
Fターム[3F072KD30]の内容
特殊移送 (6,503) | 物品保持移載手段(主に往復動)(その他) (1,147) | 往復動 (266) | X−Y方向移動可能 (20)
Fターム[3F072KD30]に分類される特許
1 - 20 / 20
電界放出ディスプレイ用のスペーサ自動実装システム及びスペーサ自動実装方法
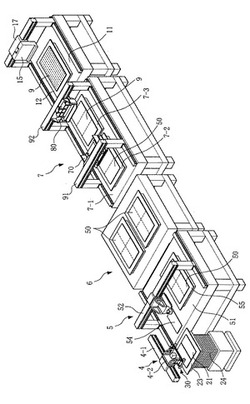
【課題】アスペクト比が大きく且つ多数のスペーサを高速で実装することができる電界放出ディスプレイ用のスペーサ自動実装システムを提供する。
【解決手段】複数個のスペーサを水平整列パレット21に水平方向に整列する水平整列機と、複数個のスペーサを垂直整列パレット50に垂直に整列する反転機を含む垂直整列機5と、垂直整列パレット50と接着剤の塗布されたパネル9とが固定される実装ベースと、垂直整列パレット50に複数個のスペーサを真空吸着する真空吸着機70と、複数個のスペーサをパネル9にガイドするガイド兼加圧機80と、真空吸着機を垂直整列パレット50でパネル9の上側に移動させる第1ローダ91と、ガイド兼加圧機80をパネル9の上側に移動させる第2ローダ92と、垂直整列機5、真空吸着機70、ガイド兼加圧機80、第1ローダ91及び第2ローダ92を制御してパネル9に複数個のスペーサを実装する制御機とを含む。
(もっと読む)
補助作業具

【課題】ロボットバンドを利用して食製品の上部にゴマなどの添え物を載置するなどの補助作業を行う補助作業具を提供する。
【解決手段】食製品5を保持自在なロボットハンド19に装着して補助作業を行うための補助作業具であって、食製品5に対して補助作業を行う補助作業部123Aを一端部に備えた補助作業具本体113の他端部に、ロボットハンド19に備えた複数の保持部材63A〜63Fによって把持される被把持部117を備え、この被把持部117は弾性部材によって構成してあり、前記被把持部117の上面に、ロボットハンド19に備えたエアー噴出口97と接続自在なエアー接続部121を備えている。
(もっと読む)
食品搬送システム
【課題】搬送用ロボットを使用して食製品を搬送する搬送システムを提供する。
【解決手段】食製品製造装置3によって製造された食製品5を搬送する食製品搬送手段7と、前記食製品5をを搬送する別個の搬送手段13と、前記食製品搬送手段7から前記別個の搬送手段13へ食製品を搬送する搬送用のロボット15を備えた食品搬送システムであって、前記ロボット15は、前記食製品5を保持する保持面77を備えた複数の保持部材63A〜63Fを開閉自在に備え、かつ前記各保持部材63A〜63Fの前記保持面77を清掃するための清掃手段を、前記ロボットのロボットハンド19に、又は前記ロボットの周囲の適宜位置に備えている。ロボットハンド19に装着して補助作業を行うための複数の補助作業具103を、前記ロボットハンド19に着脱交換自在に備え、前記ロボットハンド19に対して着脱交換するための複数の補助作業具103A〜103Cを備えた補助作業具交換部を備えている。
(もっと読む)
昇降装置
【課題】搬送通路との干渉を避け、且つワークを安定して昇降させる。
【解決手段】ワークを搬送する搬送通路を挟んで配置される複数の垂直軸と、各垂直軸に個別に対応して設けられ、ワークを支持可能な複数のアームと、各アームに個別に対応して設けられ、対応するアームを垂直軸に沿って昇降させる複数の昇降アクチュエータと、複数の昇降アクチュエータを駆動制御する昇降制御部と、各アームに個別に設けられ、対応するアームを水平面内で揺動させる複数の揺動アクチュエータと、前記複数の揺動アクチュエータを駆動制御する揺動制御部と、を備え、昇降制御部より与えられる指令に基づいて各昇降アクチュエータが駆動され、揺動制御部より与えられる指令に基づいて各揺動アクチュエータが駆動される昇降装置において、アームが、垂直軸に連結されて水平面内を揺動可能な平行リンク部と、平行リンク部に連結されて水平面内を揺動可能な先端部とを有する。
(もっと読む)
異物排除装置
【課題】製造ラインで原材料を検査して異物を排除する際に、異物と共に排除される原材料の量を少なくして無駄を省く。
