
Fターム[3F115CB08]の内容
パッケージ・線条体の安全装置 (910) | 検出対象(入力) (202) | 糸走行状態検知 (95) | 張力 (20)
Fターム[3F115CB08]に分類される特許
1 - 20 / 20
糸巻取装置及びテンション確認方法
【課題】 テンションセンサの測定精度を容易に確認することができる糸巻取装置及びそのような糸巻き取り装置を用いたテンションセンサの調整方法を提供する。
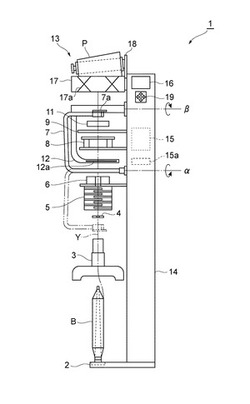
【解決手段】 給糸ボビンBの糸YをパッケージPに巻き取る巻取ユニット1であって、糸Yのテンションを測定するテンションセンサ6と、給糸ボビンBの糸YをパッケージPに巻き取る運転モード、及びテンションセンサ6によって測定された糸Yのテンションを確認するメンテナンスモードを含む複数の動作モードを相互に切り替える制御部15と、を備える。
(もっと読む)
糸巻取装置、自動ワインダ及び繊維機械

【課題】 糸の強力を容易にかつ正確に測定することができる糸巻取装置、自動ワインダ及び繊維機械を提供する。
【解決手段】 巻取ユニット30は、給糸ボビン6の糸Yを巻き取ってパッケージPを形成する装置である。巻取ユニット30は、ボビン支持部31と、巻取部32と、強力測定部100と、を備えている。ボビン支持部31は、給糸ボビン6を支持する。巻取部32は、ボビン支持部31に支持された給糸ボビン6の糸YをパッケージPとして巻き取る。強力測定部100は、ボビン支持部31と巻取部32との間において、給糸ボビン6から引き出された糸Yの強力を測定する。
(もっと読む)
ワインダを動作させる方法およびワインダ
【課題】糸テンションを表す量を測定するセンサが故障した場合、糸テンションが個々の作業ユニット部において閉ループ制御されるワインダの挙動を改善すること。
【解決手段】上記の紡績コップに残っている糸の長さを表す量をそれぞれ検出し、この紡績コップに残っている糸の長さに依存して、閉ループ制御された糸テンションによる巻き取り中に検出した少なくとも1つの調整信号から、この調整信号に対する経験値を求め、1つのセンサが故障した場合、糸テンショナによって糸テンションを開ループ制御するため、紡績コップに残っている糸の長さに依存して、前に求めた前記の調整信号に対する経験値を調整信号として使用する。
(もっと読む)
紡績ユニット
【課題】巻取装置による紡績糸の綾振が糸欠点検出装置による欠点部の検出精度に影響を与える恐れがなく、更に、紡績糸に掛かる張力を適度に保つとともに、安定させることによって糸欠点検出装置による欠点部の検出精度を向上させるとした紡績ユニットを提供する。
【解決手段】繊維束Fを牽伸するドラフト装置5と、ドラフト装置5により牽伸された繊維束Fから紡績糸Yを製造する紡績装置6と、紡績装置6により製造された紡績糸Yの張力を安定させる張力安定装置8と、張力安定装置8から送り出された紡績糸Yをパッケージ91へと巻回する巻取装置9と、紡績糸Yの欠点部を検出可能とする糸欠点検出装置7と、を備える紡績ユニット1であって、糸欠点検出装置1は、紡績装置6と張力安定装置8との間に配置するとした。
(もっと読む)
繊維機械への糸供給を制御するのに適するプログラマブルセンサ及びセンサのプログラミング方法
【解決手段】
繊維機械(T)の支持体に設けられ又は繊維機械の近傍に位置付けられるのに適した本体部又はケーシング(2)を備え、繊維機械への撚り糸又は糸(F)の少なくとも1種の供給特徴を検知するのに適した検出手段(4)を有するセンサ。前記センサの本体部又はケーシング(2)内には、前記検出を制御し、前記本体部又はケーシング(2)に設けたメモリ手段(11)にストアされた複数個の制御アルゴリズムに従って前記撚り糸又は糸の制御モードを変更するのに適した手段(10)が、設けられ、使用者が前記複数個の制御アルゴリズムの一つを選択して、前記撚り糸又は糸の供給制御中、前記センサの所望の運転モードを選択できるのに適したセレクター手段(13)も、前記前記本体部又はケーシング(2)に設けられる。前記所望のセンサ動作モードを選択する方法も、クレームされている。
