
Fターム[3F081BC01]の内容
コンベア上の物品の姿勢制御 (7,432) | 整列 (531) | 物品を適正な姿勢、方向に修正するもの (359)
Fターム[3F081BC01]の下位に属するFターム
表裏面を一定の面にして送り出すもの (35)
複数列物品の前後端部を揃えるもの (25)
所定の搬送ラインに揃えるもの (96)
Fターム[3F081BC01]に分類される特許
1 - 20 / 203
物品仕分装置
物品整列装置
【課題】異なる形状の端部を有する物品を効率よく箱詰めすることを可能にする物品整列装置。
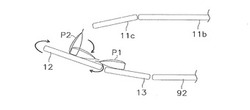
【解決手段】袋P2は、傾斜搬送部11cから停止中の第2の搬送装置12に落下する。袋P2の落下が、落下検知センサによって検知されると、第2の駆動部は制御される(第1の処理)。第2の駆動部は、袋P2が第2の搬送装置12のベルトコンベアに落下した後、第2の搬送装置12を駆動させる。このとき、袋P2は、上端を下流側に倒す。袋P2は、上端が下流側、下端が上流側に位置するように倒れる。これにより、袋P2は、第2の搬送装置12によって第2の平面状態で搬送される。第2の駆動部のモータの回転数が所定値に達すると、袋P2は、第3の搬送装置13に受け渡される。
(もっと読む)
物品整列搬送装置

【課題】 各種形状、サイズの物品を進行方向と平行な一定のコンベヤ軸上に揃えて搬送し、次工程への移載を安定的に行なったり、移載時に特定の姿勢に整列可能にすること。
【解決手段】 2つのコンベヤ20、30をそれらの進行方向が互いに平行になるように並べた整列コンベヤ装置10を有してなる物品整列搬送装置100であって、整列コンベヤ装置10が、2つのコンベヤ20、30の搬送面21、31の延長線がそれらの進行方向に直交する一の面内でV字をなすものにし、それらの両搬送面21、31がなす角の二等分線10Bを鉛直方向に対して傾けてなるとともに、2つのコンベヤ20、30の搬送面21、31の延長線がそれらの搬送面21、31内では交差しないもの。
(もっと読む)
物品搬送装置
【課題】任意の間隔や向きで搬送されてきた物品を高速に搬送する。
【解決手段】物品認識手段により得た物品10の位置に関する情報に基づき、物品10を吸着する順序を定めて回転体20の回転中にアーム32を該情報に応じた回動角度で回動させて物品10を吸着具34で吸着する。物品10の向きに関する情報に基づき、物品10が載置位置Xにおいて特定の方向に向くように吸着具34を回転させて、物品10を載置位置Xを載置する。
(もっと読む)
物品搬送装置
【課題】任意の間隔で搬送されてきた物品を高速で搬送する。
【解決手段】物品認識手段により得た情報に基づき、回転体20の回転中にアーム32を回動させて吸着予定の物品10に対向する吸着位置Uにおいて該物品10を吸着具34で吸着するに際して、上昇位置と下降位置との間の中途範囲において吸着予定の物品10)の斜め上方から前記吸着位置Uを含む下降位置付近に向けて該吸着具34を吸引しながら下降させ、該下降位置付近にて中途範囲よりも吸着具34を遅く下降させるようにアーム昇降モータを変速制御して、物品10を吸着する。
(もっと読む)
基板処理装置
【課題】 端縁に段差を有する基板を処理する場合であっても、端縁を十分清浄に洗浄処理し、乾燥させることが可能な基板処理装置を提供する。
【解決手段】 電子ペーパ製造用基板10は、最初にレジストの剥離処理がなされる。次に、電子ペーパ製造用基板10は、洗浄液噴出ノズル51からその長辺S1に洗浄液が噴出され、その長辺S1を洗浄処理されるとともに、表面および裏面に洗浄液を供給されて洗浄処理され、さらに、洗浄液噴出ノズル52からその短辺S2に洗浄液が噴出され、その短辺S2を洗浄処理される。そして、電子ペーパ製造用基板10はエアナイフ80によりその両面の洗浄液を除去された後、ヒータ部90によりその長辺S1および短辺S2を乾燥処理される。
