
Fターム[3F079CA23]の内容
物品の選別 (7,206) | 選別(検知、検査、測定対象) (1,629) | 被選別物の状態、特性 (1,322) | 形状 (115)
Fターム[3F079CA23]の下位に属するFターム
曲り具合 (6)
Fターム[3F079CA23]に分類される特許
1 - 20 / 109
物品仕分装置
莢果選別装置
【課題】莢果を適切に搬送する。
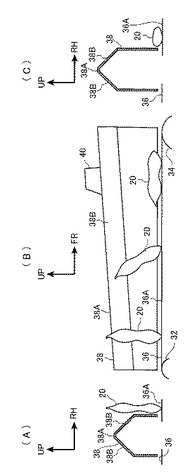
【解決手段】莢果選別装置10では、コンベヤベルト36の移動部36Aに莢果20が落下されて供給されると共に、コンベヤベルト36が回動されて移動部36Aが前側に移動されることで、莢果20が前側に搬送される。ここで、移動部36Aの側方の仕切枠38では、傾斜部38Bが前方へ向かうに従い上方へ向かう方向に傾斜されている。このため、仮に、移動部36Aに供給された莢果20が傾斜部38Bに引っ掛かることで起立姿勢にされても、移動部36Aの移動により莢果20が前側に搬送されることで、傾斜部38Bが莢果20から離間されて、莢果20の傾斜部38Bへの引っ掛かりが解除される。これにより、莢果20が転倒されることで、莢果20を移動部36A上に寝姿勢で載置できるため、莢果20を適切に前側に搬送できる。
(もっと読む)
莢果選別装置

【課題】莢果が搬送方向において重なることを抑制する。
【解決手段】莢果選別装置10では、整列部12が振動されて、莢果20が供給台18上、第1整列台22上及び第2整列台24上をこの順で前側に搬送される。さらに、コンベヤ部28が莢果20を前側に搬送して、第1センサ部42及び第2センサ部48が莢果20を測定することで、エジェクタ56が莢果20を選別する。ここで、整列部12では、第1整列台22(第1収容部22A)と第2整列台24(第2収容部24A)との間の段差26によって莢果20が落下される。このため、仮に第1整列台22上で莢果20が前後方向において重なっている場合でも、莢果20が第1整列台22上から第2整列台24上に落下されて、莢果20に落下の衝撃が作用されることで、第2整列台24上で莢果20が前後方向において重なることを抑制できる。
(もっと読む)
紙葉類処理装置、及び紙葉類処理装置の制御方法
【課題】より安定して紙葉類を集積することができる紙葉類処理装置、及び紙葉類処理装置の制御方法を提供する。
【解決手段】一実施形態に係る紙葉類処理装置は、紙葉類を搬送する搬送手段と、前記紙葉類の種別を判定する種別判定手段と、前記紙葉類を集積する区分ポケットと、前記搬送手段により搬送されている前記紙葉類を前記区分ポケットに取り込む取込手段と、前記取込手段を動作させる駆動手段と、前記種別に基づいて駆動パターンを決定し、決定した前記駆動パターンを用いて前記駆動手段を駆動させる駆動制御手段と、を具備する。
(もっと読む)
物品仕分装置
【課題】物品仕分装置1において、形状や重心高さの関係等で座りの悪い物品であっても、搬送中の転倒及び落下を確実に防止できるようにする。
【解決手段】本願発明の物品仕分装置1は、物品Mを載置する多数の搬送ユニット3を列状に並べて搬送する搬送ライン2と、搬送ライン2中の仕分け箇所Soから搬送ライン2の搬送方向Xと交差する仕分け方向Yに分岐した仕分けライン4とを備える。各搬送ユニット3は、仕分け箇所Soに到達したときに仕分けライン4に向けて物品Mを送り出す仕分け機構10を有する。仕分けライン4には、仕分け箇所Soから送り込まれた物品Mに付与される搬送方向Xへの移動力Fxを吸収する移動力吸収部材43を有する。
(もっと読む)
大塊搬送物検知システム
【課題】大塊搬送物を好適に検知することが可能な大塊搬送物検知システムを提供する。
