
Fターム[3F072KD23]の内容
特殊移送 (6,503) | 物品保持移載手段(主に往復動)(その他) (1,147) | アーム式 (103)
Fターム[3F072KD23]の下位に属するFターム
水平軸まわり (11)
Fターム[3F072KD23]に分類される特許
1 - 20 / 92
ワーク移載装置
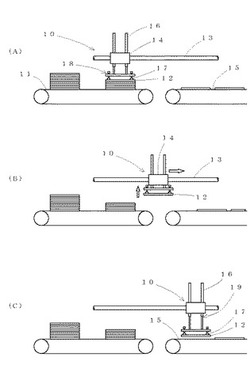
【課題】高さが変動する段積み状態のワークを順次吸着し移載することができる設定調整が簡単で、安価なワーク移載装置を提供する。
【解決手段】ワーク12を落下載置させるワーク移載装置10であって、吸着ヘッド下降当接停止機構18と、吸着ヘッド下降近接部停止機構19を有し、前記機構は、緩衝器20、支持板21、透過型センサを備え、これによる検知による信号で、エアシリンダ16の電磁弁23のソレノイドへの通電を止めるような機構からなると共に、後記機構は、エアシリンダ15に上昇端スイッチ24と、下降端スイッチ25を備え、この通電による停止と同時に吸引を解除する機構からなり、前記機構の作動中は、上昇端スイッチ24を起動させ下降端スイッチ25を停止し、後記機構の作動中は、上昇端及び下降端スイッチ24、25の通電を起動させワーク12を吸着すると共に、可動する所定位置に載置する。
(もっと読む)
パン型造粒機用の大塊処理装置

【課題】パン型造粒機において、その運転中に自動的に大塊を除去することが可能な塊処理装置を提供する。
【解決手段】回転して粉体を造粒するパン23が備えられたパン型造粒機21用の大塊処理装置1であって、大塊を掬い上げる掬上げ治具3と、先端に掬上げ治具3が着脱自在に取り付けられ、パン23の回転方向に沿って掬上げ治具3をパン23に挿入させて大塊を掬い上げさせるロボットアーム2と、を具備してなることを特徴とするパン型造粒機用の大塊処理装置1を採用する。
(もっと読む)
物品搬送装置
【課題】簡略化した構造のロボットハンドを使用しても、容器に物品を刺身重ね状に綺麗に載置することが可能な物品搬送装置を提供する。
【解決手段】容器搬送コンベヤ4は、幅方向Yで水平面に対し傾斜した載置面16aに容器3を載置して搬送する第一搬送部15と、第一搬送部15で物品1が載置された容器3を受渡部18に搬送する際に容器3を傾斜状態から略水平状態に変換する第一姿勢変換部17と、受渡部18,22で容器3を略水平状態から第一搬送部15とは逆向きに傾斜させる第二姿勢変換部23と、容器3を略水平状態に戻して搬送する搬送ベルト21とを備えている。ロボットは、載置面16aに傾斜姿勢で載置された容器3に複数の物品1を載置する際に、第一搬送部15で水平面に対し物品1のなす角度を、搬送ベルト21にて略水平姿勢にある容器3内で各物品1が水平面に対しなす角度より小さくして、各物品1を刺身重ね状に容器3に載置する。
(もっと読む)
部品供給装置の保持ヘッド構造
【課題】部品導入時の吸引力と部品送出時の送出力を効果的に利かせることができる部品供給装置の保持ヘッド構造の提供。
【解決手段】保持ヘッド19の保持凹部21に、導入開放部22と送出開放部47と保持壁44と底面46が設けられ、部品1を目的箇所へ送出する送出手段48が保持ヘッド19に設けられ、部品1を保持凹部21内へ導入する磁石55を、該磁石55の吸引力が部品1の重心点Gと底面46の間に作用する箇所Sに配置して、部品1を受け止める保持壁44に対する部品1の吸引力と部品1が着座する底面46に対する部品1の吸引力を発生させるように構成した。
(もっと読む)
ピックアップ装置
【課題】上下方向に複数枚のトレイが積み上げてのその積層体が傾いても、最上段のトレイを安定して順次ピックアップしていくことができるピックアップ装置を提供する。
【解決手段】上下方向に積み重ねられた複数のトレイ11に対して、その最上段トレイ11Aをピックアップするピックアップ装置である。上下方向に積み重ねられた複数トレイ11が載置される昇降台12と、昇降台12の上昇によって上昇してきた最上段トレイ11Aを保持する複数のトレイ保持機構13と、水平面に対する最上段トレイ11Aの傾斜に対応して各保持機構位置を上下方向に変位させる倣い機構14とを備える。
