
Fターム[3F072GG14]の内容
特殊移送 (6,503) | その他の目的、特徴 (461) | ストッパ、物品係止部材 (71) | 緩衝機構付 (10)
Fターム[3F072GG14]に分類される特許
1 - 10 / 10
容器搬送装置
【課題】回転部分のブッシュの摩耗を抑え、メンテナンスの手間とコストを抑える。
【解決手段】グリッパ20を開閉するためにカム15や開度増大装置17のカム部201、スプリング80から押圧力や引張力が作用すると、その押圧力や引張力によるモーメントは、シャフト部材90を介してスライドブッシュ60に主に作用し、シャフト部材91にはほとんど作用しない。また、スライドブッシュ60もグリッパ20の中心線上に配置されているため、偏荷重が作用しにくい。さらに、スライドブッシュ60は、容器100を保持するグリッパ20の外周側端部20aから最も離れた、内周側端部20bに位置している。
(もっと読む)
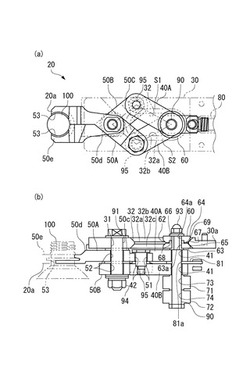
グリッパ搬送装置

【課題】過負荷が加わった場合にはこれを回避することができるとともに、その回避状態を保持できるようにすることで、原因の追求を容易に行うことができるグリッパ搬送装置を提供すること。
【解決手段】移動搬送体にアーム部11を介して取り付けられ円筒体であるプリフォームPを把持する開閉可能なグリッパ部21を有するグリッパ搬送装置で、グリッパ部21を開閉平面と垂直な軸部13を介してアーム部11に回動可能に設けるとともに、この軸部13に過負荷による回動を許容するとともに、回動変位状態を保持可能な回動規制手段31を設けることで、回動規制手段31によってグリッパ部21を開閉平面に垂直な軸部13に対して回動を許容して過負荷による損傷を回避するようにし、その変位状態を保持することで、復帰しないようにして過負荷による変位が生じたことを知るようにしている。
これにより、自動復帰することによる他の箇所への損傷を防止し、異常品に気づかず搬送を続行することを防止するようにしている。
(もっと読む)
スパウト付き袋の搬送装置
【課題】スパウト付き袋の連続製造装置から取り出したスパウト付き袋を、下流側のレール式搬送装置に引き渡す場合に、レール式搬送装置でトラブルが発生した場合でも、連続製造装置においてシール不良等が発生しないようにする。
【解決手段】周囲にスパウト保持部が複数設置され、間欠回転する受渡しローター25の下流側に、受け渡しレール装置16を設置する。スパウト保持部からプッシャーで突き出されたスパウト付き袋のスパウトは、受け渡しレール装置16の受け渡しレール54に入り、続いて固定搬送レール71に送られる。受け渡しレール装置16は、受け渡しレール54を通常のスパウト受取り位置からスパウトの受け取りを回避する退避位置に移動させる駆動手段を有する。
(もっと読む)
プレス用オートパレタイザ
【課題】ロボットの必要数が少なく、サイクルタイムを大幅に短縮できるプレス用オートパレタイザを提供する。
【解決手段】プレスライン3に沿ってワーク1を一定ピッチで搬送するワーク搬送装置12と、ワーク搬送装置上で隣接する1対のワーク1をセンタリングするセンタリング装置14A,14Bと、ワーク搬送装置の幅方向に隣接しセンタリング装置14A,14Bのプレスライン方向中間位置に位置する移載ロボット16と、ワーク搬送装置の幅方向に隣接しセンタリング装置のプレスライン方向同一位置に位置するパレットステーション18A,18Bとを備える。移載ロボット16は、上流側及び下流側のセンタリング装置14A,14B上のワーク1をそれぞれのパレットステーション18A,18Bにそれぞれ上流側回り及び下流側回りで移載する。
(もっと読む)
ワーク移載装置およびワーク移載方法
【課題】使用するアクチュエータ数の削減に好適なワーク移載装置を提供する。
【解決手段】ワーク搬送手段5おける昇降手段6を、走行手段4に対して走行方向に相対移動可能であり且つ弾性手段(17)により相対移動範囲の中立位置に復帰付勢するよう配置され、前記走行手段4の受取り位置Bおよび受渡し位置Cへの所定以上の接近により、搬送路に設けたストッパ10により停止されて走行手段4がストローク限に向かって前記中立位置から離れる方向に相対移動することを利用してフィンガ爪8を下降させ、走行手段4の受取り位置Bおよび受渡し位置Cからの離脱により、搬送路に設けた前記ストッパ10による相対移動状態から中立位置に復帰することを利用してフィンガ爪8を上昇させるようにした。
(もっと読む)
