
Fターム[3F080CG02]の内容
物品のコンベア等への供給 (6,969) | その他の装置 (239) | 物品取出部材(ピックアップアーム) (61) | 把持式アーム (13)
Fターム[3F080CG02]に分類される特許
1 - 13 / 13
物品供給方法およびその装置
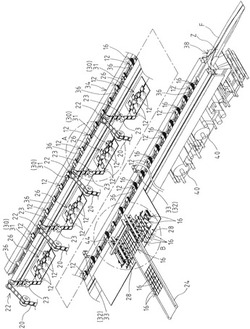
【課題】複数品種の袋体を詰め合わせる。
【解決手段】第1袋体10が所定数連なった第1連包体12と、第1袋体10と異なる品種の物品が包装された第2袋体14が所定数連なった第2連包体16とを夫々形成する。各連包体12,16を、袋体10,14が重なるように折り重ね手段26,28で折り重ねる。折り重ね手段26,28から移送手段30,32で移送された連包体12,16を集合させて、供給コンベヤ34によって横形製袋充填機の充填位置Zへ向けて移送する。
(もっと読む)
物品搬送方法及び物品搬送装置

【課題】物品や容器のサイズ或いは容器内への物品の詰め合わせ状態などに応じた複数の物品の供給形態に対応可能な物品搬送方法及び物品搬送装置を提供する。
【解決手段】所定間隔毎に搬送される物品搬送コンベヤ2上の複数の物品1を吸着手段で吸着し、所定間隔毎に搬送される容器搬送コンベヤ4の第一コンベヤ5上の容器3に各物品1を載置して該容器3と共に搬送する際に、指定手段により第一の制御プログラムに切り替えられた状態では複数の物品1の夫々に対応した位置に配備された吸着具が各物品1を夫々吸着してまとめて容器3の一つに載置し、また、指定手段により第二の制御プログラムに切り替えられた状態では物品1を夫々吸着している吸着具の間隔を容器搬送コンベヤ4の第一コンベヤ5上の複数の容器3の間隔に合わせて該複数の容器3に夫々の物品を載置する。
(もっと読む)
搬送装置、チャック並びに搬送方法
【課題】整列配置の精度が高い、搬送装置、搬送装置に用いられるチャック、並びに搬送方法を提供する。
【解決手段】搬送装置1は、整列搬送機1Aと、チャック1Bとを備える。チャック1Bは、整列搬送機1Aから搬出される処理済みのタコ25が載せられるベルトコンベア19の上方に位置する。長手方向スライド部材29に沿ってスライド可能な横方向スライド部材30が、長手方向スライド部材29に取付けられており、横方向スライド部材30にチャック1Bが取付けられている。長手方向スライド部材29や横方向スライド部材30によってチャック1Bが、撮影画像で把握されたタコ25の位置に移動する。チャック1Bは、閉じた場合に先端がチャック1Bの中心軸線上に位置するよう湾曲した3本の把持爪31を有しており、タコ25の位置に移動してきたチャック1Bは、この把持爪31を閉じてタコ25を把持する。
(もっと読む)
物品移載装置
【解決手段】 物品1は4個の略三角形の面を備えた四面体形状を有し、その一端部分の形状と他端部分の形状とが異なっている。物品搬送手段4は上記物品の載置方向が搬送方向に対して一定の角度を向くように上記物品を搬送するようになっている。
移載手段6は、物品の一端部分の形状に適合して該一端部分を保持する第1保持手段52と、該第1保持手段に対して上記物品の載置方向と同じ方向に整列するとともに、該第1保持手段を挟むように設けた、物品の他端部分の形状に適合して該他端部分を保持する2つの第2保持手段53と、上記第1、第2保持手段を上記物品の載置方向に往復動させる切替手段54とを備えている。
【効果】 両端部の形状が異なる物品であってもこれを保持することができ、上記移載手段の構成ならびに制御を容易とすることができる。
(もっと読む)
物品集積供給装置
【課題】集積した物品4を安定した状態で受け渡しを行うとともに、これら物品4を下流側に受け渡している間に。次の物品4の集積を可能にして高速化を図る。
