
Fターム[3F072GG12]の内容
特殊移送 (6,503) | その他の目的、特徴 (461) | ストッパ、物品係止部材 (71) | 位置決め、固定 (28)
Fターム[3F072GG12]に分類される特許
1 - 20 / 28
キャップ割出し機構
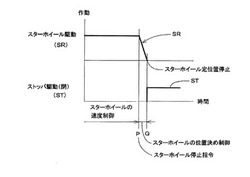
【課題】本発明は、搬送軌道上を搬送されてくるキャップ間境界位置からずれない位置にストッパが挿入されるようにして、キャップに傷付き等の損傷を与えることがないキャップ割出し機構を提供する。
【解決手段】本発明に係るキャップ割出し機構は、搬送軌道上を搬送されてくるキャップが搬送軌道の下流側に設けられたストッパのキャップ間への挿入によって上流側のキャップが停止されている間に、下流側のキャップが搬送軌道の下流側に設けられたスターホイールの溝に係合して、その回転搬送によりキャップを一つ一つ割出すキャップ割出し機構において、ストッパを挿入しようとする対象のキャップ間境界位置をスターホイール回転駆動用サーボモータの回転軸に連結されたエンコーダからの信号をもとに演算によって検出し、演算によるキャップ間境界位置検出時点でストッパを挿入するように制御装置を設けたものである。
(もっと読む)
容器グリッパ

【課題】断面外周が丸形でない容器口部を正確に位置決めして確実にグリップ保持する。
【解決手段】容器口部は、ボトルネック部Pnと、キャップ巻き締めねじ部Psと、ボトルネック部Pnとキャップ巻き締め部Psとの境界部の鍔部Prと、キャップがねじ切られて開封された際にキャップリングが残留する位置に相当する帯状部Pmを有する。容器グリッパ1は、鍔部Prの帯状部Pm側に係合して容器口部を保持するネックホルダー11と、ネックホルダー11のキャップ巻き締めねじ部Ps側に、キャップ巻き締めねじ部のねじの外周をほぼ半円周囲うように挟むことによって、容器口部のネックホルダー11に対する容器半径方向の位置決めをするようにしたネックサポート12と、が設けられている。
(もっと読む)
ワーク受渡装置及びワーク受渡方法
【課題】ワークの形状等により整列して隣接するワーク同士が係合あるいは付着していても、ワークを一つずつ分けて受け渡すことができるワーク受渡装置及びワーク受渡方法を提供すること。
【解決手段】ワーク受渡装置1は、整列装置100の整列路から送り出す先頭のワークWを載置する昇降載置面11を有する昇降架台10と、昇降載置面11に隣接して、整列路面101の高さと異ならせた高さに設けられ搬送装置200にワークを受け渡す受渡載置面21を有する受渡載置台20と、昇降架台10の昇降載置面11を整列路面101と受渡載置面21との高さ位置に昇降駆動させる昇降駆動手段40と、受渡載置面21に対向して設置した支持ブロック30と、支持ブロック又は受渡載置台のいずれか一方に吸引開口31を形成して昇降載置面11のワークを吸引して受渡載置面21に受け渡す吸引機構50と、を備える構成とした。
(もっと読む)
回転式容器搬送装置
【課題】ネック搬送している容器4の底部側が遠心力で外方へ振られることを防止する。
【解決手段】一対の把持部54を有するグリッパ48が回転体10aの外周部に円周方向等間隔で設けられており、このグリッパ48によって容器4のネック部4bに形成されているフランジ4cよりも下側を把持して搬送する。前記グリッパ48に、前記容器4のフランジ4cよりも上方に、回転体10aの中心側から当接する第1支持体(上ガイド部材)58と、フランジ4cの下面側に、回転体10aの中心側から当接する第2支持体60(下ガイド部材)とを設ける。
(もっと読む)
箱詰め装置
【課題】 物品の箱詰めを高速に行うことができる箱詰め装置を提供すること。
【解決手段】 一時保持装置40は、箱検知器66が箱詰め位置Pに箱が位置したことを検知しない限り、第3及び第4の羽根車41、42のある一対の羽根上に投下装置20から投下された物品を受け取って保持し、箱検知器66が箱詰め位置Pに箱が位置したことを検知すると、該第3及び第4の羽根車41、42のある一対の羽根上に保持した物品を投下するよう構成されている。
