
Fターム[3F115CC01]の内容
パッケージ・線条体の安全装置 (910) | 検出手段 (119) | 固定素子 (14)
Fターム[3F115CC01]に分類される特許
1 - 14 / 14
糸巻取装置及びテンション確認方法
【課題】 テンションセンサの測定精度を容易に確認することができる糸巻取装置及びそのような糸巻き取り装置を用いたテンションセンサの調整方法を提供する。
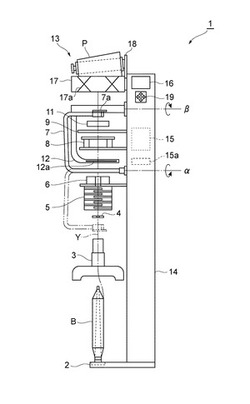
【解決手段】 給糸ボビンBの糸YをパッケージPに巻き取る巻取ユニット1であって、糸Yのテンションを測定するテンションセンサ6と、給糸ボビンBの糸YをパッケージPに巻き取る運転モード、及びテンションセンサ6によって測定された糸Yのテンションを確認するメンテナンスモードを含む複数の動作モードを相互に切り替える制御部15と、を備える。
(もっと読む)
糸巻取装置

【課題】糸巻取装置の製造を簡単にするとともに、製造コストを抑える。
【解決手段】同一材料からなる同一形状の2つのガイド部材44、45が、互いに対向するように配置されていることにより、これらの間に糸Yが通過するスリット55が形成されている。ガイド部材45は、揺動アーム43とともに揺動軸51を中心に揺動することで、ガイド部材44との間にスリット55を形成する位置と、ガイド部材44から離隔した位置との間で移動可能となっている。ガイド部材44などが取り付けられた基材41のスリット55と重なる部分に、前端が開口した切り欠き41aが形成されており、切り欠き41aの後側の壁により、糸Yがスリット55の後側から抜け落ちてしまうのが防止される。また、揺動アーム43は、スリット55を横切る部分を有し、この部分により、糸Yがスリット55の前側から抜け落ちてしまうのが防止される。
(もっと読む)
糸巻取装置、自動ワインダ及び繊維機械
【課題】 糸の強力を容易にかつ正確に測定することができる糸巻取装置、自動ワインダ及び繊維機械を提供する。
【解決手段】 巻取ユニット30は、給糸ボビン6の糸Yを巻き取ってパッケージPを形成する装置である。巻取ユニット30は、ボビン支持部31と、巻取部32と、強力測定部100と、を備えている。ボビン支持部31は、給糸ボビン6を支持する。巻取部32は、ボビン支持部31に支持された給糸ボビン6の糸YをパッケージPとして巻き取る。強力測定部100は、ボビン支持部31と巻取部32との間において、給糸ボビン6から引き出された糸Yの強力を測定する。
(もっと読む)
糸送り装置、繊維機械及び繊維機械の糸巻き取り方法
【課題】1つのフィードローラで送られる2本の糸を1つのガイドの2つの糸掛け部に簡単に糸掛けする。
【解決手段】第3糸送り装置22は、フィードローラ40と、ニップローラ41と、ガイド42とを有している。フィードローラ40とニップローラ41の間に糸Yが挟まれた状態で、フィードローラ40が回転駆動すると、このフィードローラ40の回転にともないニップローラ41も回転する。すると、糸Yには所望のニップ力が付与されて下流側に送られる。ガイド42は、主機台2aのバーサポート35に係合されたトラバースバー36に支持され、作業空間3に向かって水平方向に延在した板状のブラケット43と、ブラケット43の両側に設けられ、2本の糸Yがそれぞれ掛けられる2つの糸掛け部44a、44bとを有している。
(もっと読む)
糸巻取装置用の回路基板及び糸巻取装置
【課題】巻取部の異常振動を正確に検出する。
【解決手段】糸巻取ユニット1用の回路基板105は、回路基板本体105aと、回路基板本体105aに設けられた振動検出チップ109とを備えている。
(もっと読む)
糸走行情報取得装置及び糸巻取機