【解決手段】大塊ずり検知システム1は、ずり2を搬送するベルト12を有するベルトコンベア10と、ベルト12上のずり2に光を照射する照明部30と、光が照射されたずりを時間を空けて複数回撮影する撮影部40と、ずりに一方から光が照射された時刻t1に撮影された第一の画像とベルト12の走行によってずりに他方から光が照射された時刻t2(>t1)に撮影された第二の画像とに基づいて、大塊ずりを検知する大塊ずり検知部53bと、を備え、大塊ずり検知部53bは、ベルト12の速度をvとしたとき、v・(t2−t1)に基づいて第一の画像及び第二の画像の位置合わせを行って第一の画像及び第二の画像の論理積画像を生成し、論理積画像から大塊ずりを検知する。
(もっと読む)
物品仕分装置
【課題】物品仕分装置1において、搬送ライン2と仕分けライン4との両方で長物物品Mを密に載置して、効率よく搬送し仕分けできるようにする。
【解決手段】本願発明の物品仕分装置1は、長物物品Mが載置される多数の搬送ユニット3を列状に並べて搬送する搬送ライン2と、前記搬送ライン2からその搬送方向Xと直交する仕分け方向Yに分岐した仕分けライン4とを備え、前記仕分けライン4に向けて前記各搬送ユニット3上の前記長物物品Mを送り出すものである。前記各搬送ユニット3上の前記長物物品Mは前記仕分け方向Yに沿った姿勢で載置される。前記搬送ライン2による前記搬送方向Xの送り力Fxと、前記各搬送ユニット3による前記仕分け方向Yの送り力Fyとの組合せF(x+y)によって、前記仕分けライン4に受け渡された前記長物物品Mの姿勢を前記仕分け方向Yと交差する姿勢にする。
(もっと読む)
選果システム
【課題】青果システムにおいて、載置台の搬送方向に対する配置方向を所望の方向に揃える。
【解決手段】青果物が載置される概ね円柱形状の載置台5をコンベア10上に載せて搬送方向に搬送する選果システムにおいて、載置台5の外周面に当該載置台5の軸線に対して偏芯した円形状に形成される偏芯切欠部5pと、コンベア10の上方において搬送方向と平行に延出するように配置され、載置台5の外周面に当接する第一ガイド110と、コンベア10の上方において第一ガイド110と対向し、搬送方向下流側で当該第一ガイド110に徐々に接近するように配置され、載置台5の偏芯切欠部5pに嵌合される第二ガイド120と、を具備した。
(もっと読む)
選果システム
【課題】青果物の乱形果を原因とする移送不良や箱詰不良を防止することができる選果システムの提供を目的とする。
【解決手段】青果物6を載置する載置台5を搬送する搬送部10は、青果物載置部30から品質計測部40、移送部50、箱詰部70と順に載置台5を搬送する主搬送装置11を備え、前記品質計測部40の下流側には、前記載置台5に載置された青果物6が品質計測部40において移送部50の移送装置60で移送できない乱形果を、トレイ8に手詰めする手詰部42に移送する手詰ライン15が設けられる。
(もっと読む)
選果システム
【課題】選果システムをコンパクトに構成することを課題とする。
【解決手段】載置台5に載置される青果物6を等級および階級毎にトレイ8に詰める選果システム1であって、青果物6の内部品質に関する情報に基づいて青果物6の等級および階級を判断するとともに、前記判断した等級および階級から青果物6の移送先となるトレイ8を決定する制御装置と、青果物6の内部品質を計測する内部品質計測手段を有し、載置台5に載置される青果物6を決定された移送先のトレイ8へ移送する移送部と、を備える。
(もっと読む)
果菜物仕分設備
【課題】 収穫した果菜物をトレイに載せて搬送しながら選別仕分けして、箱詰処理する等の作業形態は、比較的小規模であることが多く、トレイコンベアの設置床面積も狭く制限され易い。