衝撃吸収機構、及び該機構を備えた機械装置
【課題】 暴走する移動体の衝突による衝撃を短ストローク、低い減速度で吸収して移動体を停止させる衝撃吸収機構を提供する。
【解決手段】 移動体8の移動方向に対して傾斜した平面または曲面からなる凹部の傾斜面を移動体8に向けて開口させたホルダ部1と、前記傾斜面に対応する傾斜面からなる凸部をホルダ部1に対向して配置されたストッパ部2と、ホルダ部1とストッパ部2の両傾斜面の間に挟持される弾性体の緩衝部3とから構成され、ストッパ部2に衝突する移動体8の衝撃力を、緩衝部3の変形により吸収する。ストッパ部2の凸部の先端から延びるリセッタシャフト4と、リセッタシャフト4を貫通させて保持するホルダ部1のホルダ穴5とからなるリセット機構を設けることにより、衝突後にホルダ穴5を通過して延びるリセッタシャフト4の先端を押し戻して衝突前の状態に復帰させることができる。
(もっと読む)
飲料充填システム、カム動作装置
【課題】 カムローラの偏摩耗等を防止し、耐久性、装置の信頼性を向上させるとともに、環境のクリーン度を維持できる技術を提供することを目的とする。
【解決手段】 カムプレート68、69の手前に衝撃緩和部材120Aを設け、回転体の回転に伴い、カムプレート68、69にカムローラ67が当たるに先立ち、カムローラ67を、衝撃緩和部材120Aの板状部材121に当てるようにした。これにより、カムローラ67は、板状部材121との間に生じる摩擦により、回転を始める。また、板状部材121は傾斜面を形成するようにし、しかも付勢部材122を弾性変形可能とすることで、カムローラ67が板状部材121に衝突したときに、付勢部材122によってその衝撃を吸収するようにした。
(もっと読む)
ワーククランパ及びワーク搬送用治具
【課題】製造コストがそれほど嵩むことなく、簡単な構成で、ワークを容易に装着させることができ、しかも、搬送中に外力が作用しても脱落しないようにする。
【解決手段】可撓性板3の片端側が剛性板2に重ねられて熔接固定され、剛性板と可撓性板の間にその自由端3a側から差し込まれるワークWを前記可撓性板3の弾撥力により挟持させるワーククランパCは、可撓性板3の自由端3a側が内側に鋭角的に折り曲げられ、その頂点3bから固定端3c側が自由端3aを剛性板2側に付勢する板バネ部3dとなり、その頂点3bから自由端3aまでがその先端エッジ3eをワークWに喰い込ませる折返部3fとなったフック状カンチレバーに形成され、剛性板2には、可撓性板3の上からその板バネ部3dを剛性板2側に付勢する補強用平板カンチレバー4を熔接固定した。
(もっと読む)
容器グリップ装置
【課題】ボトルを搬送する際に発生するボトルの遠心力傾斜を抑制し、搬送中のボトルの姿勢が安定すると共にボトル受渡し時における把持ミスが生ずることのない容器グリップ装置を提供する。
【解決手段】回転式のボトル搬送装置により搬送されるボトルのボトルネック部Nを把持する容器グリップ装置であって、ボトルネック部に係合する押圧部材11a、11bと、ボトルの環状ネックリング部140に係合する位置決定部材13と、環状ネックリング部上面に係合する傾斜防止フィンガー15とを設けたことを特徴とする。また、押圧部材と位置決定部材とでボトルネック部を把持したときに、力点21、22に垂直方向の差を生ぜしめ、遠心力に抗してボトルを傾斜させないようにした。
(もっと読む)
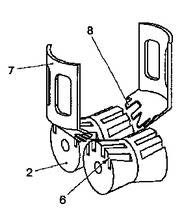
物体を搬送する装置
果物等の物体(1)を搬送する装置であって、第1の循環コンベヤと、第2の循環コンベヤとを備える。第1の循環コンベヤにはディアボロ等の搬送部材(2)が連結され、コンベヤの走行方向から見たときに一方は下流に、他方は上流に配置される少なくとも2つの搬送部材によって搬送位置が決定され、第2の循環コンベヤには、搬送部材同士の間から物体を受け取る複数のグリッパハンド(7)を備える物品キャリアが接続され、第2のコンベヤは第1のコンベヤの直近に配置される。搬送部材は、少なくとも一つのグリッパハンドによる物体の受け取り時に物体を支持する面に、コンベヤに直交する方向の複数の溝(4)を備え、グリッパハンドはそれぞれ複数のフィンガー(8)を備える。フィンガー同士の間の距離は、搬送部材の溝同士の間の距離に対応し、グリッパハンドによる物体の受け取り時に、フィンガーは少なくとも部分的に物体の下方であって溝の溝端部(6)内に位置する。
 (もっと読む)
(もっと読む)
1 - 10 / 10
[ Back to top ]