(もっと読む)
繊維機械
【課題】 オペレータによる玉揚げ作業がドッフィングタイマの報知に従って玉揚げ時間中に行われない場合でも、品質管理データとパッケージとを対応付けることができる繊維機械の提供を目的とする。
【解決手段】 ドッフィングタイマ65によりパッケージPの満管を報知する繊維機械であって、パッケージPの回転状態を検出する回転状態検出部48と、回転状態検出部48からの検出信号に基づいて、玉揚げ作業が行われたことを判定する玉揚げ判定部61と、パッケージPの品質管理データを記憶し、玉揚げ判定部61からの玉揚げ信号に基づいて、品質管理データの記憶を完了するデータ管理部62と、を備えた繊維機械とする。
(もっと読む)
糸状態検知装置、及び、これを備えた繊維機械
【課題】走行する糸の状態が正常状態にあるか、糸切れ状態にあるか、過テンション状態にあるか、を安価かつ簡素な構成で検知する技術を提供する。
【解決手段】ヤーンフィーラ16は、走行する合糸Yの状態を検知する装置であって、回路遮断状態と回路短絡状態の二つの状態を有するセンサ本体32を備える。走行する合糸Yの状態が正常状態と、糸切れ状態又は過テンション状態と、の間で切り替わることにより、センサ本体32の状態が回路遮断状態と回路短絡状態の間で切り替わる。
(もっと読む)
繊維機械の延伸システム、例えば練篠機、カード機、コーマにおいて少なくとも一つの移動する繊維スライバを監視する監視装置
【課題】繊維スライバの破断または停止を短時間で確実に監視することのできる単純な監視装置を提供する。
【解決手段】繊維機械の延伸システム、例えば練篠機、カード機、コーマにおいて少なくとも一つの移動する繊維スライバを監視する監視装置であって、移動する繊維スライバに接触して位置決めされる監視要素を使用しており、少なくとも一つの繊維スライバを延伸システムまで供給する供給装置の近傍または供給装置内に配置されるという監視装置であって、前記繊維スライバ(7、7a〜7f)のための監視要素(12)は、テンションが掛けられた前記繊維スライバ(7、7a〜7f)により偏向されるよう配置された偏向要素(12b、12b1〜12b6)を含んでおり、前記繊維スライバ(7、7a〜7f)のテンションが喪失したときには、前記偏向要素はスイッチ動作を開始する、監視装置が提供される。
(もっと読む)
自動ワインダ、自動ワインダの動作不良検出方法
【課題】巻取中の糸の巻取テンションを測定するテンションセンサーのテンション測定値から、容易に動作不良となっている巻取ユニット構成部材を検出することができる自動ワインダ、及び自動ワインダの動作不良検出方法を提供すること。
【解決手段】給糸ボビン3から解舒された糸Yを糸道を通して巻取装置4に導き、該巻取装置4のパッケージPに巻き取ってパッケージ Pを製造する巻取ユニット1を備えた自動ワインダにおいて、糸道を通る糸Yのテンションを測定するテンションセンサー18と、該テンションセンサー18で検出したテンション測定値から巻取ユニット1を構成する複数の構成部材内の動作不良となっている構成部材を検出する構成部材動作不良検出部22を設けた。
(もっと読む)
テンションセンサ及び自動ワインダ
【課題】簡単な構造で自動ワインダの部品点数を増加させることなく、糸の張力を安定した状態で正確に測定することができるようにする。
【解決手段】給糸ボビン12から解舒されてパッケージPに巻き取られる糸のテンションを検出するテンション検出部31aと、テンション検出部31aの上流側の糸道Yで糸を支持する上流側糸支持部材35と、テンション検出部31aの下流側の糸道Yで糸を支持する下流側糸支持部材33とを備え、テンション検出部31aに対して糸が所定角度を成した状態で接触するようにしたテンションセンサ30において、上流側糸支持部材35と下流側糸支持部材33が糸道Yに対して互いに対向する側から糸に接触するようにした。これにより、上流側糸支持部材35や下流側糸支持部材33を可動部品としなくても、糸道Yに糸を導入することが可能となる。