【解決手段】 トレイTを載せて直進状の往行程Aから復行程Bへ折返し循環搬送するトレイコンベア1の仕分行程Eの外側に、前記仕分装置3によって仕分けられたトレイTを受け継いで搬送しながら、このトレイTの果菜物Wを取出処理する各取出コンベア4を前記直進状の各仕分行程Eの外側に沿って平行状に形成する果菜物仕分設備の構成とする。
(もっと読む)
対象物を検査・選別するための装置および方法
【課題】 対象物を検査選別するための効率的な装置および方法を提供すること
【解決手段】 対象物を受け入れるが、対象物が互いに積み重なるのを防止するようになされた略水平な空間と、複数のトンネルと、対象物が前記複数のトンネルに入るようにさせるガス圧力を伝達するように構成された複数のガス開口部とを含む装置を提供する。
(もっと読む)
選果システム
【課題】移送装置による載置台に載置された青果物をトレイに移送する際の動作を高速でおこなうことができるものを安価に実現する。
【解決手段】載置台搬送装置51によって搬送される載置台5に載置される青果物6を、トレイ搬送装置53によって搬送されるトレイ8へ移送する移送装置を備え、載置台5に載置される青果物6を等級や階級毎に前記トレイ8に詰める、選果システムであって、載置台搬送装置51およびトレイ搬送装置53は、載置台5に載置される青果物6のがく片6bとトレイ8の収納部8aにおけるがく片収納位置8bとが同一方向を向くとともに、青果物6の主軸Xとトレイ8の収納軸Zとが平面視で平行するように、載置台5およびトレイ8を搬送する。
(もっと読む)
廃棄物の選別システム
【課題】フラットパネルディスプレイを含む廃棄物を効率良く選別できる選別システムを提供すること
【解決手段】フラットパネルディスプレイを含む廃棄物80を選別する選別システム100であり、廃棄物80を搬送するコンベア50と、撮像素子10と、選別処理装置20と、廃棄物80を取り出すロボットアーム部60とを備える。選別処理装置20は、フラットパネルディスプレイを構成する部材(82、84、86)の外郭を含む形状データを記憶する形状データ記憶部と、撮像素子10が撮像した廃棄物80の画像データを処理する画像データ処理部と、形状データ記憶部の形状データと、画像データ処理部の画像データとを対比する対比処理部と、対比処理部での対比結果に基づいて、ロボットアーム部60を操作する操作部とを含んでいる。
(もっと読む)
容器の判別方法
【課題】画像処理によって廃棄物中に混在しているペットボトルを確実に判別可能とすることを課題とする。
【解決手段】被判別対象の撮影工程と、被判別対象の二値化画像を作成する二値化工程と、前記二値化画像から前記容器の口部分の形状を抽出する口部分形状抽出工程と、前記二値化画像の容器の口部分を含む画像部分を、容器を輪切りするように帯状に複数の区域に区分けする区域分け工程と、前記区域毎に容器に該当する領域の横幅をそれぞれ計測する横幅計測工程と、前記区域毎に、各区域において同一の方向に隣接する区域との前記横幅の差又は比率を求め、求めた値を判別値とする判別値演算工程と、前記判別値と事前に設定した閾値とを比較する形状判断工程とからなり、該形状判断工程での比較の結果に基づいて前記容器がペットボトルであるか否かを判別する、という技術的手段を講じた。
(もっと読む)
ボルト識別方法およびボルト識別装置ならびに識別ボルト
【課題】自動化されたボルト締結工程においても確実にボルトの識別ができるボルト識別装置を提供する。
【解決手段】ボルト7の頭部7a上面に形成された上方が開口した工具挿入凹部71の開口を密閉するパッド8と、パッド8により密閉された工具挿入凹部71内にエアーを供給するエアー供給手段と、工具挿入凹部71内のエアー圧を測定する測定手段と、エアー圧に基づいてボルト7の仕様を識別する識別手段とを備えて構成する。