(もっと読む)
厚鋼板剪断により生じたスクラップの搬送方法及び搬送装置
【課題】クロップシャーで切り落とされたスクラップが、搬送ローラテーブル上を板エッジ部を下にした起立姿勢で搬送されてきた際に、簡単にスクラップの姿勢を適正状態に直すことができる搬送方法を提供する。
【解決手段】厚鋼板の剪断で生じたスクラップを細断用のテストシャーに搬送するための方法であって、テストシャー上流側の搬送ローラテーブル上を、反りを生じたスクラップが板エッジ部を下にした起立姿勢で搬送されてきた際に、搬送ローラテーブルの駆動を停止し、静止した状態のスクラップに対して、搬送ローラテーブルを構成するローラ間の位置において下方からリフターを上昇させ、該リフターでスクラップを持ち上げて、スクラップとリフターとの接触部を支点にスクラップを転倒させ、スクラップを反りの内側となる面が下になる姿勢とする。
(もっと読む)
キャップ姿勢制御方法およびキャップ姿勢制御機構並びにキャップ姿勢制御装置
【課題】天面を下方に位置させた仰向け姿勢とされたキャップと、天面を上方に位置させた伏せ置き姿勢とされたキャップとが混在して搬送される搬送路において、簡単な構成で確実にキャップを全て一律に仰向け姿勢とすることができるキャップ姿勢制御方法、機構、装置を提供する。
【解決手段】キャップの搬送路10に形成された溝部14を備える反転部13において、該反転部13へ仰向け姿勢で搬送されているキャップは該キャップを搬送する搬送力によりそのまま前記溝部14上を通過させて下流側へ送り、伏せ置き姿勢で搬送されているキャップは該キャップに働く自重により前記溝部14へ搬送方向先端から落下させて前傾させたあと、前記搬送力に基づく慣性力および/または反転のために該キャップに加える外力により、その前傾動作に連続させて、搬送方向下流側へ前転させ、仰向け姿勢に制御して下流側へ送る。
(もっと読む)
作物選別装置
【課題】
貯留部に投入される作物の量や大小に合わせて、整列搬送装置から貯留部に戻される作物の量を変更可能に構成し、作物選別装置の処理効率を向上させる。
【解決手段】
貯留部Aから整列搬送部Cを通って整列された作物を選別搬送部Eに送って等級毎に選別する作物選別装置で、第1整列搬送コンベア37に続けて設ける第2整列搬送コンベア48上で一列に整列しない作物を搬送外へ取り出す選外取出口26を設け、該選外取出口26から取出した作物をフィードバック手段54で貯留部Aに戻すようにした整列搬送部Cにおいて、選外取出口26の開口度を変更調整可能にしたことを特徴とする作物選別装置とした。
(もっと読む)
フロア搬送装置における搬送物の姿勢を維持しつつ搬送方向を変換する機構
【課題】 搬送物の姿勢を維持しつつ搬送方向を変換させることによって、搬送物の向きを自在に調整できるとともに、省スペース化および省エネルギ化に資する搬送方向変換機構を提供する。
【解決手段】 走行体1は、本体部11の上部に立設された支柱用基軸14を備える。搬送物用支柱2は、支柱用基軸を延長するように、かつ、支柱用基軸の軸回りに回動自在に接続された支柱本体21と、この支柱本体から径方向に突出する位置に配置された二種類のガイドローラ群3,4とを備える。搬送レールLによる搬送経路の向きを変化させる範囲には、搬送レールに平行な状態で設けられ、かつ、上記二種類のガイドローラ群を個別に案内する二種類のガイドレールGL1,GL2を設ける。
(もっと読む)
搬送装置
【課題】被搬送物の姿勢を変更するための物体とガイドとの隙間に、被搬送物の包材が嵌まり込まないようにした搬送装置を提供する。
