
Fターム[3F115CA58]の内容
パッケージ・線条体の安全装置 (910) | 目的、機能 (242) | 糸速制御 (2)
Fターム[3F115CA58]の下位に属するFターム
定速度制御
Fターム[3F115CA58]に分類される特許
1 - 2 / 2
糸巻取装置及び糸巻取方法
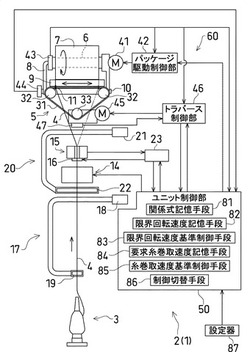
【課題】糸を巻き取るための巻取ボビン6,7を回転駆動するパッケージ駆動モータ41と、糸を綾振るためのトラバース装置5と、を備え、このトラバース装置が、トラバースガイド11と、トラバースガイド駆動モータ45と、を有する糸巻取ユニット2を用いて、巻取開始から巻取終了まで単一のワインド数WNを保ちながら巻き取り、かつトラバースガイド駆動モータ45の故障、発熱、脱調等を防止できる糸巻取方法を提供する。
【解決手段】巻取ボビン径Dが所定の限界径Dendになるまでは、限界回転速度基準制御手段83により、前記トラバースガイド駆動モータ45の回転速度Tが限界回転速度Tmax以下になるように前記パッケージ駆動モータ41の回転速度Tを調整する。巻取ボビン径Dが限界径Dendに到達した後は、糸巻取速度基準制御手段85により、糸巻取速度WSが要求糸巻取速度WSdとなるように前記パッケージ駆動モータ41の回転速度Bを調整する。
(もっと読む)
糸巻取装置の糸速度検出装置、及びトラバース装置の糸綾振り速度検出装置

【課題】糸巻取用の巻取ボビン6,7を回転駆動するパッケージ駆動モータ41と、このモータ41とは切り離されて駆動し、前記糸巻取の際に糸を綾振るためのトラバース装置5とを備えた糸巻取装置において、糸の走行速度を精度良く検出できる糸速度検出装置を提供する。
【解決手段】巻取ボビン6,7に糸4が巻き取られて形成された糸層の周面の周方向の糸層周面移動距離ΔPLsを検出する手段73と、糸層の幅方向の糸のトラバース移動距離ΔTLsを検出する手段74と、糸層周面移動距離演算手段73で検出されたΔPLsとトラバース移動距離演算手段74で検出されたΔTLsをそれぞれ入力し、入力されたΔTLs及びΔPLsから、糸がnトラバースストローク分(n≧1)移動するのに必要な時間当たりの糸層周面移動距離及びトラバース移動距離をそれぞれ計算し、この計算結果に基づいて糸の走行速度を求める糸速度演算手段77と、を備える。
(もっと読む)
1 - 2 / 2
[ Back to top ]