
Fターム[3F081FA02]の内容
コンベア上の物品の姿勢制御 (7,432) | 装置の駆動機構 (105) | 可変速駆動 (31)
Fターム[3F081FA02]に分類される特許
1 - 20 / 31
容器供給装置
【課題】上流の搬送コンベヤからその入口コンベヤを経由して前記容器処理機器へ容器を供給する容器供給装置において、入口コンベヤ上で容器処理機器に供給されつつある容器の密着量を所定量に維持しつつも、密着容器に変形或いは損傷を与えない。
【解決手段】上流の搬送コンベヤ7からその入口コンベヤ6を経由して容器処理機器5へ容器Bを供給する容器供給装置である。入口コンベヤ6上で容器処理機器5に供給されつつある容器B相互間の密着量を検知できる容器センサ9が設けられている。制御装置10は、容器センサ9によって検知した容器密着量に応じて搬送コンベヤ7の搬送速度(容器供給量)を制御する。
(もっと読む)
コンベヤ設備

【課題】本発明は、物品の搬送能力を高く保ち、仕分けをおこなえる間隔を確保できるコンベヤ設備を提供することを目的とする。
【解決手段】コンベヤ設備10は、物品12の搬送経路に沿って搬入用コンベヤ14、加速用コンベヤ16、搬出用コンベヤ18が並べられている。コンベヤ設備10は、物品12の大きさおよび間隔を測定する測定装置20、加速用コンベヤ16における物品12の位置を検出する検出装置22、および加速用コンベヤ16を制御する制御装置を備える。
(もっと読む)
搬送装置
【課題】耐久性の低下を可及的に招来することなく、被搬送物の搬送効率を向上することのできる搬送装置を提供する。
【解決手段】第1搬送経路R1上で移動する予め定められた載置目標場所に被搬送物Sを載置すべく、載置目標場所が3次元空間における予め定められた位置に到達するのと同期して、被搬送物Sを第1搬送経路R1と異なる第2搬送経路R2を介して前記予め定められた位置に搬送するための第2搬送部3と、第2搬送経路R2上の搬送出口ETに被搬送物Sが到達したことを検出する出口センサ16と、この検出時点における被搬送物Sの理想位置に対する実際位置の位置ずれ量を算出する走行距離検出処理部27と、被搬送物Sの検出時点から予め定められた搬送速度制御対象期間に、前記位置ずれ量に応じ、停止以外の速度範囲内で第2搬送部3の搬送速度を調整する搬送速度算出部28及び搬送制御部29とを備えた。
(もっと読む)
アキュムレーションコンベヤ
【課題】簡易な構成で、搬送物間の距離を好適に縮小して、アキュムレーション効率及び搬送効率を向上させる。
【解決手段】アキュムレーションコンベヤ10は、ゾーンZごとに設けられ、該ゾーンZを構成するキャリヤローラ18を回転駆動するモータ20と、ゾーンZごとに設けられ、搬送物Pの通過を検知するセンサ22と、センサ22により検知された隣り合う2つの搬送物の検知情報に基づいて、搬送物の間の距離に関する距離情報を推定し、その推定された距離情報が所定範囲内の場合に、上流側後方の搬送物が搬送されているゾーンZの搬送速度が、ゾーンZの下流側に隣接するゾーンZの搬送速度に対して相対的に速くなるように、ゾーンZのモータ20又はゾーンZのモータ20への制御入力を切り替える制御手段26と、を備える。
(もっと読む)
物品供給装置
【課題】高速包装処理時に前工程からの物品の供給に遅れが生じた場合、後工程の包装機への物品の供給タイミングに合わせて物品を移載できる装置を得る。
【解決手段】搬送コンベヤ5は前工程から搬送される物品を受入位置Aで区画部10に受け入れて排出位置Bまで搬送する。ロボット7は排出位置Bの区画部10から所定個数の物品を取り出す把持部16を有している。把持部16が搬送コンベヤ5から取り出した物品を、後工程の包装機3に接続した供給コンベヤ6に載置する。前工程から搬送される所定時間あたりの物品数に対する包装機3の処理能力の差によって、搬送コンベヤ5の受入位置Aから排出位置Bまでの区画部10に収容された物品の貯留量を変化させる際に、物品の貯留量を増加させる条件が満たされると包装機3の処理能力を低くし、物品の貯留量を減少させる条件が満たされると包装機3の処理能力を高くする。
(もっと読む)
整列装置