【解決手段】異物排除装置1は、ベルトコンベア2と、搬送される原材料Mに含まれた異物Fを検出するエックス線源4及びセンサ5を有し、位置情報検出手段6により原材料における異物の2次元の位置情報を取得する。さらにくり抜き手段9が該位置情報を受けて異物の2次元の位置に位置決めされ、下降して原材料に切り込むことにより、異物Fと異物Fの周囲にある原材料Mの一部のみを切断して除去する。
(もっと読む)
移載装置
【課題】電子部品を所定のキャリアに貼着する場合、電子部品とキャリアの粘着シールの間に気泡が生じると、後工程で電子部品の設置高さが異なり接点の位置がずれたり、ワイヤボンディングの際の押圧で電子部品が暴れて不良品の発生が多い原因になっていた。
【解決手段】本発明ではキャリアフレームの升目状枠の下に弾性体を置くことで気泡の発生を防止し、不良品の発生率を激減することが出来る。また、スローリークする導電性のゲル素材を用いることにより、電子部品の回路に影響することなく静電気をアースすることが出来る。
(もっと読む)
ハンドリング装置、制御装置及び制御方法
【課題】コンベアによって搬送されている各ワークを効率のよい順番で処理することができるハンドリング装置、制御装置及び制御方法を得る。
【解決手段】ベルトコンベア2によって搬送されているワーク10を撮像して該ワーク10の位置を示すワークデータを生成する視覚センサ3と、搬送されているワーク10に対して所定の作業を行うロボット4と、視覚センサ3から送信されたワークデータを蓄積してデータベースを作成し、該データベースを用いてロボット4の位置に搬送されたワーク10に所定の作業を行うように該ロボット4を制御するコントローラ5とを備え、コントローラ5がデータベースに格納されている各ワークデータに所定の演算を行って複数のワーク10に対してロボット4が作業を行う順番を並べ替える。
(もっと読む)
サブパレット移載装置
【課題】基準パレット内からサブパレットを簡単に取り出すことができ、また取り出したサブパレットを確実に基準パレット上に移載することができるサブパレット移載装置を提供する。
【解決手段】シリンダユニットを駆動することで、操作爪片107を前進させ基準パレット10に設けたストッパ18をスプリングに抗して水平状態にし、サブパレット20を引き出し可能な状態にする。また予め昇降部材110を最下限位置にし、シリンダユニット123を駆動し、ロッドを前進せしめ、ロッド先端の係合片をサブパレット20のT字溝に進入させ、次いでモータ(駆動部材)によってロッドを90°回動せしめることで係合片をT字溝に係合させ、次いでシリンダユニット123を逆方向に駆動し、収納空間Sからサブパレット20をサブパレット受渡しユニット130上に引き出す。
(もっと読む)
グリッパーヘッド
受け取り領域において第一のフォーメーションで待機している容器群を受け取るため、および受け渡し領域または保管領域で容器群を置くための装置で使用するためのグリッパーヘッド(1)であって、各容器をつかむための複数の捕用らっぱ管(9)を有し、その際、捕用らっぱ管(9)が、容器群内の容器のフォーメーションまたは配置を目的として、グリッパーヘッド枠(2)において互いに直行する少なくとも二つの軸方向(X軸、Y軸)内で、グリッパーヘッド(1)における各容器の軸に対して直角に制御されて可動である。 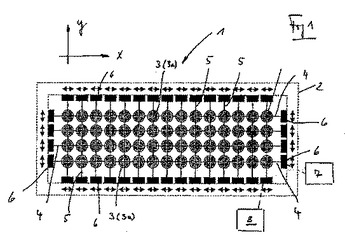 (もっと読む)
(もっと読む)
部材搬送装置
【課題】より少ないスペースで被搬送部材の搬送方向を変換しつつ搬送できる部材搬送装置を得る。
【解決手段】複数のタイヤ14を一括で吊り下げる一括投入用レール38は、キュアスターボールによって、横行方向(矢印A1及び反対方向)と、加硫缶18への投入方向(矢印B1及び反対方向)へ移動可能とされる。一方の移動体32が加硫缶18内にあるときに、これから独立して、他方の移動体32が横行方向へと移動できる。2つの移動体を連結した構成では、移動体を退避させるスペースが必要となるが、本発明ではこのようなスペースが不要なので、より少ないスペースで被搬送部材の搬送方向を変換しつつ搬送できる。
