
Fターム[3F111AA02]の内容
線条材料の張力調整 (1,009) | 線条材の張力調整の目的 (200) | 張力のプログラム制御 (19)
Fターム[3F111AA02]の下位に属するFターム
巻取側の巻径に応じて張力を変化 (7)
繰出し側の巻径に応じて張力を変化 (6)
Fターム[3F111AA02]に分類される特許
1 - 6 / 6
光ファイバの巻き取り方法及び巻き取り装置
【課題】光ファイバの張力変動を抑えて良好かつ円滑にボビンへ巻き取ることが可能な光ファイバの巻き取り方法及び巻き取り装置を提供する。
【解決手段】最終ガイドローラ20で光ファイバ心線2を案内して巻き取りボビン21に巻き取る光ファイバ心線2の巻き取り方法であって、巻き取りボビン21に巻き取られる直前の光ファイバ心線2の張力を測定し、測定張力Tsと予め設定された設定張力Tとの張力差ΔTに応じ、巻き取りボビン21の直前の最終ガイドローラ20に対してエア噴出ノズル31からエアを吹き付けて最終ガイドローラ20の負荷を調整する負荷調整制御を行う。
(もっと読む)
テンション装置

【課題】付勢部材の交換又は調整を行うことなく巻線に加えるテンションの変更ができるテンション装置を提供する。
【解決手段】テンション装置は、ボビンから導かれた巻線を巻線機に向かって繰り出すテンションプーリと、テンションプーリと巻線機との間で巻線を案内するアームプーリを先端に有し、基端を支点にして回動自在なテンションアームと、アームプーリがテンションプーリ及び巻線機から離間するようにテンションアームを付勢する付勢部材と、テンションアームの基端及び先端を結ぶ直線と、水平方向とのなす角度であるアーム角度を検出する角度検出部と、テンションプーリに結合され、テンションプーリを回転させるモータと、角度検出部が検出したアーム角度と、入力される目標アーム角度と応じてモータの駆動を制御して、巻線の繰り出す速度を増減させる制御部とを具備する。
(もっと読む)
糸巻取装置及び自動ワインダ
【課題】パッケージの巻取テンションを一定の状態に制御できる自動ワインダを提供する。
【解決手段】自動ワインダは、パッケージ30を回転させるためのドラム駆動モータ53と、パッケージ30に巻き取られる前の糸を貯留でき、この貯留した糸を給糸ボビン21側に引き出すことができるアキュムレータ61と、糸欠陥を検出するためのクリアラ15と、糸継作業を行うスプライサ装置14と、を備える。また、自動ワインダは、給糸ボビン21とアキュムレータ61との間に配置される第1テンサ41と、アキュムレータ61とパッケージ30との間に配置される第2テンサ42と、第1テンサ41及び第2テンサ42を制御するユニット制御部50と、を備える。
(もっと読む)
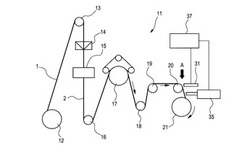
糸巻取方法及び糸巻取装置
【課題】綾落ちのない高品質なパッケージ7を形成できる糸巻取方法を提供する。
【解決手段】自動ワインダ1の糸巻取ユニット2は、糸巻取用の巻取ボビン6,7を回転駆動するためのパッケージ駆動モータ41と、巻取ボビン6,7への糸4の巻取りの際にその糸4を綾振るためのトラバース装置5と、を備える。トラバース装置5は、糸4と係合して糸4を綾振りさせるためのトラバースガイド11と、パッケージ駆動モータ41とは切り離されて駆動し、トラバースガイド11を移動させるためのトラバースガイド駆動モータ45と、を有する。巻取チューブ6への糸4の巻始めの時や、糸切断や糸切れ後に糸継装置14の糸継作業が完了した後の巻取再開時においては、巻取ボビン6,7の回転が開始されるが、その開始直後を含む回転加速区間において、前記トラバースガイド11のトラバースストロークを狭めるように前記トラバースガイド駆動モータ45を制御する。
(もっと読む)
綾巻きパッケージを製造する繊維機械の作業部位を運転する方法
本発明は、綾巻きパッケージを製造する繊維機械の作業部位を運転する方法であって、綾巻きパッケージの巻取速度を調節するための回転数調整可能な巻取駆動装置が設けられており、供給ボビンから紡出される糸の糸張力を監視するための、作業部位計算機と接続された糸張力センサが設けられており、糸張力を調整するための糸テンショナが設けられている方法に関する。本発明によれば、作業部位計算機(32)で、所望の糸張力(FZKsoll)の値ならびに該所望の糸張力(FZKsoll)からの許容パーセント偏差の値(TG)を調節することができ、糸張力(FZKsoll)の許容パーセント偏差の超過が生じると、直ちに作業部位計算機(32)によって巻取過程を中断する。 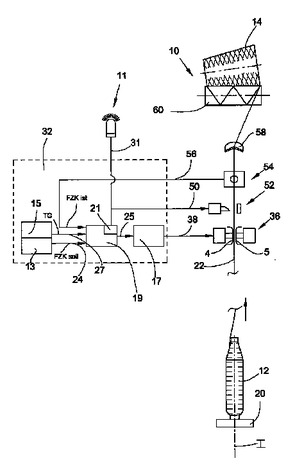 (もっと読む)
(もっと読む)
線条体用アキュムレータ
【課題】 線条体の入出線状態にかかわらず、線条体にかかる張力を一定に保つことができる線条体用アキュムレータを提供する。
【解決手段】 アキュムレータ6は、固定シーブ12と、この固定シーブ12に対して近接・離隔可能な移動シーブ14と、移動シーブ14を固定シーブ12に対して離隔する方向に牽引する牽引ユニット15と、移動シーブ14の移動方向を検出する回転計19と、コントローラ20とを有している。固定シーブ12及び移動シーブ14は、スロット9をガイドするものである。コントローラ20は、スロット9の入出線状態(平衡、放線、貯線)に応じてスロット9にかかる張力を一定にするための牽引力データを予め記憶しておき、回転計19の検出信号からスロット9の入出線状態を判断し、そのスロット9の入出線状態に対応する牽引力データに従って牽引ユニット15のモータ18のトルクを制御する。
(もっと読む)
1 - 6 / 6
[ Back to top ]