【解決手段】開閉可能な一対の載置部材22A、22Bおよび載置部材22A、22Bを昇降させる昇降手段26を有する載置手段6と、載置手段6に物品4を移載するロボット8と、載置手段6の下方に配置され、開閉可能な一対の当接部材30A、30Bを有する受渡手段10と、受渡手段10上の物品4を押し出して下流側のバケットコンベヤ14に供給するプッシャ12とを備えており、載置部材と当接部材は櫛歯状で互いの隙間を通過可能な位置に配置されているに。物品が移載された載置部材を下降させ、移載手段に引き渡して外方へ拡開するとともに、当接部材を接近させて物品に当接させ安定した状態にしてプッシャで物品を押し出す。
(もっと読む)
ドラムフィーダ
【課題】エーゼのような細長い棒状の部材を堆積した状態で収納したドラムから、その部材を効率的かつ確実に1本ずつ取り出すことができるドラムフィーダを提供すること。
【解決手段】外周に2以上の開口部3を持つ回転自在なドラム1と、ドラム1の外周面と対面する湾曲面を持つ部材ガイド5とを備え、ドラム1内に棒状の部材4を収納するドラムフィーダであって、開口部3のドラム回転方向後方側に、部材受け面と部材フィード面とを備えた部材収容部6を設け、前記部材受け面はドラム外側を向いてドラム回転方向へ突き出し、かつ前記部材フィード面と交わる位置から0〜15度の角度でドラム内側へ向かい、そのドラム回転方向の長さは部材4の長幅に対し0.7〜1.5倍とし、前記部材フィード面はドラム回転方向を向き、前記部材受け面と交わる位置が前記湾曲面からドラム半径方向へ部材4の短幅に対し1〜1.5倍となるように設けたドラムフィーダ。
(もっと読む)
箱の解体装置付き棒状物品の供給機
【課題】小形化且つ設置スペースの削減を図ることができる箱の解体装置付き棒状物品の供給機を提供する。
【解決手段】箱の解体装置付き棒状物品の供給機は、棒状物品としてのフィルタロッドを収納した箱(B)をコンベアセクション(10)からロッドホッパ(30)近傍のベルトコンベアまで搬送し、このベルトコンベア上に箱(B)内のフィルタロッドを載置して箱(B)を空箱(B’)とする搬送供給装置(2)と、搬送供給装置(2)から受け取った空箱(B’)を解体装置(6)まで移送する移送装置(4)とを備え、解体装置(6)はその一部が搬送供給装置(2)のコンベアセクション(10)の下方に重なり合うようにして配置されている。
(もっと読む)
極細線材の分離供給装置
【課題】1本の線材のみを把持できるチャックの爪部開閉のためのシリンダ装置等を不要として該チャックを安価なものとすると共に構造の簡素化を図る。
【解決手段】線材掴み装置のチャック50bは基板50hに回動支持された一対の爪部50cからなり、これら爪部50cが互いに僅かな間隙D0をもって対向し重力の作用下で自重により垂下している。爪部50cの互いに対向する内側にはテーパ状の挟み部50dが形成されており、ストッカ部内の数本の線材wに対してチャック50bが押し込まれて該チャック50bの爪部50cが前記間隙D0により許容される範囲において開き、そのテーパ状の挟み部50dの一番奥に入り込んだ1本の線材w1を該挟み部50dにより把持し、チャックが上昇する途中位置に掴み上げられた極細線材に係合可能な邪魔部材52を配置した。
(もっと読む)
瓶整列装置及び瓶自動収納方法
【課題】瓶の収納ケースへの収納を効率良く行なう。