(もっと読む)
検査用搬送装置
【課題】生産性を落とすことなく全数検査を行なうのに適した検査用搬送装置を提供する。
【解決手段】検査用搬送装置11は、上向きの開口部3を有するキャリアカップ1と、開口部3に投入された容器7とを矢印Tの向きに搬送する過程で、搬送コンベヤ13の搬送ベルト21に載せられたキャリアカップ1を保持手段が保持し、容器7の上部を挟着手段が挟着し、昇降手段33が挟着手段29と共に容器7を上昇させた状態で、回転駆動手段の駆動ローラの回転に従わせ容器7を鉛直軸周りに180度回転させるものである。
(もっと読む)
搬送ホイール用容器回動抑制機構
【課題】複数のホイールを組み合わせての容器のネック搬送において、容器のホイール搬送途中およびホイール間の受け渡しの全区間を通して、容器の中心軸回りの回動を抑制する。
【解決手段】容器胴部(平坦部)CBに当接又は近接する平坦部22aを有する第2容器回動抑制機構22をグリッパーの下部に設ける。なお、平坦部22aはホイールの中心と各グリッパーの中心を結ぶ直線に直交する平坦面を有し容器胴部CBに当接又は近接するように構成する。
(もっと読む)
箱詰め装置
【課題】簡単かつ安価に製造することができるとともに、収納箱内における物品の整列状態を安定させることができる箱詰め装置を提供する。
【解決手段】箱詰め装置は、一対の第1羽根車60と、一対の第1羽根車60を互いに逆方向に回転させる第1回転手段とを有する第1羽根車装置42を備え、一対の第1羽根車60のそれぞれの第1羽根66は、複数の物品14のうちの1つを支持する第1支持部74と、他の1つを第1支持部74よりも供給方向の前方において支持する第2支持部84とを有しており、第1支持部74および第2支持部84は、回転軸L1に対して交差する方向において段差88を有するように2段に構成されており、第1羽根66が複数の物品14を支持する回転位置にあるとき、第1支持部74が第2支持部84よりも下方に位置する。
(もっと読む)
星形コンベヤ用のグリップ装置および星形コンベヤ
本発明は、星形コンベヤ(1)、および星形コンベヤ(1)または類似の搬送ユニット用のグリップ装置(2)に関し、グリップ装置(2)は、容器または類似のボディをグリップ位置において把持および保持するために対応するペアで配置されるグリップアームを備え、グリップ装置(2)は、前記グリップアーム(4)からは独立している少なくとも1つの位置決めエレメント(6)を備える。前記位置決めエレメント(6)は、把持される容器(3)を前記グリップ位置において少なくとも1つの軸に沿って位置決めするように設計されている。 (もっと読む)
搬送装置
【課題】被搬送物を設定された複数の特定角度に切り換えることができる搬送装置を提供する。
【解決手段】回転自在に支承された被搬送物支持具12を設定された複数の特定ロック角度でロックするロック手段27とロック解除用被操作具29が設けられた搬送用走行体1の停止位置には、ロック解除用被操作具29に対して作用するロック解除操作手段40と被搬送物支持具12の回転駆動手段41とが併設され、回転駆動手段41は、被搬送物支持具12の回転軸心と平行な方向に出退移動自在な可動台43上に軸支された駆動用回転体44を備え、この駆動用回転体44には、その偏心位置から突設された駆動ピン45とセンサー46が設けられ、被搬送物支持具12側には、駆動ピン45が嵌合可能な駆動ピン嵌合部23と、この駆動ピン嵌合部23に駆動ピン45が嵌合する以前の駆動用回転体44の回転によりセンサー46が検出できる被検出部24が設けられた構成。
(もっと読む)
搬送位置決め方法及び装置
【課題】周囲4面のうち例えば両側面が複雑な形状のワークに対して汎用性があり、両側面の形状が複雑な多くの機種のワークに対して汎用性がある搬送位置決め方法及び装置を提供すること。