【課題】貯留部から汲上搬送した後の作物が下方に落下することを出来るだけ防ぐ整列装置を提供すること。
【解決手段】貯留部の作物を汲上搬送装置Bにより汲上搬送し、汲上搬送装置Bから排出される作物を整列搬送装置Cで受けて整列させながら搬送し、整列搬送装置Cから落下した作物を戻し部材64により貯留部Aに戻す整列装置において、汲上搬送装置Bの搬送始端側に落下する作物を受けて汲上搬送装置Bに戻す受け部74と汲上搬送装置Bの搬送終端側に作物を上方から押圧する押圧部材71と、受け部74と押圧部材71との間に作物が汲上搬送装置Bから落下することを防止する落下防止用紐部材72,73を設けた。
(もっと読む)
搬送位置決め装置及びラベル貼着装置
【課題】簡単な構造にて容易かつ効率的に対象物を回転及び搬送経路に従って搬送することが可能な搬送位置決め装置及びラベル貼着装置を提供する。
【解決手段】軸線周りに回転可能とされる対象物Wを搬送経路に従って搬送する搬送位置決め装置2であって、前記軸線が通過する軌跡に沿う接触部を有する第1周回ベルト31Aと、前記軌跡に沿う接触部を有し、前記軌跡を挟んで前記第1周回ベルト31Aと反対側に配置される第2周回ベルト32Aと、を含む回転方向調整部30と、回転方向調整部30に接続される制御部40とを備え、前記第1周回ベルト31Aと前記第2周回ベルト32Aは、前記対象物Wを挟むように構成され、前記制御部40は、前記第1周回ベルト31Aと前記第2周回ベルト32Aとを、相対速度差を設けて前進、停止、後退可能に構成されていることを特徴とする。
(もっと読む)
物品の切り出し装置及び整列装置
【課題】レトルトパウチのような袋状の物品にも適用でき、搬送コンベアの搬送速度と切り出しコンベアの搬送速度が大きく異なっている場合でも、切り出し後の物品間隔を高精度で一定にする。
【解決手段】物品切り出し装置の搬送コンベアと切り出しコンベアの間に加速/減速コンベアを設け、加速/減速コンベアは、少なくとも物品の一部が加速/減速コンベア上に来たときに低速運転から高速運転に加速し、少なくとも物品の一部が加速/減速コンベア上から外に出たときに高速運転から低速運転に減速し、切り出しコンベアは、搬送コンベアの搬送速度よりも高速で間欠運転し、少なくとも物品の一部が該切り出しコンベア上に来たときに1ピッチ分の搬送距離を運転することで、前記課題を解決する。
(もっと読む)
コンベア装置、並びに、コンベア制御装置
【課題】本発明は、搬送ライン上に載置された搬送物同士の間隔を確実に略一定に調整させて、効率的に搬送ができるコンベア装置を提供することを目的とした。
【解決手段】コンベア装置1は、計測手段を備え、搬送ラインに設けられた搬送物間調整領域Zには、駆動用モータの回転速度を可変とするモータ制御手段が備えられている。いずれかの搬送物検知手段Dの検知信号を受信して、計測手段により搬送方向に隣り合う搬送物同士の間隔あるいは搬送方向に隣り合う搬送物が搬送物検知手段Dを通過する時間差が計測されると、モータ制御手段により当該搬送物が載置されたゾーンの駆動用モータの回転速度を高速あるいは低速にさせる。
(もっと読む)
整列搬送装置
【課題】載置式の搬送コンベアで、平面形状が長方形や正方形の搬送物を、高速で精度よく所定の向きに整列できるようにすることである。
【解決手段】平面形状が長方形の搬送物Aを載置して搬送しながら方向転換する搬送コンベア1の下流側に、搬送物Aを載置して搬送しながら、搬送方向の左右で速度差を付与して搬送面内での向きを調整する向き調整コンベア2を連続させて接続し、向き調整コンベア2の上方に、搬送される搬送物Aを刻々撮像する2次元CCDカメラ3を配設し、2次元CCDカメラ3で刻々撮像される搬送物Aの所定の向きに対する傾きを検出して、検出された搬送物Aの傾きを小さくするように、向き調整コンベア2に左右での速度差を刻々付与し、搬送コンベア1から搬送されてくる搬送物Aを所定の向きに整列することにより、搬送物Aを高速で精度よく所定の向きに整列できるようにした。
(もっと読む)
知的製品供給システムおよび方法
【課題】知的製品供給システムを提供する。
