
Fターム[3F204FB03]の内容
クレーンの細部(制御、安全) (2,955) | 異常状態発生箇所;作動制限条件 (156) | 巻上装置;昇降装置 (23)
Fターム[3F204FB03]の下位に属するFターム
ワイヤロープ (6)
制動装置
Fターム[3F204FB03]に分類される特許
1 - 17 / 17
クレーンのウィンチ動作制御装置

【課題】電動機及び油圧モータを大型化することなく、クレーンのウィンチに高負荷が掛かるときにウィンチに高トルクを付与し、且つ、ウィンチに与えられるトルクに抜けが生じるのを防ぐ。
【解決手段】クレーンのウィンチ動作制御装置1では、制御機構14は、モーメントリミッタ12によって導出された吊荷用ウィンチ50に掛かるロープ張力が予め設定された設定値よりも大きい場合には、吊荷用ウィンチ電動機2と吊荷用ウィンチ油圧モータ8の両方から吊荷用ウィンチ50へ動力を供給させて吊荷用ウィンチ50を作動させ、モーメントリミッタ12によって導出されたロープ張力が前記設定値以下である場合には、吊荷用ウィンチ油圧モータ8から吊荷用ウィンチ50に動力を供給させず、吊荷用ウィンチ電動機2のみから吊荷用ウィンチ50へ動力を供給させて吊荷用ウィンチ50を作動させる。
(もっと読む)
ウインチ監視装置

【課題】オペレータの意図に反したロープの繰り出しの防止に資するウインチ監視装置を提供する。
【解決手段】ブレーキモードが中立フリーモードに設定されておらず、かつ、巻き上げ操作レバー13が操作されていない場合に、巻き取りドラム3が回転していることが検出されると、警報信号を出力するように構成した。この警報信号を利用してスピーカ31から音声にて巻き取りドラム3が回転している旨の報知を行うように構成することで、ブレーキ切換弁5のスプール位置の切り換え不良のような不具合が生じて巻き上げ操作レバー13を操作していないにもかかわらず荷の自重によって巻き取りドラム3が回転してしまう場合であっても、その旨を報知する警報を発することできる。
(もっと読む)
巻上機
【課題】簡単な構成で内蔵しているインバータが発する熱や回生制動用抵抗器が発する熱を効率良く外気に放熱でき、高頻度運転が可能な巻上機を提供すること。
【解決手段】荷昇降用電動機41、減速機構、回生制動用抵抗器70を具備し、荷昇降用電動機41を巻上機本体に内蔵するインバータ12で駆動すると共に、吊り荷の下降時荷昇降用電動機41で発電した電流を回生制動用抵抗器70に流し、回生制動をかける巻上機において、インバータ12を減速機構ケーシング15に面接触で密接させて取付け、該インバータ12で発生した熱を減速機構ケーシング15に放熱する。
(もっと読む)
天井クレーンの巻上駆動装置
【課題】複数台の電動機のうち一部が故障した場合非常運転を行える天井クレーンの巻上駆動装置を提供する。
【解決手段】レードルクレーンに備えている1台の巻上ドラム7に対して、複数台の高圧電動機6と、各複数台高圧電動機6に付設された同数台の高圧マトリクスコンバータ20からなる巻上駆動装置を備えており、高圧電動機6が、基底回転数以下の領域でトルクが一定値の定トルク領域と、基底回転数以上の領域であってトルクが回転数に反比例して低減する定出力領域とからなる特性を有するものであって、高圧マトリクスコンバータ20は、複数台の高圧電動機6で通常運転するときは、各高圧電動機6を定出力領域で運転させ、複数台より少ない台数の高圧電動機6で非常運転するときは、その高圧電動機6を基底回転数以上で通常運転の回転数より小さくかつ通常運転の半分でない回転数で運転させる。
(もっと読む)
リフト装置及びシステム
リフト・システム用リフト装置を開示する。本装置には、a)吊り上げ力を供給するためのモーター、b)積載装置をモーターに接続するべく、モーターに動作可能に接続された少なくとも一つのコネクタc)積載装置に関する負荷限界情報を受信する情報受信機、d)モーターおよび情報受信機に電気的に接続されたモーター・コントローラであって、情報受信機により受信された負荷限界情報に基づき、モーターの吊り上げ力を制限するモーター・コントローラ、が含まれる。 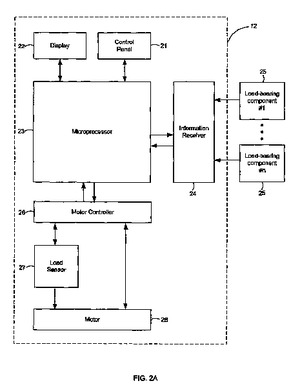 (もっと読む)
(もっと読む)
建設機械用メンテナンス情報管理装置及び建設機械用メンテナンス情報管理方法
【課題】建設機械の消耗品のメンテナンス時期を的確に把握できるようにする。
