
Fターム[3F072KA01]の内容
Fターム[3F072KA01]の下位に属するFターム
プッシャコンベア (6)
トリッパ、リクレーマ型コンベア (3)
物品保持コンベア、グリッパコンベア (25)
トロリーコンベア、吊持コンベア (11)
キャリヤ付コンベア (41)
保持具、吊持具、キャリヤが左右摺動
Fターム[3F072KA01]に分類される特許
1 - 20 / 210
ターンテーブル装置および搬送設備
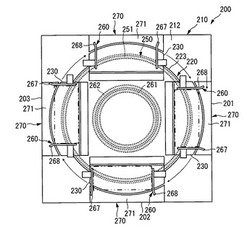
【課題】搬送する物品の大きさの変更に対応する。
【解決手段】第1ターンテーブル装置200は、食パンXA1を受け入れる入口201と、食パンXA1を送り出す第1出口202および第2出口203と、鉛直な回転軸回りに回転自在に設けられ、入口201で受け入れた食パンXA1を載せて第1出口202または第2出口203まで搬送するテーブル230と、このテーブルに載せて搬送中の食パンXA1の側面を案内するサイドガイド267,268を備える。サイドガイド268は、回転軸の同心円の接線方向に移動可能な構成であり、テーブル230に載せた食パンXA1を側方へ押して上流のラインにおける食パンXA1の搬送基準とは異なる基準で下流のラインへ送り出すことを可能にする。
(もっと読む)
ワーク移載装置

【課題】高さが変動する段積み状態のワークを順次吸着し移載することができる設定調整が簡単で、安価なワーク移載装置を提供する。
【解決手段】ワーク12を落下載置させるワーク移載装置10であって、吸着ヘッド下降当接停止機構18と、吸着ヘッド下降近接部停止機構19を有し、前記機構は、緩衝器20、支持板21、透過型センサを備え、これによる検知による信号で、エアシリンダ16の電磁弁23のソレノイドへの通電を止めるような機構からなると共に、後記機構は、エアシリンダ15に上昇端スイッチ24と、下降端スイッチ25を備え、この通電による停止と同時に吸引を解除する機構からなり、前記機構の作動中は、上昇端スイッチ24を起動させ下降端スイッチ25を停止し、後記機構の作動中は、上昇端及び下降端スイッチ24、25の通電を起動させワーク12を吸着すると共に、可動する所定位置に載置する。
(もっと読む)
物品搬送方法及び物品搬送装置
【課題】物品や容器のサイズ或いは容器内への物品の詰め合わせ状態などに応じた複数の物品の供給形態に対応可能な物品搬送方法及び物品搬送装置を提供する。
【解決手段】所定間隔毎に搬送される物品搬送コンベヤ2上の複数の物品1を吸着手段で吸着し、所定間隔毎に搬送される容器搬送コンベヤ4の第一コンベヤ5上の容器3に各物品1を載置して該容器3と共に搬送する際に、指定手段により第一の制御プログラムに切り替えられた状態では複数の物品1の夫々に対応した位置に配備された吸着具が各物品1を夫々吸着してまとめて容器3の一つに載置し、また、指定手段により第二の制御プログラムに切り替えられた状態では物品1を夫々吸着している吸着具の間隔を容器搬送コンベヤ4の第一コンベヤ5上の複数の容器3の間隔に合わせて該複数の容器3に夫々の物品を載置する。
(もっと読む)
物品搬送装置
【課題】簡略化した構造のロボットハンドを使用しても、容器に物品を刺身重ね状に綺麗に載置することが可能な物品搬送装置を提供する。
【解決手段】容器搬送コンベヤ4は、幅方向Yで水平面に対し傾斜した載置面16aに容器3を載置して搬送する第一搬送部15と、第一搬送部15で物品1が載置された容器3を受渡部18に搬送する際に容器3を傾斜状態から略水平状態に変換する第一姿勢変換部17と、受渡部18,22で容器3を略水平状態から第一搬送部15とは逆向きに傾斜させる第二姿勢変換部23と、容器3を略水平状態に戻して搬送する搬送ベルト21とを備えている。ロボットは、載置面16aに傾斜姿勢で載置された容器3に複数の物品1を載置する際に、第一搬送部15で水平面に対し物品1のなす角度を、搬送ベルト21にて略水平姿勢にある容器3内で各物品1が水平面に対しなす角度より小さくして、各物品1を刺身重ね状に容器3に載置する。