【解決手段】支持台7上に設けた2つの瓶取出位置7a,7bの間に1列の瓶1を搬入する搬入コンベア8と、搬入された1列のの瓶1を係止する係止部材10と、各瓶取出位置7a,7bにおいて搬入コンベア8と直角方向に配設された複数の固定ガイド14a,14bと、固定ガイド14a,14bと直角方向に配設され、各瓶取出位置7a,7bにおいて固定ガイド14a,14bと平行な方向に移動可能な複数のスライドガイド15とから瓶整列装置を構成し、スライドガイド15の押圧移動により複数列の瓶1をスライドガイド15と固定ガイド14a,14bとにより各瓶取出位置7a,7bに交互に整列させ、整列された複数の瓶1を敏把持装置により一括把持し、一括移動し、収納ケース20に一括収納する。
(もっと読む)
棒状をした食品の搬送装置
【課題】 棒状をした食品を同じ向きに揃えて、しかも同一の間隔を空けて搬送することにより、破損を可及的に減少させかつ正確に計数できるようにする。
【解決手段】 棒状の食品1を多数、向きと位置を揃えて収容しているホッパ6と、このホッパから棒状の食品1を掬い上げて所定間隔で別の位置に供給する無端コンベヤ8からなり、ホッパには起振装置7を設けて食品が確実に無端コンベヤに掬われる搬送装置とした。搬送装置は、左右の無端チェン82の間にこれらチェンの連続方向に等間隔に掛け渡されて前後間に棒状の食品1を収容する空間を形成する多数のクロスバー83と、その下面で食品を下から支えるガイドレール84と、を備え、クロスバー83の間隔と径は棒状の食品が前後のクロスバーの間に1本だけ入る寸法としている。
(もっと読む)
薄肉部品積層体の自動組立装置および薄肉部品を備えた荷姿構造
【課題】薄肉部品を支持部材に積層するタイプの組立の際に作業を自動化することができ、人力に頼っていた薄肉部品の組み立て作業における省力化をなし得た装置を提供する。
【解決手段】複数の支持部材を備えたパレット16を支持する供給ローダー2と、それに近接配置された本体ベース1と、本体ベース1上の搬送路23と、該搬送路23に沿って移動自在に設けられた搬送治具と、供給ローダー2上のパレット16から整列配置された支持部材を個別に取り出して搬送路23の治具に供給する第1の搬送機構と、搬送路の近傍に複数整列配置されて搬送路の移動途中において支持部材に個々に薄肉部品を積層する組み付けユニット8とを具備してなる。
(もっと読む)
搬送装置及びそれを備えた箱詰め装置
【課題】 受入位置で比較的偏平な物品を起立姿勢で受け入れ、所定個数に達した物品を集積状態で排出位置に搬送する場合に、少ない駆動手段で物品の受け入れを高速化することができる搬送装置及びそれを備えた箱詰め装置を提供する。
【解決手段】 起立姿勢の物品を集合状態で移送するバケット220の移送経路の上方かつ移送経路を挟んで両側に、後端保持部材駆動機構241,241を備える。各後端保持部材駆動機構241に、所定の経路を循環走行する一対のエンドレスチェーン254,254を配設し、該エンドレスチェーン254,254に、ほぼ等間隔かつ垂直姿勢となるように一対の後端保持部材248,248を連結する。そして、片側一対の後端保持部材248,248を単一のモータ249で移動させる。
(もっと読む)
転回ユニット
【課題】 ワーク転回(反転を含む)のための機構が簡単で、かつ、転回作動を高速化できる転回ユニットの提供。
【解決手段】 ワーク収容部材24と第1、第2の蓋部材23a,23bを有するヘッド3と、ヘッド3を正転位置、反転位置とする間欠駆動機構モーター4及びヘッド3の第1、第2の蓋部材を前後にスライド移動させ、ワーク収容部材24に設けたワーク配置孔26を開閉するスライド駆動モーター5を有し、ヘッド3が正転位置にあるとき第1蓋部材23aを開閉し、ヘッド3が反転位置にあるとき第2蓋部材23bを開閉するとともに、ヘッド3が反転するとき第1、第2の蓋部材23a,23bをともにワーク配置孔26を閉じた位置とするワーク転回ユニット1。
(もっと読む)
1 - 13 / 13
[ Back to top ]