【課題】正確な糸走行情報を取得することができる糸走行情報取得装置を提供する。
【解決手段】第1糸ムラセンサ43は、走行する糸の太さムラを検出して第1糸太さムラ信号を出力する。第2糸ムラセンサ44は、前記第1糸ムラセンサ43から所定の間隔を隔てて配置され、前記糸の太さムラを検出して第2糸太さムラ信号を出力する。類似度評価部65は、下流側フレームと上流側フレームを比較して、前記第1糸太さムラ信号と前記第2糸太さムラ信号との類似度を求める類似度評価処理を、上流側フレームの先頭位置を変化させて複数回行うことで複数の前記類似度を求める。重み付け処理部66は、前記複数の類似度に対して重み付けを行い、複数の重み付き類似度を求める。走行情報取得部67は、前記重み付き類似度に基づいて、前記第1糸太さムラ信号と前記第2糸太さムラ信号との時間的なズレ量を算出するとともに、前記ズレ量に基づいて糸走行情報を取得する。
(もっと読む)
糸センサ、及び、この糸センサを備えた繊維機械
【課題】固有の検出特性のバラツキの影響を補正によって除去するとともに、交換の度にその補正情報を設定することが不要な、糸センサを提供すること。
【解決手段】糸センサ24は、走行する糸Yの走行速度に対応した検出信号を発信する検出部40と、検出部40に固有の補正情報を記憶する記憶部41と、検出部40から発信された検出信号を、記憶部41に記憶された補正情報を用いて補正する演算部42と、演算部42で補正された後の補正済み信号を出力する信号出力部43とを備えている。
(もっと読む)
紡機の糸切れ検出装置
【課題】糸継ぎ作業の邪魔にならず、保全作業性の良い紡機の糸切れ検出装置を提供する。
【解決手段】リングプレート11の上面にはトラベラ13を検知する検知部14aを備えたセンサ14がリングプレート11の後側に設けられている。センサ14の検知信号を処理して糸切れの有無を判断するCPU15を備えた制御基板16がリングプレート11の前側に設けられている。センサ14とCPU15とはリングプレート11の下面側に配置されたフレキシブル配線22,27や制御基板16及び信号伝達用基板17上の信号配線を介して電気的に接続されている。制御基板16及び信号伝達用基板17は、リングプレート11の前壁11bに固定されるとともにリングプレート11に沿って延びる収容部24aを備えた支持部材24に支持されている。
(もっと読む)
糸条の走行監視装置
【課題】本発明の目的は、毛羽が存在しないかあるいはほとんど存在しないフィラメント糸の走行を監視することができる装置を提供することにある。
【解決手段】走行監視装置10は、走行する糸条12に光Lを照射する光源14と、糸条12に対して光源14とは反対方向に配置された差動型空間フィルタ素子16と、差動型空間フィルタ素子16の出力から糸条12の走行の有無を判断する信号処理回路18とを含む。本発明は糸条12の走行を監視するために、受光素子20a、20bのピッチを糸条12の凹凸の大きさと略同じとしている。
(もっと読む)
リング精紡機の複数の作業個所を監視する装置及び方法
リング精紡機(1)の複数の作業個所(3〜5)を監視する装置は、糸(22)の継続処理機(2)に設けられている少なくとも1つの糸検査器(25)と、糸検査器(25)に接続される監視装置(17)とを持っている。リング精紡機(1)の作業個所(3〜5)の確実で欠陥のない安価な確認を保証するため、作業個所(3〜5)のそばを通過可能で信号を無接触で受ける検知ヘッド(8)が設けられて、監視装置(17)に接続され、かつ作業個所を監視する第1のセンサ(30)と、作業個所にある糸巻き管(28)のデータを検出する第2のセンサ(31)とを持っている。 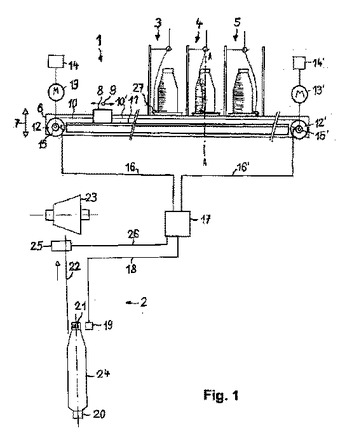 (もっと読む)