(もっと読む)
製品回収装置
【課題】製品を搬送帯から回転テーブルに簡単且つ安定して受け渡すことができる製品回収装置を提供することを課題としている。
【解決手段】回転駆動される搬送帯11の駆動力入力部9と、回転駆動自在に支持される回転テーブル21の駆動力入力部26とを連係手段29によって連係し、連係手段29を介して前記搬送帯11及び前記回転テーブル21の駆動を行う1つのアクチュエータ12によって前記搬送帯11と前記回転テーブル21の両方を駆動し、搬送帯11によって搬送される製品43を、回転テーブル21に受け渡して回収する。
(もっと読む)
物品搬送装置
【課題】任意の間隔や向きで搬送されてきた物品を高速に搬送する。
【解決手段】物品認識手段により得た物品10の位置に関する情報に基づき、物品10を吸着する順序を定めて回転体20の回転中にアーム32を該情報に応じた回動角度で回動させて物品10を吸着具34で吸着する。物品10の向きに関する情報に基づき、物品10が載置位置Xにおいて特定の方向に向くように吸着具34を回転させて、物品10を載置位置Xを載置する。
(もっと読む)
物品搬送装置
【課題】任意の間隔で搬送されてきた物品を高速で搬送する。
【解決手段】物品認識手段により得た情報に基づき、回転体20の回転中にアーム32を回動させて吸着予定の物品10に対向する吸着位置Uにおいて該物品10を吸着具34で吸着するに際して、上昇位置と下降位置との間の中途範囲において吸着予定の物品10)の斜め上方から前記吸着位置Uを含む下降位置付近に向けて該吸着具34を吸引しながら下降させ、該下降位置付近にて中途範囲よりも吸着具34を遅く下降させるようにアーム昇降モータを変速制御して、物品10を吸着する。
(もっと読む)
物品処理装置
【解決手段】 直列に配置された分割コンベヤ3A〜3C毎にそれぞれロボット4A〜4Cが設けられている。各ロボットは各分割コンベヤに供給された物品を、例えば10本を一まとめとしてバケットコンベヤ5の1つのバケット5a内に受け渡すことができるようになっている。各分割コンベヤは、搬送コンベヤ2から多くの物品が供給されている状態ではそれぞれ連続して運転されているが、各分割コンベヤへの物品の供給がなくなると停止されるようになっている。各分割コンベヤは、物品が新たに供給される都度間欠的に運転され、それによって各分割コンベヤ上に所定数の物品を貯溜させるようになる。各割コンベヤ上に所定数の物品が貯溜されたら、該物品は一まとめとしてバケット内に受け渡される。
【効果】 各割コンベヤ上に所定数の物品を貯溜することができるので、各ロボットによる所定本数ずつの処理を効率的に行える。
(もっと読む)
移送装置
【課題】より小さな所要スペースしか必要としない択一的な移送装置を提供する。
【解決手段】マンドレルホイール3と移送ホイール11とが、それぞれ互いに平行な回転軸線3’,11’を中心にして回転駆動されていて、その周辺の範囲にそれぞれ対象物1のための保持装置5,7を有しており、保持装置5と、マンドレルホイールの回転軸線との間隔が可変であり、マンドレルホイール3と移送ホイール11とは、対象物が搬送装置4から移送ホイール11を介して保持装置5へ引き渡され得るように互いに隣接して配置されており、移送ホイール11の保持装置7が、それぞれ移送旋回アーム12を介して旋回軸線13を中心にして旋回可能に取り付けられており、該旋回軸線が、移送ホイールの回転軸線11’に対して平行に延びており、さらに各保持装置7の旋回軸線13が、回転軸線11’に対して同一の不変の間隔を有している。
(もっと読む)
容器搬送装置
【課題】回転部分のブッシュの摩耗を抑え、メンテナンスの手間とコストを抑える。
【解決手段】グリッパ20を開閉するためにカム15や開度増大装置17のカム部201、スプリング80から押圧力や引張力が作用すると、その押圧力や引張力によるモーメントは、シャフト部材90を介してスライドブッシュ60に主に作用し、シャフト部材91にはほとんど作用しない。また、スライドブッシュ60もグリッパ20の中心線上に配置されているため、偏荷重が作用しにくい。さらに、スライドブッシュ60は、容器100を保持するグリッパ20の外周側端部20aから最も離れた、内周側端部20bに位置している。
