を備える。
(もっと読む)
被搬送物の転写装置
【課題】被搬送物の表面に凹凸があっても、該被搬送物を安定して保持ヘッドに転写することができ、更に該被搬送物を他の部材に転写することができる装置を提供すること。
【解決手段】凹凸表面を有する被搬送物3を、保持ヘッド15の保持表面15aに転写して吸引保持し、更に他の部材17a等に転写する被搬送物の転写装置10である。保持ヘッド15の保持表面15aが、被搬送物3の凹凸表面と相補形状をなす凹凸形状となっている。被搬送物3の凹凸表面が段差を有しており、保持表面15aのうち、該段差が変化する部位に対応する部位の近傍に、吸引孔が設けられていることが好適である。
(もっと読む)
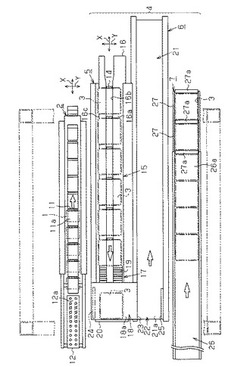
マルチセグメントフィルタの製造プロセスにおけるフィルタセグメントの安全移送方法
マルチセグメントフィルタの製造にあたり、適正に調製されたセグメント(1)を、送り出しゾーン(2)を通って分離ユニット(5)を備えた分離ゾーン(4)に移送し、次に、軸線(10)に取り付けられていて移送ユニット(11)を構成する回転円板(9)のドライバ(8)相互で移送し、中断ユニット(T)で移送ユニット(11.)により中断し、中断ユニット(T)においてセグメントを個々に、移送ゾーン(12)を通って配置ゾーン(4)に移送し、配置ゾーン(4)においてセグメントをグループ分けベルト(13)の水平軌道上に位置決めし、いずれかのゾーン(2,4,7,12,14)内における且つ/或いはゾーン相互間におけるフィルタセグメント(1)の不正確な流れの場合、少なくとも1つのゾーン内におけるフィルタセグメントの移送を中断し、それによりフィルタ製造プロセスを停止する。不正確な流れの検出は、各ゾーン内におけるモータの駆動トルクをチェックすることにより各種機構体の動作に対する抵抗をチェックすることによって、或いは移送ユニット(11)及び/又は分離ユニット(5)内に固定された位置センサ(17)により各種機構体の位置の変化をチェックすることによって行なわれる。プロセスの中断は、フィルタセグメント(1)の流れ軌道からの移送ユニット(11)及び/又は分離ユニットの取り出しによって行われ、取り出しは、空気圧シリンダが移送ユニット(11)を移送ユニット(11)の回転軸線(10)に平行な軸線を備えたその案内(16)に沿って動かすことにより、或いは空気圧シリンダが移送ユニットを案内の軸線回りに回転させることにより行なわれる。案内に一緒に取り付けられた移送ユニット及び分離ユニットは、移送ユニットの回転軸線に垂直な軸線の案内に沿って動くことにより或いは移送ユニットの回転軸線に平行な案内の軸線回りに回転することにより取り出し可能である。 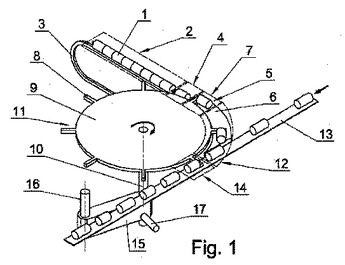 (もっと読む)
(もっと読む)
物品移載装置
【課題】キャリアに収容された容器を整列状態で搬送する第1コンベヤから、複数の保持手段を備えた移載手段によって容器を保持して第2コンベヤに移載する物品移載装置において、第1コンベヤの容器に欠落があった場合に、ストック部にストックした容器を補給する。
【解決手段】検知手段18によって第1コンベヤ6上の容器4に欠落があったことを検出すると、複数の保持手段のうち、この欠落した位置の容器4を保持する保持手段を特定する。移載手段20を前記ストック部12に移動させ、特定された保持手段に容器4を保持させた後、その他の保持手段には、第1コンベヤ6上の容器取り出し位置Tに停止している容器4を保持させ、全ての保持手段に保持されている容器4を第2コンベヤ10のケース8内に挿入する。
(もっと読む)
部品の外観検査装置
【課題】装置の大幅な小型化を図りながら、被検査部品の種類や大きさ等を問わず安定して搬送させ、多角度的な撮像ができる部品の外観検査装置を提供する。
【解決手段】被検査部品20を投入する所定形状の窪み部K1が形成された内側の回転テーブルD1と、内側の回転テーブルD1の外周に配された外側の回転テーブルと、外側の回転テーブルの外周に一体的に設けられた透明な鍔部と、被検査部品20を透明な鍔部に受け渡すための受け渡し手段F1と、被検査部品20を撮像する複数の撮像カメラC1、C2・・・とを備え、前記被検査部品20を透明な鍔部に受け渡すため回転テーブルD1の上面T1aと透明な鍔部の上面T2aに複数のガイド部材Gが略螺旋状に配される。