(もっと読む)
容器の判別方法
【課題】画像処理によって廃棄物中に混在しているペットボトルを確実に判別可能とする方法を提供する。
【解決手段】選別対象の容器を撮影する撮影工程S1と、前記撮影工程で撮影して得られた画像情報から二値化画像を作成する二値化工程S2と、前記二値化画像から前記容器の口部分の形状を抽出する口部分形状抽出工程S3と、前記口部分形状抽出工程で前記形状が抽出された二値化画像から容器の首部及び口部の幅を計測する工程S4・S5と、前記工程で計測された首部の幅及び口部の幅の計測値を演算し、演算して求めた演算値と事前に設定した閾値とを比較する形状判断工程S6とからなり、前記形状判断工程での前記比較結果に基づいて前記容器が判別対象の容器であるか否かを判断する。
(もっと読む)
ビン検査装置、並びにビン入り飲食品の製造方法及びビン入り飲食品
【課題】検査対象のビンの中に、正常品のビン(充填時に設定した形状のビン)とは異なるビン(異種ビン:設定外の形状のビン)が含まれているときに、異種ビンが存在することを簡単に検知することに適したビン検査装置を提供する。
【解決手段】立設されているビンに対して上側から装着される検査ヘッドと、予め定められている鉛直方向の異なる位置に設置されていて、前記ビンに対して上側から装着されている状態の前記検査ヘッドの方向に向けて、それぞれ水平方向に検査光を発射する複数個の光電センサとを備えており、前記複数個の光電センサから鉛直方向の異なる位置で、水平方向に発射される複数本の検査光が前記検査ヘッドの上端側で遮光されるか否かを利用して、前記検査ヘッドが装着されたビンが正常品のビンであるか否かを把握するビン検査装置。
(もっと読む)
物体の複数の側面を撮像するシステムおよび方法
【課題】物体を検査する効率的なシステムおよび方法を提供する必要性が増大している。
【解決手段】物体の複数の画像を獲得するシステムであって、システムは、4つの長手方向移送器と、3つの回転モジュールと、撮像装置とを含む。4つの長手方向移送器は、物体が内部を通って4つの撮像領域に伝播する複数のトンネルを備え、4つの長手方向移送器は、トンネルを通して電気回路を搬送するために、ガス圧の差を利用し、少なくとも1つの長手方向移送器は、ある位置に設置されると、少なくとも1つのトンネルの少なくとも実質的部分を露出する可動部分を有する。3つの回転モジュールは、各回転が2つの長手方向移送器の間に位置するよう、物体の長手方向軸を中心に物体を回転させるように構成される。撮像装置は、4つの撮像領域のそれぞれにおいて、物体の画像を取得するように構成される。
(もっと読む)
対象物の複数の側面を画像化するための装置および方法
【課題】電気的対象物を検査するための装置および方法において、対象物、装置を損傷させることのない装置および方法を提供する。
【解決手段】対象物の複数の画像を獲得するための装置は、横方向画像化領域510,520,530,540に対象物を横方向で移送するようになされた複数の横移送機部分を含む横移送機110,120,130,140であって、各横移送機部分は、対象物レシーバおよび移送要素を含み、移送要素は、所定の抵抗を超えた抵抗を受けない限り、対象物レシーバを画像化領域510,520,530,540に向けて移動させる、横移送機110,120,130,140と、対象物が横方向画像化領域510,520,530,540に配置されたとき、対象物の2つの逆向きの側面の画像を得るように構成された撮像装置30とを含む。
(もっと読む)
1 - 20 / 109
[ Back to top ]