(もっと読む)
チューブ切断装置
【課題】長さが異なる複数種類のチューブを目的長さに切断するとともに、種類ごとに適正な識別マークを表示させるといった作業を自動化してミスを解消する。
【解決手段】複数種類のチューブTをストックする複数のリール13を回転ステージ5に支持し、回転ステージ5を回転させて必要なチューブTの先端部をチューブ引き出し位置に位置付け、チューブ引き出し装置40で所定長さ引き出す。引き出したチューブTを、第1,第2のベルトローラ装置50A,50Bでベルトコンベヤ装置130A,130Bに送り出し、ベルトコンベヤ装置からバスケット装置140内に導入して収容する。チューブTの搬送中に、印字装置110によってチューブTにチューブ情報を印字し、引き出し長さが目的長さに到達したらカッタ装置70でチューブTを切断する。
(もっと読む)
線状部材のテンション測定装置及び測定方法
【課題】配列された複数本の線状部材のテンションを簡単な構成で連続的に順次測定できるようにする。
【解決手段】線状部材Sのテンションを測定可能な検出センサ10を、線状部材Sの長手方向と交差する方向に移動させ、ガイド部材11により移動方向前方側の線状部材Sを案内して、検出センサ10のテンションの検出部10Aに順次接触させる。このように順次接触する線状部材Sのテンションを検出センサ10により測定しつつ、検出センサ10を、複数本の線状部材Sの配列方向の一端側から他端側に向かって移動させて、線状部材Sのテンションを検出センサ10により移動方向に沿って連続的に順次測定する。
(もっと読む)
毛羽立ち度測定装置
【課題】炭素繊維糸条に種々の加工を加える際に、炭素繊維糸条の表面に発生する毛羽立ちの程度を、実際の加工工程における毛羽立ちの程度に近い実用上有効な精度で測定できる炭素繊維糸条の毛羽立ち度測定装置を提供する。
【解決手段】走行中に擦動を加えられた炭素繊維糸条の毛羽立ち度を測定する装置であって、炭素繊維糸条の繰出しボビン(A)と、走行する炭素繊維糸条の張力測定装置(B)と、炭素繊維糸条がその走行軸を中心として螺旋運動するように、その内側面が炭素繊維糸条に擦動を加えながら該走行軸に垂直な面内を走行軸を中心として円運動する擦動リング(C)と、炭素繊維糸条を所定速度で引取る可変速度ローラー(D)と、炭素繊維糸条の毛羽立ち度を計測する毛羽立ち度計測装置(E)を備えた毛羽立ち度測定装置。
(もっと読む)
線材の巻取方法
【課題】 巻太りや巻細りの検出感度が高く、しかも、トラバース反転位置の制御に速やかにフィードバックできる線材の巻取方法を得る。
【解決手段】 巻取ボビン5に接近したパスラインで線材3に作用する巻取り張力を検出する張力検出手段13を備え、トラバース反転位置を制御するトラバース制御回路11では、巻取ボビン5の鍔部5b,5cからボビン軸方向内側に所定距離以上離れた所定の領域での巻取り張力の平均値を基準張力として、、この基準張力をもとに算出される評価基準値を設定して、巻取ボビン5の鍔部5b,5cからボビン軸方向への離間距離が所定距離未満になる領域での巻取り張力と評価基準値とを所定の基準で比較して巻太り又は巻細りを判定して、トラバース反転位置を自動調整する。
(もっと読む)
ポリ乳酸繊維のチーズ状パッケージ
【課題】複数のパッケージの糸端同士を結んで高次工程を連続操業する場合、その高次加工性と製品品位の向上を可能にするポリ乳酸繊維のチーズ状パッケージの提供。
【解決手段】50重量%以上が乳酸モノマーで構成されるポリ乳酸からなり、伸度が30〜100%であるマルチフィラメントがボビンに巻き付けられたパッケージであり、該パッケージ最内層に巻き付けられたマルチフィラメントの伸度を該最内層より外層側に巻き付けられたマルチフィラメントの伸度に対し5%以下の伸度差にした構成からなるポリ乳酸繊維のチーズ状パッケージである。
(もっと読む)
綾巻きパッケージを製造する繊維機械の作業部位を運転する方法