(もっと読む)
ワーク保持装置
【課題】測定や加工等を行う装置に対し、ワークの受け渡しを容易に行なえるようにしたワーク保持装置を提供する。
【解決手段】円柱型のワークWの両端面を挟持し保持するワーク保持装置1であって、ワークWの両端面を挟持する一対のチャック部5,5を備える。一対のチャック部5,5の各々に対し、ワークWの端面の内側面ではなく該内側面の外側に位置する外側面のみを挟持できるようにコ字型部18を形成し、一対のチャック部5,5のコ字型部18でワークWの端面の外側面を挟持できるようにする。ワーク保持装置1からワーク測定装置19にワークWを受け渡す際、ワーク測定装置19のワーククランプ軸21,21でワークWの端面の外側面でなく内側面を挟持させ、ワーク保持装置1からワーク測定装置19へワークWを容易に受け渡すことが可能となる。
(もっと読む)
把持装置及びワーク搬送装置
【課題】重ねられ通気性を有する板状ワークであっても確実に把持し得る把持装置及びワーク搬送装置の提供。
【解決手段】板状ワークの一方の面側に対向可能な対向面11及び該対向面11に対し該対向面11の面直方向に突出すると共に該対向面11に沿う所定方向に近接離間可能な一対の爪部12を備える把持部10と、板状ワークの一方の面側に対向面11が当接したか否かを検出する第1検出部20と、を有し、第1検出部20は、板状ワークの一方の面側に当接可能な大きさの板面21aを備えて、該板面21aが、対向面11と同一面上に位置する第1の位置と、対向面11から面直方向に突出した第2の位置と、の間において移動可能な板状部材21を有する把持装置1を採用する。
(もっと読む)
ピッキングシステム
【課題】作業効率の向上を図ること。
【解決手段】複数のカメラ3a,3bが、コンベアの搬送路上の異なる領域をそれぞれ撮像し、制御装置5が、カメラ3a,3bによって撮像された画像に基づいて搬送路上のワークを検出するとともに、検出したワークの保持動作をロボット2a,2bに対して指示し、ロボット2a,2bが、制御装置からの指示に従って保持動作および移動動作を行う。特に、制御装置5は、ワークの保持動作を、カメラ3a,3bによって撮像される領域ごとに対応付けられたロボット2a,2bに対して指示する。
(もっと読む)
物品移載装置
【課題】 狭いスペースでも使用できる物品移載装置を提供する。
【解決手段】 フレームと、フレームに往復移動可能に設けられた移動体と、移動体の表面側と裏面側に周回されたベルトを備え、移動体はその駆動側を縦移動させて送り出すと先端側が先方に横移動し、駆動側を縦移動させて引き戻すと先端側が横移動して引き戻され、ベルトは周回方向任意箇所がフレームに固定されてリング状であり、移動体はその駆動側が縦移動する先端側が横移動し、ベルトは移動体の先端側が先方に横移動すると同方向に繰り出されてベルト先方の物品をベルトの上に掬い上げることができ、移動体の駆動側が縦方向に引き戻されて先端側が横方向に引き戻されると、その戻り方向に引き戻されてベルトの上の物品をベルトの先方に降ろすことができるようにした。
(もっと読む)
ドラム缶のハンドリング装置
【課題】倉庫などに収納するドラム缶の数を多くすることができ、衝撃なくドラム缶を壁面に近接して設置できると共に、壁面に近接して設置されたドラム缶を容易に取り出すことができるようにする。
【解決手段】ドラム缶10を挟持及び解放する一対のクランプ部2と、各クランプ部2を互いに近接及び離反するスライド部とを備え、クランプ部2は、ドラム缶10の長手方向の両端面部10cを挟持し、ドラム缶の両端面部10cに当接する自由回転可能な複数のフリーベアリング3を備え、クランプ部2の周囲が、ドラム缶の両端面部10cから突出した鍔部10aに係止して、ドラム缶10を持ち上げ可能とする。
(もっと読む)
搬送装置
【課題】予め決定された軌道に沿って移動する移動部を有する搬送装置において、残留振動を抑制し、移動に要する時間を最小化することのできる搬送装置を提供する。