【解決手段】搬送装置100では、制御部190は、包装物Bが突出状態の突出体121と当接して回転する際、突出体121を包装物Bの搬送方向と交差する方向に水平に移動させるので、包装物Bのコーナーが突出体121とガイド部材110との隙間に嵌り込むことが防止される。その結果、包装物Bが回転できないという事態が回避される。特に、軟包装商品はコーナーが突出体121とガイド部材110との隙間に嵌り込み易いので、その効果は格別である。
(もっと読む)
搬送位置決め装置、トレー、及びトレーの支持構造
【課題】物品を搬送する速度を高くするのに有利であり、しかも複数のトレーの姿勢を迅速に揃えることのできる搬送位置決め装置、トレー、及びトレーの支持構造を提供する。
【解決手段】搬送位置決め装置5は、第1搬送手段15の第1支持部材13と第2搬送手段19の第2支持部材17とがトレー1の下面を支持し、第1支持部材13と第2支持部材17との動作する速度の差に基づきトレー1を矢印αの向きに回動させる。第3搬送手段23の第3支持部材21の動作する速度[V3]は、第1搬送手段15の第1支持部材13と第2搬送手段19の第2支持部材17との動作する速度[V1,V2]の平均速度である。
(もっと読む)
容器集合装置
【課題】搬入コンベヤと搬出コンベヤの間で、並置した複数列コンベヤとそれを横断して容器を接触摺動させる容器ガイドによって、容器を複数列から単列化集合する容器集合装置において、スペース効率がよく、効率よく単列化集合できる容器集合装置。
【解決手段】搬入コンベヤ5側から搬出コンベヤ6側へ順次速度差を有する複数列のカーブコンベヤ1a、1b、1c、1dを搬入コンベヤ5と搬出コンベヤ6との間に隣接して並設し、複数列のカーブコンベヤにカーブ部の接線方向と適宜の角度をなして複数列のカーブコンベヤをほぼ横切って容器Pを接触摺動によりガイドするカーブガイド1gを設けて、複数列で搬入されてくる容器Pを単列化集合するように構成した。
(もっと読む)
棒状部品の整列搬送装置および検査装置
【課題】ねじ・ピン等の棒状部品を確実に直立させて搬送するとともに、搬送中の棒状部品を撮像する部品検査において正確な良否判定を実現する検査装置を提供する。
【解決手段】ねじの端面を搬送面に吸着して搬送する回転テーブルと、回転テーブル上のねじの頭部を吸着して当該ねじを直立姿勢に矯正する矯正手段12とを備える整列搬送装置および検査装置1による。これら装置によると、ねじを確実に直立姿勢で搬送するができるとともに、搬送中のねじを撮像してこの撮像画像に基づく部品検査においても良否判定が正確になる。
(もっと読む)
果実の容器詰め装置
【課題】出荷パック内に見栄え良くイチゴを整列する。
【解決手段】制御部は、マシンビジョン62が取得した収穫箱70に収容されたイチゴの画像に基づいてイチゴの吸着位置を検出し、イチゴ搬送装置10に、収穫箱70に収容されたイチゴを吸着保持させるとともに、中継コンベア40上にイチゴを一旦載置させる処理と、マシンビジョンが取得した中継コンベアに載置されたイチゴの画像に基づいてイチゴの向き及び吸着位置を検出し、イチゴ搬送装置に、中継コンベアに載置されたイチゴを吸着位置にて吸着保持させるとともに、イチゴの向きに基づいて出荷パック52A〜52Dにイチゴを搬送させる処理とを実行させる。
(もっと読む)
オートフィーダ装置
【課題】積層された状態のシート状部材から順次シート状部材を供給でき、しかも、装置を小型化できるオートフィーダ装置を提供する。