【解決手段】搬送位置決め方法は、搬送されるシリンダブロック1の前方端部2を基準面41に対して当接させるステップS2と、シリンダブロックの側部5に設定された基準点6に対して計測器60のロッド62を基準面と平行に突き当てることにより原点から基準点までの距離を計測するステップS3と、シリンダブロックをカメラ70で撮影することによりシリンダブロックの機種を判別するステップS4と、計測された距離と判別された機種とによりシリンダブロックの中心位置を割り出すステップS5と、割り出されたシリンダブロックの中心位置にローダ30を移動させるステップS6と、を含む。
(もっと読む)
容器受渡し装置
【課題】旋回経路の受取り部と送出し部で、ネック部を把持するグリップアームの高さを変更でき、ネック部の高さ異なる容器の型替えをスムーズに行う。
【解決手段】旋回テーブル24の外周部に、ボトルB1のネック部N1を保持可能な一対のグリップアーム28を有するネック把持装置25が一定間隔ごとに配設され、搬入コンベヤと充填装置の間で容器を受渡しする旋回式の搬入ホイール装置11であって、グリップアーム28を昇降可能なスライド筒34を設け、旋回経路の所定位置に、スライド筒34に設けられた昇降カムローラ35が当接される上限規制カム42と下限規制カム41とを設け、ネック把持装置25に、スライド筒34を昇降させて昇降カムローラ35を上限規制カム42または下限規制カム41に当接させる昇降用シリンダ54を設け、下限規制カム41を昇降して高さ調整可能な把持位置調整装置46を設けた。
(もっと読む)
キャッパ
【課題】シュート12からキャップ10を取り出すための機構をキャッパ6の回転体16に設けて、構造を簡略化する。
【解決手段】キャッパの回転体の下部に容器載置台20と容器保持手段22が、上部にキャッピングヘッド24が設けられて一体的に回転する。この回転体に向かって直線状のシュート本体部12Aが延び、その先端が、回転体に沿って折り曲げられたキャップ受け渡し部12Bになっている。シュート本体部の先頭のキャップ10Aに係合する揺動可能なストッパアーム26が設けられている。回転体の各キャッピングヘッドに対応して、揺動可能なキャップ取り出しアーム42が設けられている。このアームがストッパアームによって停止しているキャップを受け渡し部に取り出して、キャッピングヘッドが保持する。
(もっと読む)
パレタイジング設備の受取ステーションとパケット把持器具ならびに受取りステーションからパケット把持器具へのパケットの移転方法
【課題】簡便に製造することが可能であるにもかかわらずパケット把持器具上へのパケットの正確な位置決めが可能となる受取ステーションおよびパケット把持器具を提供する。
【解決手段】各パケット収容室(A,B)に対してキャリッジ(7)上に支承されていて作動位置と後退位置の間で移動可能なそれぞれ1つの制止要素(16,16′)を設置し、前記パケット把持器具(2)によってパケット(4,4′)を移転箇所(D)の手前側停止個所から前記制止要素(16,16′)に対して移動させその制止要素(16,16′)上に接合させることが可能なような形態で、前記制止要素(16,16′)がその作動位置において該当するパケット収容室(A,B)内に突立する。
(もっと読む)
プレス用オートパレタイザ
【課題】ロボットの必要数が少なく、サイクルタイムを大幅に短縮できるプレス用オートパレタイザを提供する。
【解決手段】プレスライン3に沿ってワーク1を一定ピッチで搬送するワーク搬送装置12と、ワーク搬送装置上で隣接する1対のワーク1をセンタリングするセンタリング装置14A,14Bと、ワーク搬送装置の幅方向に隣接しセンタリング装置14A,14Bのプレスライン方向中間位置に位置する移載ロボット16と、ワーク搬送装置の幅方向に隣接しセンタリング装置のプレスライン方向同一位置に位置するパレットステーション18A,18Bとを備える。移載ロボット16は、上流側及び下流側のセンタリング装置14A,14B上のワーク1をそれぞれのパレットステーション18A,18Bにそれぞれ上流側回り及び下流側回りで移載する。