(もっと読む)
ワーク移載装置
【課題】動作の無駄を省いて処理能力を向上できるとともに故障の発生を少なくでき、しかも構造が簡単で安価に製作できるとともに小型に構成可能なワーク移載装置を提供する。
【解決手段】ワークとしてのカップ飲料1を保持するためのワーク保持手段41を有する1組のワーク保持ユニット42であって、回転軸43を挟んでその両側に設けた1組のワーク保持ユニット42と、回転軸43を中心とした回転運動と回転軸43の軸方向への直線運動とによって、一方のワーク保持ユニット42をカップ容器の受取位置から受渡位置へ移送するとともに、他方のワーク保持ユニット42をカップ飲料の受渡位置から受取位置へ移送して、両ワーク保持ユニット42を受取位置と受渡位置とに交互に位置切換えする位置切換手段44とを備えた。
(もっと読む)
容器群積付け装置及び積付け方法
【課題】簡易な装置構成で多様な形状、素材、剛性及び重量の容器を損傷させずに、又、多様な配列の容器群の寸法差異や整列状態の乱れ、あるいは容器の欠落に影響を受けないでパレット上に容器群を安定して段積みできる積付け装置及び方法を提供する。
【解決手段】容器群積付け装置1は、幅広い種類の容器に対応可能な吸引ヘッド2、その移動手段及び負圧供給手段4を具備する保持搬送装置10を備えており、保持搬送装置10の吸引ヘッド2を移動手段で移動させて一連の段積み操作を行う。即ち多列ステージ22に整列された容器群を吸引ヘッド2で吸引保持した後、セパレートシート供給装置23で供給されたセパレートシート上に移動する。そこで、吸引ヘッド2に吸引保持された容器群の下側にセパレートシートを更に吸引保持した後、パレット20上に搬送し、両者を一体でパレット20に積む。この操作を繰り返して段積みを完了する。
(もっと読む)
分離装置
【課題】本発明は半導体検査装置において半導体素子を一つずつ分離して反り問題を解決するための分離装置を開示する。
【解決手段】この分離装置は動力源、押下台、第一スウィングアームセット、第二スウィングアームセット、第三スウィングアームセット、第一グリッパーセット、第二グリッパーセット、第一プッシュブロック、第二プッシュブロック及びストップアームからなる。動力源を駆動して押下台を下降させて各スウィングアームセットを押さえ付けることによって、第一グリッパーセット、第二グリッパーセット及びストップアームで分離作業を行う。この分離装置は動力源のみを有すると共にこの動力源で各部材を動かして分離を行うので、分離速度を加速してフィードシステムの体積を縮小することができる。
(もっと読む)
外観検査装置
【課題】複数のチップ部品を順次1つずつ連続して高速に、しかも精度良く確実に外観検査することのできる外観検査装置を提供する。
【解決手段】部品供給機構から搬送路上に供給されたチップ部品を検出する光電センサの出力に基づいて前記搬送路上における複数のチップ部品の並びの良否を判定し(判定手段)、前記搬送路上のチップ部品を撮像するカメラの上流側に設けた排除機構により、並びが不良と判定されたチップ部品を前記搬送路上からを排除して前記カメラによる検査対象から除外する。
(もっと読む)
ホッパー付きネジ類供給装置
【課題】無動力でホッパー体からネジを供給することができ、ネジ供給装置自体はコンパクトでありながら、ホッパー体自体が着脱可能であるので、作業者が一人で作業を行うセル方式のみならず、全自動工程に組込まれてもホッパー体を設置することで頻繁にネジの補充をする必要が無いコンパクト性を保持したホッパー付きネジ類供給装置を提供する。
【解決手段】ネジ供給装置において、ホッパー体の下部に垂下形成した挿入筒部3を収容部内に着脱自在に挿入する。しかも、ホッパー体2と挿入筒部3を供給装置本体による振動に対して影響を受けない所定間隙を設けて設置し、挿入筒部3の下端に設けた供給口6より収容部内にネジを無動力で収容部内へ順次供給するようにしたホッパー付きネジ類供給装置である。
(もっと読む)
1 - 20 / 87
[ Back to top ]