【解決手段】知的製品供給システムは、複数の列として形成され各列が投入機構と送出機構の間の処理方向に沿って直列に配置された1以上の搬送モジュールを含む配列であって、搬送モジュールの少なくともいくつかが可変速度搬送モジュールであり、個々の可変速度搬送モジュールが、後続モジュールまたは送出機構へ製品を供給すべく先行モジュールまたは投入機構から製品を受け入れる第1端部から第2端部へ製品を搬送するモジュール搬送機構および製品搬送速度を制御すべくモジュール搬送機構に接続された速度制御要素を含む配列と、製品がどの経路を辿るかを記述する計画を作成し投入機構により配列へ不規則に配送された製品のグループを指定された製品構成に従い向きを揃えて同期的に送出機構へ搬送すべく列の少なくとも1個のモジュールを計画に従い動作させるべく速度制御要素と接続されたプランナとを含む。
(もっと読む)
アキュームコンベヤの搬送方法および装置
【課題】ペットボトルなどの容器の側面の傷付き、つぶれ、転倒を発生させないアキュームコンベヤの搬送方法および装置を提供する。
【解決手段】アキュームコンベヤ3を上流側から順に入口部コンベヤ35、能力調整用コンベヤ36、アキューム本体コンベヤ37に三分割し、入口部コンベヤの搬送速度を供給コンベヤ2よりも遅くして、入口部コンベヤの中央部に供給されたびん1が次第に入口部コンベヤの幅方向に分散しつつ溜まるように搬送し、能力調整用コンベヤの搬送速度を入口部コンベヤよりも遅く、かつ入口部コンベヤから搬送されてくるびんを能力調整用コンベヤのガイド幅一杯に配列して搬送した場合のライン能力速度に相当する速度に設定して、アキュームコンベヤ上で供給コンベヤから搬送されてきたびんが能力調整用コンベヤの搬送速度に規制されてさらに分散しつつ溜まるように搬送する。
(もっと読む)
物品の方向転換装置及び方向転換方法
【課題】物品の姿勢を搬送途中で方向転換させる場合において、その方向転換させた物品の姿勢が所望の姿勢に対してずれを生じるようなときには、そのような姿勢のずれが後続の物品において生じないように自動的に修正することができる物品の方向転換装置及び方向転換方法を提供する。
【解決手段】箱Bが跨って載ることができるように並列に配置された左右両搬送コンベア28a,28bの速度を箱Bの搬送方向に対する姿勢を回転させて方向転換させ得る速度差がつくように設定し、その箱Bの搬送方向に対する姿勢を搬送経路の途中の検出位置で検出し、その検出結果に基づき、箱Bの姿勢が所望の姿勢でない場合は、検出位置で姿勢を検出された物品及びその物品に後続して搬送される物品のうち少なくとも一方の物品の姿勢が方向転換終了時点において所望の姿勢に適合するように、予め設定されている各搬送コンベア28a,28bの速度設定内容を補正する。
(もっと読む)
菓子などの移乗配列装置
【課題】上流側から順次送り込まれてくる菓子などを、走行中の配列コンベア上に複数列の縦列に横一列に配列可能とする菓子などの移乗配列装置を提供することである。
【解決手段】菓子などを一列縦隊に順次送り込むと共に鉛直軸を支点として水平方向に首振り自在な旋回コンベア1と、横移動自在であり、下流側のベルトの折り返し部となるベルト受け部が菓子などの搬送方向に水平移動自在とされる分配コンベア2を介して、下流側の配列コンベアB上に複数列の縦列に配列すると共に、前記配列コンベアのコンベア速度と、前記分配コンベアのコンベア速度と、菓子などを送り込むタイミングとから、走行中の配列コンベア上に横一列に整列すると共に複数列の縦列に順次配列するように、前記分配コンベアの横移動と前記ベルト受け部の水平移動とを制御する制御装置50を備える構成とした。
(もっと読む)
製品を蓄積して輸送するための方法およびそのための低圧蓄積装置
本発明は、低圧蓄積装置内で製品を蓄積して輸送するための方法、および、そのための低圧蓄積装置に関する。本発明の目的は、製品を簡単な方法で蓄積でき、製品の蓄積を簡単な方法で制御できる方法および低圧蓄積装置を提供することである。結果として、本発明は、蓄積装置の蓄積動作中に製品を第1の蓄積経路と該第1の蓄積経路に直接に隣接して配置される第2の蓄積経路とに移動することを特徴とする方法、および、第1の蓄積経路に直接に隣接する第2の蓄積経路によって特徴付けられる低圧蓄積装置に関する。 (もっと読む)