(もっと読む)
繊維機械
【課題】各作業ユニットの状態を高精度に把握することが可能な繊維機械を提供すること。
【解決手段】自動ワインダの巻取ユニット2は、給糸ボビン4、巻取管7、糸継装置14、及び、毛羽伏せ装置13にそれぞれ設けられたICタグ40〜43から照合情報を取得し、その照合情報をユニットコントローラ32に送信するアンテナ35を備えている。そして、複数の巻取ユニット2を監視及び制御するホストコントローラ31は、アンテナ35で取得された情報に基づいて、各巻取ユニット2のICタグ40〜43が正規なものか否かを判断して、正規でない場合には、その巻取ユニット2に対して糸巻取処理を禁止する信号を出力する。
(もっと読む)
糸巻取装置の糸速度検出装置、及びトラバース装置の糸綾振り速度検出装置
【課題】糸巻取用の巻取ボビン6,7を回転駆動するパッケージ駆動モータ41と、このモータ41とは切り離されて駆動し、前記糸巻取の際に糸を綾振るためのトラバース装置5とを備えた糸巻取装置において、糸の走行速度を精度良く検出できる糸速度検出装置を提供する。
【解決手段】巻取ボビン6,7に糸4が巻き取られて形成された糸層の周面の周方向の糸層周面移動距離ΔPLsを検出する手段73と、糸層の幅方向の糸のトラバース移動距離ΔTLsを検出する手段74と、糸層周面移動距離演算手段73で検出されたΔPLsとトラバース移動距離演算手段74で検出されたΔTLsをそれぞれ入力し、入力されたΔTLs及びΔPLsから、糸がnトラバースストローク分(n≧1)移動するのに必要な時間当たりの糸層周面移動距離及びトラバース移動距離をそれぞれ計算し、この計算結果に基づいて糸の走行速度を求める糸速度演算手段77と、を備える。
(もっと読む)
繊維機械
【課題】パッケージを生産する繊維加工ユニットを多数備える繊維機械において、糸速センサーに固有の誤差のため、各錘で糸速センサーの検出する糸速に基づいてパッケージの糸長さを均一にしようとしても、実際に生産されたパッケージの糸長さは全錘で不均一となってしまう。
【解決手段】糸速を検出する糸速センサー7と、この糸速センサー7の検出値に基づいて、巻取りパッケージ4の糸長さを算出するシーケンサー12と、巻取りパッケージ4を形成する巻取り装置20と、を備えるワインディングユニット1を、多数備えるワインダー100であって、各糸速センサー7に対応する補正情報を、各シシーケンサー12に送信する設定器41を備え、各シーケンサー12は、各糸速センサー7の検出値を前記補正情報に基づいて各糸速の補正値を算出し、これらの各糸速の補正値に基づいて、各巻取りパッケージ4の糸長さを算出する。
(もっと読む)
糸巻取装置の糸長測定装置
【課題】糸巻取用の巻取ボビン6,7を回転駆動するパッケージ駆動モータ41と、このモータ41とは切り離されて駆動し、前記糸巻取の際に糸を綾振るためのトラバース装置5とを備えた糸巻取装置において、糸巻取長さを精度良く測定できる糸長測定装置を提供する。
【解決手段】巻取チューブ6に糸4を巻き取って形成した糸層の周面の周方向の糸層周面移動距離ΔPLsを検出する手段73と、糸層の幅方向の糸のトラバース移動距離ΔTLsを検出する手段74と、糸層周面移動距離演算手段73で検出されたΔPLsとトラバース移動距離演算手段74で検出されたΔTLsをそれぞれ入力し、入力されたΔTLs及びΔPLsから、所定時間Tsごとに巻取ボビン6,7に巻き取った糸4の巻取長さを計算し、所定時間Tsごとに計算された巻取長さΔYLを巻始めから積算して、巻取ボビン6,7に巻き取った糸4の巻取長さYLを求める、巻取長さ演算手段75と、を備える。
(もっと読む)
1 - 14 / 14
[ Back to top ]