(もっと読む)
2次元移動装置及び搬送装置
【課題】2次元経路で或る機構の固定先を移動可能な2次元移動装置を提供する。
【解決手段】垂直移動ユニット部50の一方の端に配された下板56と、水平移動ユニット部40及び垂直移動ユニット部50の滑動をそれぞれ制動する水平ブレーキ部42及び垂直ブレーキ部47a、47bとを備え、さらに、レールの両端側に、それぞれ駆動プーリ35及び従動プーリ34が軸支され、従動プーリ46及び従動プーリ45が直線経路の中心寄りに軸支され、1本のワイヤ37が、垂直移動ユニット部50の一方の端部近傍から延出され、従動プーリ46、従動プーリ34、駆動プーリ35及び従動プーリ45にこの順で巻き架けられて、垂直移動ユニット部50の他方の端部近傍に接続されており、駆動プーリ35を回転駆動する一方で、水平ブレーキ部42及び垂直ブレーキ部47a、47bを択一的に作動させて、水平移動ユニット部40と垂直移動ユニット部50とを個別に滑動させる。
(もっと読む)
板金加工機の製品仕分け集積システム
【課題】製品の仕分け集積スペースの効率化を図ることができ、例えば、複数のシートにまたがったオーダー物や、次工程の仕分けも同時に行うことのできる板金加工機の製品仕分け集積システムを提供する。
【解決手段】板金加工機の製品仕分け集積システム100は、加工機本体20と、材料棚30と、材料棚30と加工機本体20との間で材料・製品を搬入・搬出可能な搬送装置40とを備えた板金加工機10に適用される。そして、板金加工機の製品仕分け集積システム100は、加工機本体20と材料棚30との間の領域に、加工機本体20から搬出した製品を搬送装置40により集積可能なトレイ110と、トレイ110を収容して次工程へ搬送可能なワゴン130とを備えている。
(もっと読む)
ワーク供給装置
【課題】ワークホルダー内に縦横に配置されたフリーズドライ処理したブロック状のワークを搬送コンベアなどに効率良く自動供給できる新規なワーク供給装置の提供。
【解決手段】ブロック状のワークWが縦横に配置されたワークホルダーH内の各ワークWをそれぞれ保持する複数のワーク保持手段33と、これら複数のワーク保持手段33を前記ワークホルダーHと前記搬送コンベアV間で往復移動させる往復移動手段Bと、前記複数のワーク保持手段33による各ワークWの保持動作と離反動作を前記往復移動手段Bの往復動作に基づいて制御する制御手段Cと、前記往復移動手段Bの往復動作に基づいて前記ワークホルダーHを前記ワーク保持手段33の取り出し位置側に順次移動させるワークホルダー移動手段Aとを備える。これによって、ワークホルダーH内に縦横に配置されたブロック状のワークWを搬送コンベアVなどに効率良く自動供給できる。
(もっと読む)
混合束を形成する方法とその方法を実施する装置
【課題】
個々の品種の任意の部分量及び個々の品種の容器の任意の立体的配列又はそのいずれか一方を備える混合束の編成が混合束内部に可能とされる特に好ましい装置と混合束を編成する方法とを提供すること。
【解決手段】
それぞれに一つの包装体に収容された容器或いは同様な包装ユニットにより品種の同じ束から混合束を形成する方法が提供されていて、品種の同じ束が少なくとも一つの輸送体によって取出し機に供給され、そして各輸送体には特にそのような束が配置されていて、専ら一つの製品を包含し、容器が開放後に少なくとも一つの緩衝区間上に配置されていて、引き続いて混合束に編成され、容器は混合束を形成する異なった品種を複数の作業工程で編成されていて、各活気にみちた緩衝区間では作業工程が行われ、単に緩衝区間の作業工程では容器(1)が取り出されるか、或いは一つの作業工程で編成されていて、混合束を形成する容器が同時に複数の緩衝区間から取り出される。 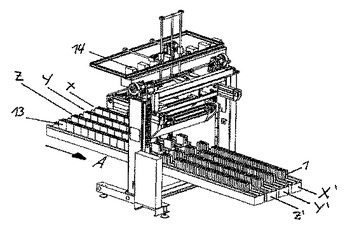 (もっと読む)
(もっと読む)
衝撃吸収機構、及び該機構を備えた機械装置
【課題】 暴走する移動体の衝突による衝撃を短ストローク、低い減速度で吸収して移動体を停止させる衝撃吸収機構を提供する。