本発明は、綾巻きパッケージを製造する繊維機械の作業部位を運転する方法であって、綾巻きパッケージの巻取速度を調節するための回転数調整可能な巻取駆動装置が設けられており、供給ボビンから紡出される糸の糸張力を監視するための、作業部位計算機と接続された糸張力センサが設けられており、糸張力を調整するための糸テンショナが設けられている方法に関する。本発明によれば、作業部位計算機(32)で、所望の糸張力(FZKsoll)の値ならびに該所望の糸張力(FZKsoll)からの許容パーセント偏差の値(TG)を調節することができ、糸張力(FZKsoll)の許容パーセント偏差の超過が生じると、直ちに作業部位計算機(32)によって巻取過程を中断する。 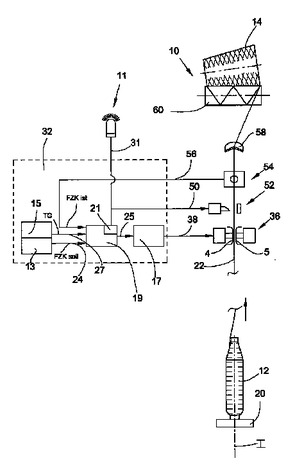 (もっと読む)
(もっと読む)
小割システム及び小割方法
【課題】 給糸パッケージ3の糸を引き出して巻取装置6で複数のボビン8に所定長ごとに分割して巻き取る小割システム1において、給糸パッケージ3の解舒初期・終期を問わず、均質な品質の小割パッケージ9を形成できるようにする。
【解決手段】 給糸パッケージ3から解舒された糸Yを前記巻取装置6で巻き取られる前に測長及び貯溜する測長貯溜装置5を備える。また、この測長貯溜装置5から下流側へ送られる糸の張力を調整するテンサ7を備える。
(もっと読む)
同心円芯鞘複合繊維のチーズ状パッケージおよび製造方法
【課題】 生産性がよく、布帛にしたときに均一な表面感、染色の均一性が得られるポリエステル芯鞘型複合繊維が巻きつけられたパッケージを提供する。
【解決手段】 ポリエチレンテレフタレートを主成分とするポリエステルを芯成分に配し、ポリトリメチレンテレフタレートを主成分とするポリエステルを鞘成分に配した、長手方向に同心円芯鞘断面形状を有する複合繊維が巻き付けられ、以下の(1)〜(3)の条件を満たすことを特徴とするチーズ状パッケージ。
(1)チーズ状パッケージのふくらみ率が−5〜5%
(2)チーズ状パッケージの耳高率が0〜5%
(3)ふくらみ率の経時変化率が50%以下
(もっと読む)
テンション監視装置
【課題】 ルーズターンが発生する可能性のある異常現象を検出するテンション監視装置を提供することを目的とする。
【解決手段】 回動支点の回りで回動可能なテンションバー10と、このテンションバー10に取り付けられた線材ガイド11と、テンションバー10の回動支点と線材ガイド11との間の所定位置においてテンションバー10にその回動角度に応じた弾性力を及ぼすスプリング14と、テンションバー10の回動角度を検出するポテンショメータ13と、このポテンショメータ13により検出された回動角度が所定の角度となるように線材の繰り出し速度を制御する繰り出し制御モータ6と、テンションバー10の回動角度と予め設定された基準回動角度とを比較し異常を判定するテンション異常判定手段18とを備えることを特徴とする。
(もっと読む)
糸引出し装置
本発明は連続的に引出し可能な糸を準備するための糸引出し装置並びに該糸引出し装置を備えたテクスチャード加工機に関する。公知技術によれば糸引出し装置は少なくとも1つの給糸ボビンと少なくとも1つのリザーブボビンとを有している。この給糸ボビンとリザーブボビンの糸始端部と糸終端部は互いに結節されている。給糸ボビンからリザーブボビンに移行する引出された糸はセンサによって認識される。これは移行に際して不作用位置から告知位置へ動かされる可動な糸ガイドによって行なわれる。可動な糸ガイドのはね返えりを回避するためには、糸ガイドもしくは該糸ガイドに結合されたエレメントには第2の運動自由度が与えられている。適当に形成されたカーブによって2つの運動自由度は、糸ガイドが告知位置を後にすることが幾何学的に可能ではなくなるようにはね返えり後の運動がコントロールされるように協調される。 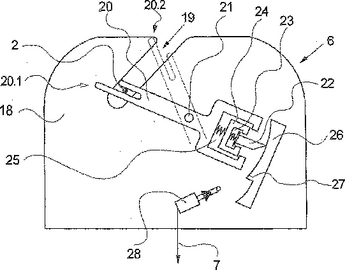 (もっと読む)
(もっと読む)
1 - 20 / 20
[ Back to top ]