(もっと読む)
部品搬送装置
【課題】トレイに載置された電子部品の載置状態の検出を、迅速かつ適切に行うことのできる部品搬送装置を提供する。
【解決手段】トレイ検査装置は、トレイ18に載置されたICチップの載置状態を検査する。トレイ検査装置は、トレイ18を待機させる待機位置P1及びトレイ18との間でICチップの給排を行う作業位置P2の間でトレイ18を往復移動させるトレイ搬送装置C1〜C6と、トレイ搬送装置C1〜C6によるトレイ18の搬送路に設けられるとともに、トレイ18の幅に対応する検出範囲を有してICチップの載置状態を非接触にて検出するラインセンサー46と、ラインセンサー46による検出情報に基づいてICチップの載置状態の適否を判定するトレイ状態判定部とを備える。
(もっと読む)
ピッキングシステム
【課題】作業効率の向上を図ること。
【解決手段】複数のカメラ3a,3bが、コンベアの搬送路上の異なる領域をそれぞれ撮像し、制御装置5が、カメラ3a,3bによって撮像された画像に基づいて搬送路上のワークを検出するとともに、検出したワークの保持動作をロボット2a,2bに対して指示し、ロボット2a,2bが、制御装置からの指示に従って保持動作および移動動作を行う。特に、制御装置5は、ワークの保持動作を、カメラ3a,3bによって撮像される領域ごとに対応付けられたロボット2a,2bに対して指示する。
(もっと読む)
ピッキングシステム
【課題】ワークの取りこぼしを防止すること。
【解決手段】ロボット2が、コンベアによって搬送されるワークを保持する保持動作および保持したワークを所定の場所へ移動させる移動動作を行い、メインカメラ3aが、搬送路上の領域を撮像し、制御装置5が、メインカメラ3aによって撮像された画像に基づいて搬送路上のワークを検出するとともに、検出したワークの保持動作をロボット2に対して指示する。また、制御装置5の重なり検出部514が、ワークの重なりを検出し、制御装置5の動作指示部515が、重なり検出部514によってワークの重なりが検出された場合に、重なったワークの保持動作をロボット2に対して指示する。
(もっと読む)
ピッキングシステム
【課題】複数のワークを向きを揃えて載置する場合に、複数のワークの保持を短時間で行うこと。
【解決手段】ロボット2a,2bは、ワークwを保持する複数の保持部23a,24a,23b,24bと、アーム先端部21a,21bに対して回転可能に設けられ、複数の保持部23a,24a,23b,24bを支持する支持部22a,22bとを備える。また、制御装置は、保持部23a,24a,23b,24bを用いて保持したワークwごとに、かかるワークwの向きが所定の向きとなるように支持部22a,22bを所定量回転させたうえでかかるワークwを所定の場所へ載置する載置動作の実行をロボット2a,2bに対して指示する。
(もっと読む)
物品移載装置
【課題】 狭いスペースでも使用できる物品移載装置を提供する。
【解決手段】 フレームと、フレームに往復移動可能に設けられた移動体と、移動体の表面側と裏面側に周回されたベルトを備え、移動体はその駆動側を縦移動させて送り出すと先端側が先方に横移動し、駆動側を縦移動させて引き戻すと先端側が横移動して引き戻され、ベルトは周回方向任意箇所がフレームに固定されてリング状であり、移動体はその駆動側が縦移動する先端側が横移動し、ベルトは移動体の先端側が先方に横移動すると同方向に繰り出されてベルト先方の物品をベルトの上に掬い上げることができ、移動体の駆動側が縦方向に引き戻されて先端側が横方向に引き戻されると、その戻り方向に引き戻されてベルトの上の物品をベルトの先方に降ろすことができるようにした。
(もっと読む)
選果システム