【解決手段】立てて並べられた複数枚のシート状部材を水平にして排出する装置であって、シート状部材が載せられる上面を有する受入コンベア10と、受入コンベア10から供給されたシート状部材を搬送する排出コンベア20と、排出コンベア20の一端と受入コンベア10の排出側端部との間に設けられた、受入コンベア10から排出コンベア20に向かってシート状部材を搬送する連結コンベアと、を備えており、排出コンベア20は、その一端部上面が、受入コンベア10の上面よりも上方に位置するように配置されており、連結コンベアは、その上面が孤状または傾斜面に形成されたコンベアであり、排出コンベア20側の端部上面は、排出コンベア20の一端部上面と連続した面となるように形成されている。
(もっと読む)
容器処理装置
【解決手段】 容器処理装置1は、各バケット12内に角型の容器2を収容して搬送する第1搬送コンベヤ3と、第1搬送コンベヤ3によって搬送される容器2を撮影するカメラ4と、制御手段7によって作動を制御されて、バケット12内の容器2を吸着して取り出すロボットハンド6Aとを備えている。
カメラ4が撮影した容器2の画像が制御手段7へ伝達されると、制御手段7は、容器2の画像上の中心位置を求め、そこからバケット12の中心12cへ所定量ずらした位置を上記ロボットハンド6Aによる容器2の吸着位置として決定する。ロボットハンド6Aは、バケット12内で傾斜している容器2の側面2Bの上記吸着位置を吸着してバケット12内から取り出す。
【効果】 角型の容器2であってもロボットハンド6Aによって確実に吸着して取り出すことができる。
(もっと読む)
コンベヤ装置
【課題】駆動速度の異なる2列のコンベヤ83,85に受け皿11を跨らせて横回転させながら搬送することによって、前記受け皿11の搬送姿勢を揃えるコンベヤ装置80において、姿勢揃え時の脱落の衝撃で、前記受け皿11上の農産物Aが落下するのを防止できるようにする。
【解決手段】前記受け皿11が跨って載るように並列状に配置された2列のコンベヤ83,85群は、搬送面の高さ位置が高い方である高位置コンベヤ83と、低い方である低位置コンベヤ85とからなる。前記各コンベヤ83,85の駆動速度には前記各搬送面の高低差に対応した速度差を持たせる。前記受け皿11の外周下部に形成された段差部20が前記高位置コンベヤ83における前記低位置コンベヤ85寄りの角部83aに被さって嵌ることによって、前記受け皿11の一方向回転を停止させる。
(もっと読む)
冷凍品の製造方法及びその製造方法に用いられる容器
【課題】製品の歩留まりが高く且つ製品価値を高めることができ、更に内容重量に対する信頼性が高い冷凍品の製造方法及びその製造方法に用いる容器を提供する。
【解決手段】冷凍品の製造方法は、パン11内に蓋を開いた容器17を配置する容器配置工程と、容器17内に被収納物を収納して容器17に蓋をする充填工程と、パン11を容器17と共に冷凍庫で冷凍する冷凍工程と、冷凍庫から取り出したパン11の底を上に向けてパン11に加熱及び振動の少なくとも一方の外力を付与することにより容器11をパンから落下させる容器分離工程と、パンから落下した容器を上下反転させる反転工程とを備えている。
(もっと読む)
整列搬送装置
【課題】対象物の姿勢を常に安定姿勢に維持したまま、整列供給装置から搬送装置へと受け渡すことができる整列搬送装置を提供する。
【解決手段】対象物を一列に整列させて搬出部23から搬出する整列供給装置10と、整列供給装置10により整列された対象物が載置される2つの突条部32を備えた搬送ベルト31によって対象物を搬送する搬送装置30と、整列供給装置10から搬出された対象物Tを前記搬送装置30へと受け渡す受渡板50と、前記搬送装置30により搬送されている対象物に対して検査を実行する検査装置60とを備える。受渡板50は、その先端部から下方に傾斜するように延設された舌片部51を備え、この舌片部51は、その下端が突条部32の上面より下方に位置する。
(もっと読む)
1 - 20 / 203
[ Back to top ]