【解決手段】移動部2を駆動するための駆動部31とワークを載置できる負荷部32、移動部の加速時、定速時および減速時の各軌道情報を生成する軌道情報生成部5と、軌道情報生成部により生成される軌道情報に基づいて駆動部を作動させるコントローラ4とを備える。軌道情報生成部は、駆動部のエネルギ変換効率に関する効率情報記憶手段、移動部の移動に関する特有情報記憶手段、移動部の移動条件情報記憶手段、移動部の運動特性情報記憶手段、前記運動特性に基づき移動部の残留振動を抑制し、移動部の移動に要する時間を算出する演算手段と、前記演算手段により算出された移動に要する時間をパラメータに含む評価関数の値が最小となる軌道情報を決定する軌道情報決定手段とを備える。
(もっと読む)
ワーク移載システム
【課題】ワーク供給量のバラツキに関係なく、オーバーフローしないワーク移載システム。
【解決手段】ワーク4を搬送するピックアップコンベア2と、前記ワーク4を載置するためのトレイ5を搬送するプレイスコンベア3と、前記ワーク4を保持および解放して前記トレイ5へ移載する複数台のロボット7と、前記ワーク4および前記トレイ5の位置、形状および数量をそれぞれ検知するセンサと、前記センサからの情報に応じて前記ピックアップコンベア2および前記プレイスコンベア3の搬送速度と前記ロボット7の動作とを制御するコントローラ8とを有するワーク移載システム10において、複数台の前記ロボット7が、前記ワーク4の搬送方向に沿うように配設され、前記センサが、前記ワーク4の搬送方向における前記ロボット7の上流側と、前記トレイ5の搬送方向における前記ロボット7の上流側とに配設されるワーク移載システム。
(もっと読む)
リーク検査装置
【課題】キャリア内に収容されて搬送される間に液体の充填およびキャッピングが行われた容器が、傷付きやピンホール等の欠陥があった場合に、キャリアごとリジェクトし、その位置に空のキャリアを補充する。
【解決手段】搬送コンベヤに等間隔で設けられたキャリア保持手段8に、キャリア2を保持させて搬送する。容器供給ポジションAでこれらキャリア2に空の容器6を供給し、液体の充填およびキャッピングを行った後、検査ポジションDで、キャリア2とヘッダー40とによって密閉空間42を形成して、この空間42内を真空ポンプ46で吸引し、圧力センサ48によって圧力を測定する。設定した圧力よりも高い圧力が検出されたときには、判定手段50が不良容器と判定して、リジェクトポジションEでキャリア2ごとリジェクトする。その後、補充ポジションFで空のキャリア2を補充する。
(もっと読む)
容器受け渡し方法および容器受け渡し装置
【課題】スクリュー2の螺旋状の溝内にシリンジ等の容器4を直立した状態に保持して搬送する。
【解決手段】等ピッチで螺旋状の溝が形成され、この溝内にシリンジ4を保持して搬送するスクリュー2と、スクリュー2の溝内に保持されているシリンジ4の側面をガイドする、上方の昇降ガイド30および下方の昇降ガイド32と、シリンジ4を保持して前記スクリュー2の溝内に供給する容器保持手段(ロボット8)と、スクリュー2により搬送されるシリンジ4に追従して移動しつつシリンジ4をガイドする追従ガイド52とを備えており、上下の昇降ガイド30、32を、シリンジ4をガイドしない退避位置に移動させて、容器保持手段8が保持しているシリンジ4をスクリュー2に供給し、この保持した状態のまま上下の昇降ガイド30、32をシリンジ4をガイドする位置に移動させる。
(もっと読む)
物品供給装置
【課題】幅の広い平面(第1の面)を上下にして搬送されてきた物品を、90度回転させて立てた状態で箱詰めするために供給する装置を提供する。
【解決手段】供給コンベヤ4によって、幅の広い面を上下にしてランダムな状態で搬送されてきた物品2を、ロボット10で方向を揃えて取り出し載置プレートに載せる。載置プレートを90度回転させて物品2を幅の狭い面(第2の面)が上下に来るように立ち上げ、各載置プレートの間隔を縮小して物品2を集積した後、製品コンベヤ16に追従して移動するプッシャによってこれら物品2を押し出して前記製品コンベヤ16の収容部14内に挿入する。