【解決手段】 移動体8の移動方向に対して傾斜した平面または曲面からなる凹部の傾斜面を移動体8に向けて開口させたホルダ部1と、前記傾斜面に対応する傾斜面からなる凸部をホルダ部1に対向して配置されたストッパ部2と、ホルダ部1とストッパ部2の両傾斜面の間に挟持される弾性体の緩衝部3とから構成され、ストッパ部2に衝突する移動体8の衝撃力を、緩衝部3の変形により吸収する。ストッパ部2の凸部の先端から延びるリセッタシャフト4と、リセッタシャフト4を貫通させて保持するホルダ部1のホルダ穴5とからなるリセット機構を設けることにより、衝突後にホルダ穴5を通過して延びるリセッタシャフト4の先端を押し戻して衝突前の状態に復帰させることができる。
(もっと読む)
搬送装置
【課題】 搬送装置の汎用性を向上することである。
【解決手段】 ワークWを搬送する搬送装置Tにおいて、ワークWを把持および釈放可能な把持手段Hを備えた伸縮動作可能なアームAと、アームAを水平に往復移動させるとともに移動方向へアームAを遥動させる移動手段Mとを備えたので、ワークWの上方に障害物がある場合にも搬送することが可能となり搬送装置Tの汎用性が向上する。
(もっと読む)
ハンドリング装置、作業装置及びプログラム
【課題】搬送される複数の物品に関する情報を効率的に処理できるハンドリング装置を提供する。
【解決手段】ハンドリング装置1は、ワーク100を搬送するコンベア2と、ベルト12を分割した複数のトラッキング範囲R5の画像を取得してワーク100の位置を検出する視覚センサ3と、ベルト12の移動量を検出するエンコーダ4と、エンコーダ4の検出する移動量に基づいて、複数のトラッキング範囲R5の移動量を監視し、ワーク検出エリアR12を通過中のトラッキング範囲R5を特定するトラッキングマネージャ21bと、トラッキングマネージャ21bにより特定されたトラッキング範囲R5内において物品を選択するワークマネージャ21cと、ワークマネージャ21cにより選択されたワーク100を保持するようにロボット5の動作を制御する制御部21dとを備える。
(もっと読む)
搬送装置及び生産装置
【課題】 生産装置や、搬送装置の変更や、段取り換えを短期で安価に実現する。
【解決手段】 生産装置1は、3つのテーブルユニット4A〜4Cを2つの移載ユニット5A,5Bを介して連結させることで搬送装置を形成しており、各テーブルユニット4A〜4Cの側部には、作業ユニット6が1つずつ連結されている。テーブルユニット4A〜4Cのインデックステーブル3を同期して回転させることで、各作業ユニット6に対応する作業位置14A〜14Lに、ワークの作業治具2が順番に配置されるので、各作業ユニット6が所定の作業を行ったら、インデックステーブル3をさらに回転させる。このようにすることで、ワークの組み立てや、検査を実施する。
(もっと読む)
物品移載装置
【課題】 平坦な側面を有する物品の移載に制限されず、側面に突起体を有する物品の移載を可能とする汎用性の高い物品移載装置の提供にある。
【解決手段】 開閉自在の一対のアーム21、21が機台に対して進退自在に備えられ、物品Wの側面と対向する走行自在の無端帯が前記アーム21、21に備えられ、前記アーム21、21の閉動作により無端帯を介して物品Wを挟持するとともに、前記無端帯の走行により前記物品Wを前記アーム21に沿って進退自在とする物品移載装置であって、前記無端帯には前記物品Wと対向する凸部と凹部37が含まれ、少なくとも前記凸部には前記物品Wと当接する当接面36aが形成されている。
(もっと読む)
搬送装置
【課題】 短時間で安定した搬送を行なうことが可能な搬送装置を提供すること。
【解決手段】 無端状体をループ状に回転させることにより被搬送物を搬送する無端状体手段と、上記無端状体手段の無端状体に所定ピッチで設けられ上記被搬送物を無端状体から浮上させた状態で無端状体上に載置させる被搬送物浮上用凸部と、上記無端状体手段に対して離間・配置され上記複数個の被搬送物浮上用凸部の間に保持爪体を差し込んで被搬送物を保持して任意の場所に搬送する被搬送物搬送ユニットと、を具備したもの。
(もっと読む)
1 - 20 / 20
[ Back to top ]