(もっと読む)
長尺材の取出装置
【課題】綾となって絡まり合っている長尺材であっても確実に1本ずつ取り出すことができる長尺材の取出装置を提供する。
【解決手段】本発明の長尺材の取出装置10は、所定本数の長尺材Bを並列させた状態で載置可能な載置手段11と、前記載置手段11に載置された長尺材Bが並列方向の移動するのを規制する規制手段34と、前記載置手段11から長尺材Bを1本ずつ取り出す取出手段13と、を備える。載置手段11は、載置した各長尺材を自転させる載置台32を備える。
(もっと読む)
サブパレット移載装置
【課題】基準パレット内からサブパレットを簡単に取り出すことができ、また取り出したサブパレットを確実に基準パレット上に移載することができるサブパレット移載装置を提供する。
【解決手段】シリンダユニットを駆動することで、操作爪片107を前進させ基準パレット10に設けたストッパ18をスプリングに抗して水平状態にし、サブパレット20を引き出し可能な状態にする。また予め昇降部材110を最下限位置にし、シリンダユニット123を駆動し、ロッドを前進せしめ、ロッド先端の係合片をサブパレット20のT字溝に進入させ、次いでモータ(駆動部材)によってロッドを90°回動せしめることで係合片をT字溝に係合させ、次いでシリンダユニット123を逆方向に駆動し、収納空間Sからサブパレット20をサブパレット受渡しユニット130上に引き出す。
(もっと読む)
ワーク移載装置およびワーク移載方法
【課題】使用するアクチュエータ数の削減に好適なワーク移載装置を提供する。
【解決手段】ワーク搬送手段5おける昇降手段6を、走行手段4に対して走行方向に相対移動可能であり且つ弾性手段(17)により相対移動範囲の中立位置に復帰付勢するよう配置され、前記走行手段4の受取り位置Bおよび受渡し位置Cへの所定以上の接近により、搬送路に設けたストッパ10により停止されて走行手段4がストローク限に向かって前記中立位置から離れる方向に相対移動することを利用してフィンガ爪8を下降させ、走行手段4の受取り位置Bおよび受渡し位置Cからの離脱により、搬送路に設けた前記ストッパ10による相対移動状態から中立位置に復帰することを利用してフィンガ爪8を上昇させるようにした。
(もっと読む)
非円形断面型コンテナの搬送装置
【課題】空間占拠を格段に減らし、コンテナの搬送精度を上げる。
【解決手段】この装置は、2つの搬入コンベヤと、2つの別個の搬送流れを再統合する再統合スターホイール5と、再統合スターホイール5と共働する補助スターホイール6と、再統合スターホイール5に装着され、コンテナが再統合スターホイール5に転送される前に、コンテナがピットに対して正確な方向決めがなされている状態にするために、補助スタホイール6の対応ピットに収納されているコンテナに作用する第一の連結手段50と、補助スターホイール6に装着され、再統合スタホイール5が回転している間、コンテナをピットに対して正確な方向決めが維持されるように、再統合スタホイール5の対応ピットに収納されているコンテナに作用する第二の連結手段とからなる。第一、第二の連結手段50,60は、コンテナ2が統合エリアに到達した時点で作動する。
(もっと読む)
ワーク移送装置
【課題】ワーク載置数及びピッチが異なるキャリア間でワークを効率よく移し替えが行なえるワーク移送装置を提供する。
【解決手段】可動バッファ部5に載置される最大ワーク載置数は第2のキャリア3の載置数の倍数N(N≧2の整数)であり、第2のピックアップ7が可動バッファ部5からワークWをピックアップする前に第1のピックアップ6が第1のキャリア1から可動バッファ部5の空いた移載領域へワークWを必要な数だけ移載する。
(もっと読む)
1 - 20 / 28
[ Back to top ]