ローラコンベヤ
【課題】搬送過程で物品を適切な間隔で切離す。
【解決手段】
ローラコンベヤでは、ローラの回転速度差による速度の波を搬送方向下流側へ推移させる波動パターンを生成し、該波動パターンに基づき各モータが制御手段により駆動制御される。制御手段により生成される波動パターンは、各波の高さおよび周期を搬送方向下流側へ向かうにつれ夫々比例的に増加する変化域を設け、その変化域において、各波の頂部は波の高さの変化率に対応した比例直線に沿う直線傾斜部Rを形成し、その直線傾斜部Rが各波の高さおよび周期の増加につれて減少する波形を変化させるように設定される。
(もっと読む)
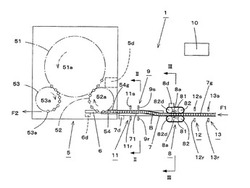
金属製容器の搬送装置及びそれを用いた容器の検査システム
【課題】より安定した姿勢を維持しつつ金属製の容器を整列させて搬送することのできる搬送装置を提供することである。
【解決手段】金属製の容器Cをコンベア10により連続的に搬送する搬送装置であって、コンベア10の第1整列領域E1に沿って、第1整列領域E内の容器Cの胴部を挟み込むように配置された少なくとも1対の第1環状ベルト(51a、51b)、(52a、52b)と、前記第1環状ベルトを、前記容器Cに接触する面がコンベア10による搬送方向Aにその搬送速度より遅い速度にて移動するように、駆動させる第1駆動機構(20a、20b、21a、21b、22a、22b、30a、30b、31a、31b、32a、32b、51a、51b、52a、52b、35)と、少なくとも第1整列領域E1からその下流側に続く所定領域における容器Cをコンベア10の下方から吸引する第1磁石部材61とを有する構成となる。
(もっと読む)
根菜作物の整列供給装置
【課題】根菜作物の整列供給装置の片側の系統におけるトラブルが生じても、滞ることなく、かつ、処理能力の低下を招くことなく、簡易な操作によって整列供給を継続することができる整列供給装置を提供する。
【解決手段】根菜作物の整列供給装置は、貯留部(2)に投入された根菜作物を引き上げる斜上移送部(3)と、その移送全幅の中央から左右に振分けする振分部(4)と、それぞれを受けて2列で整列移送する左右の整列移送部(5j、5k)とから構成され、上記振分部(4)は、幅方向のスライド動作により移送全幅について片側に振向けるスライド支持手段(4s)を備え、かつ、上記整列移送部(5j、5k)は、振分部(4)のスライド動作により振向けした側を増速駆動するとともに他側の駆動を停止する制御部を備えるものである。
(もっと読む)
搬送装置
【課題】搬送する物品の製造効率を低下させることなく、制御を簡単として貯留する物品の数量に応じた搬送経路長を容易に得ることができ、しかも、搬送ベルトにかかる負荷が軽減でき、構造が簡単でコンパクトな搬送装置を提供する。
【解決手段】保持プーリ14に掛け渡した牽引ベルト12の各端に第1移動部材16と第2移動部材17とを設ける。第1移動部材16に第1可動プーリ18を、第2移動部材17に第2可動プーリ19を設ける。第1駆動プーリ4と、第2駆動プーリ5と、両可動プーリ18,19に無端状の搬送ベルト22を掛け渡して設ける。第1駆動プーリ4のみを停止させたとき、第1移動部材16が両駆動プーリ4,5に接近する方向に移動して搬送ベルト22の往路長が短縮し、第2駆動プーリ5のみを停止させたとき、第2移動部材17が両駆動プーリ4,5に接近する方向に移動して搬送ベルト22の往路長が伸長する。
(もっと読む)
計量ベルト
製品を運搬するための移送区間で使用するための計量ベルトであって、駆動部によって駆動可能であるととともに、エンドレスに巡回する少なくとも二つの運搬ベルトが配備されており、それらの運搬ベルトが、それぞれの上方のループ長区間の側面を互いに隣接させて製品のための共通の水平又はほぼ水平な運搬面を形成する計量ベルトにおいて、運搬ベルトの巡回速度、従って移送速度を個別に設定することが可能である。 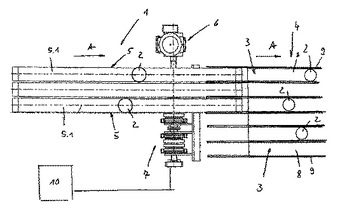 (もっと読む)
(もっと読む)
1 - 20 / 31
[ Back to top ]