(もっと読む)
容器処理装置
【解決手段】 容器処理装置1は、各バケット12内に角型の容器2を収容して搬送する第1搬送コンベヤ3と、第1搬送コンベヤ3によって搬送される容器2を撮影するカメラ4と、制御手段7によって作動を制御されて、バケット12内の容器2を吸着して取り出すロボットハンド6Aとを備えている。
カメラ4が撮影した容器2の画像が制御手段7へ伝達されると、制御手段7は、容器2の画像上の中心位置を求め、そこからバケット12の中心12cへ所定量ずらした位置を上記ロボットハンド6Aによる容器2の吸着位置として決定する。ロボットハンド6Aは、バケット12内で傾斜している容器2の側面2Bの上記吸着位置を吸着してバケット12内から取り出す。
【効果】 角型の容器2であってもロボットハンド6Aによって確実に吸着して取り出すことができる。
(もっと読む)
ワーク搬送方法および装置
【課題】姿勢矯正手段を用いる必要なしに、ワークを常に適正に、かつ十分強固に把持して、所期した通りの姿勢で所定の作業ステーションまで、ワークを常に確実に搬送することができるワーク搬送方法を提供する。
【解決手段】中空もしくは中実の軸部3と、軸部3の中間部に設けられたフランジ部4とを具え、基準面1上に載置されるワーク2の、フランジ部4を基準面1と直交する向きに押圧して、該フランジ部4の周面を基準面1上に線もしくは面接触させて、前記軸部3の中心軸線を基準面1に平行にした状態で、開閉駆動される一対のフィンガー12,12により、ワーク2のフランジ部4の周面を把持して、該ワーク2を所定の作業ステーションまで搬送する。
(もっと読む)
補助作業具
【課題】ロボットバンドを利用して食製品の上部にゴマなどの添え物を載置するなどの補助作業を行う補助作業具を提供する。
【解決手段】食製品5を保持自在なロボットハンド19に装着して補助作業を行うための補助作業具であって、食製品5に対して補助作業を行う補助作業部123Aを一端部に備えた補助作業具本体113の他端部に、ロボットハンド19に備えた複数の保持部材63A〜63Fによって把持される被把持部117を備え、この被把持部117は弾性部材によって構成してあり、前記被把持部117の上面に、ロボットハンド19に備えたエアー噴出口97と接続自在なエアー接続部121を備えている。
(もっと読む)
食品搬送システム
【課題】搬送用ロボットを使用して食製品を搬送する搬送システムを提供する。
【解決手段】食製品製造装置3によって製造された食製品5を搬送する食製品搬送手段7と、前記食製品5をを搬送する別個の搬送手段13と、前記食製品搬送手段7から前記別個の搬送手段13へ食製品を搬送する搬送用のロボット15を備えた食品搬送システムであって、前記ロボット15は、前記食製品5を保持する保持面77を備えた複数の保持部材63A〜63Fを開閉自在に備え、かつ前記各保持部材63A〜63Fの前記保持面77を清掃するための清掃手段を、前記ロボットのロボットハンド19に、又は前記ロボットの周囲の適宜位置に備えている。ロボットハンド19に装着して補助作業を行うための複数の補助作業具103を、前記ロボットハンド19に着脱交換自在に備え、前記ロボットハンド19に対して着脱交換するための複数の補助作業具103A〜103Cを備えた補助作業具交換部を備えている。
(もっと読む)
包装機における物品供給装置
【課題】ロボットを用いて物品を高速で搬送する包装機における物品供給装置を提供する。
【解決手段】定速回転する回転体12に所定の角度間隔で支持されるアーム20を有していて、回転体12が回転中において前記アーム20を回動させて、物品を吸着した吸着具25を、前記支持位置より前記回転体12の中心に近づけてから、該吸着具25を第2コンベヤ2の搬送方向に向けて移動させて物品を載置した後、該物品を載置したときの前記回転体の中心と支持位置16とを結ぶ線分に対するアームの角度より大きく広がるようにアーム20を回動させて、前記物品保持領域物品の物品を吸着する。
(もっと読む)
1 - 20 / 92
[ Back to top ]