【課題】移送装置による載置台からトレイへの青果物の移送能率の低下を極力抑制するとともに、載置台からトレイへ青果物を移送する際に移送装置の吸着部に吸着された青果物が当該吸着部から落下することを抑制することができる選果システムを提供することを課題とする。
【解決手段】載置台搬送装置51によって搬送される載置台5に載置される青果物6を吸着部66で吸着してトレイ8へ移送する移送装置60を備え、載置台5に載置される青果物6をトレイに詰める、選果システム1であって、移送装置60は、青果物6を吸着した状態で吸着部66が上方へ移動するときの平均速度、または、青果物6を吸着した状態で吸着部66が下方へ移動するときの平均速度が、青果物6を吸着した状態で吸着部66が水平方向へ移動するときの平均速度に比べて遅い速度となるように構成される。
(もっと読む)
選果システム
【課題】移送装置の吸着部にて青果物のがく片部を吸着する際に、載置台の側方からその中央側に向かうように吸着部を移動させたときに当該吸着部が青果物が載置される載置台に当接することを防止して、青果物を確実に吸着してトレイへ確実に移送することができる選果システムを提供することを課題とする。
【解決手段】載置台搬送装置51によって搬送される載置台5に載置される青果物6のがく片部6bを吸着部66で吸着してトレイ8へ移送する移送装置60を備え、載置台5に載置される青果物6をトレイ8に詰める、選果システム1であって、移送装置60の吸着部66にて青果物6のがく片部6bを吸着する際に、載置台5の側方からその中央側に向かうように吸着部66を移動させたときに、吸着部66が載置台5に当接しない位置に青果物6を押上げる、押上げ装置80を有する。
(もっと読む)
搬送装置
【課題】被搬送物を複数の搬送路に分岐又は複数の搬送路から合流させながら搬送する搬送装置であっても、迅速に被搬送物を搬送することができる搬送装置を提供すること。
【解決手段】旋回テーブル2を旋回動作及び昇降動作を同期して行うようにした上段旋回テーブル21及び下段旋回テーブル22で構成し、上段旋回テーブル21及び下段旋回テーブル22が下降した第1旋回位置T1にあるときに、上段旋回テーブル21と第1の搬送路11、下段旋回テーブル22と第2の搬送路12がそれぞれ接続され、上段旋回テーブル21及び下段旋回テーブル22が上昇した第2旋回位置T2にあるときに、上段旋回テーブル21と第3の搬送路13、下段旋回テーブル22と第1の搬送路11がそれぞれ接続されるようにする。
(もっと読む)
板状部材反転システム及びその反転移送方法
【課題】 高速で板状部材を反転させることができると共に上面を傷つけることなく板状部材を反転することができる板状部材反転システムを提供する。
【解決手段】 複数の板状部材を順次反転して移送する板状部材反転システムは、第2デルタロボット60と、反転装置61と、第2移送装置第2移送装置62とを備えている。第2デルタロボット60は、板状部材12を順次保持して反転装置61に移載するようになっている。反転装置61は、第2デルタロボット60により前記板状部材が水平姿勢で移載され、移載された前記板状部材12をその上面を開放した状態で吸着保持して板状部材12の上下面を反転させるようになっている。また、第2移送装置62は、反転装置61から反転された板状部材12を受取り、その板状部材12を反転された状態で且つ水平状態で移送するようになっている。
(もっと読む)
選果システム
【課題】選果システムにおける移送装置による載置台からトレイへの青果物の移送能率を向上させることができる技術を提供することを課題とする。
【解決手段】載置台搬送装置51によって搬送される載置台5に載置される青果物6を、トレイ搬送装置53によって搬送されるトレイ8へ移送する移送装置60を備え、載置台5に載置される青果物6を等級や階級毎に前記トレイ8に詰める、選果システム1であって、移送装置60は、青果物6を吸着する吸着部66を複数個備え、複数個の吸着部66・66・・・にて複数個の青果物6・6・・・を一度に吸着可能に構成される。
(もっと読む)
1 - 20 / 210
[ Back to top ]