【解決手段】特定の作業の作業時に検出された前記消耗品の負荷を代表させる代表値を累積して記憶する記憶手段56と、記憶手段56に累積して記憶された負荷代表値に基づいて、当該消耗品のメンテナンス時期に関する情報を導出する導出手段59が含まれている。記憶手段56は、吊り作業又はブーム起伏作業によって負荷のかかる油圧ホース類の負荷代表値として、当該作業の作業半径と吊り荷重との積であるモーメントと作業時間とに基づくモーメント時間を累積して記憶する。
(もっと読む)
作業機の操作装置
【課題】十字型のジョイスティックを用いた操作装置において、容易且つ的確な複合操作を可能とし、安全性及び信頼性の高い作業を実現し得る作業機の操作装置を提供する。
【解決手段】十字型のジョイスティックを備えた作業機の操作装置において、上記ジョイスティックの可動範囲内に、該ジョイスティックの操作を固定できる操作固定位置を設定し、該操作固定位置への上記ジョイスティックの操作固定状態において作業機に対する特定の操作が実行されるように構成する。係る構成によれば、上記操作固定位置に上記ジョイスティックを固定することで、上記特定の操作を的確に且つ安定的に実行することができ、作業の安全性及び信頼性が向上する。
(もっと読む)
過負荷防止装置及び鍛造クレーンの過負荷防止方法、並びに、鍛造クレーン。
【課題】鍛造を行うワークを吊下げる際に、鍛造に伴ってワークから作用する荷重が過負荷となり、また、ロープがたるみ過ぎないように、ロープの張力が適切となるように調整してワークを吊下げることを可能とする鍛造クレーンの過負荷防止装置及び過負荷防止方法、並びに鍛造クレーンを提供するものである。
【解決手段】ワークWから作用する負荷が予め設定された許容範囲内となるように、吊下げ手段20によって保持部30を介してワークWを吊下げる際に変化する吊下げ特性値の大きさを制限する。
(もっと読む)
インバータ装置及び電動巻上機
【課題】電動巻上機の荷吊り状態でのインバータ完全停止を防ぎ応急的に動作させること容易にした回生回路故障保護方式を提供する。
【解決手段】交流を直流に変換する整流装置1と整流コンデンサ8、回生電力を熱エネルギーに変換する為の電力用半導体スイッチ2と回生抵抗器4、直流を交流に変換する周波数変換機9、回転する誘導電動機10に対し、電力用半導体スイッチ2を駆動する回生トリガ回路12とトリガ検出回路13と、電力用半導体スイッチ2の通電状態を検出する検出用抵抗器16と検出用フォトカプラ17、フォトカプラ17の出力信号を取込む電流検出回路14、トリガ検出回路13と電流検出回路14の2つの信号を取込む制御マイコン15、巻上機用インバータ装置の電源を通電・切断する電源開閉器11で構成され、電力半導体スイッチ2がショートモードで故障したときに電源開閉器11を開放する。
(もっと読む)
建設機械用メンテナンス情報管理装置及び建設機械用メンテナンス情報管理方法
【課題】建設機械の消耗品のメンテナンス時期を的確に把握できるようにする。
【解決手段】特定の作業の作業時に検出された前記消耗品の負荷を代表させる代表値を累積して記憶する記憶手段56と、記憶手段56に累積して記憶された負荷代表値に基づいて、当該消耗品のメンテナンス時期に関する情報を導出する導出手段59が含まれている。記憶手段56は、吊り作業又はブーム起伏作業によって負荷のかかる油圧ホース類の負荷代表値として、当該作業の作業半径と吊り荷重との積であるモーメントと作業時間とに基づくモーメント時間を累積して記憶する。
(もっと読む)
クレーンおよびクレーンの制御方法
【課題】 一部のモータ制御部が故障したとしても、クレーンの運転を継続することができるクレーンおよびクレーンの制御方法を提供する。
【解決手段】 複数の第1のモータ47A,47B,47C,47Dと、複数の第1のモータ47A,47B,47C,47Dに供給される電力をそれぞれ制御することにより、第1のモータ47A,47B,47C,47Dの出力をそれぞれ制御する複数の第1のモータ制御部59A,59B,59C,59Dと、第2のモータ75と、第2のモータ75に供給される電力を制御することにより、第2のモータ75の出力を制御する第2のモータ制御部87と、を備え、第2のモータ75には、一の第1のモータ制御部47Dから電力供給および停止が制御可能とされていることを特徴とする。
(もっと読む)
移動式クレーンのジブ着脱装置
【課題】 伸縮ブーム先端へのジブ装着時において、ジブチルトシリンダ63を縮小させる前にウインチを操作してジブ用ワイヤ45を繰り出しておかなかった場合には、ジブ用ワイヤ45を破断またはジブ着脱用シーブ55等を損傷する恐れがあった。
【解決手段】 ジブ本体先端を接地したまま前記ジブ起伏シリンダ63を伸縮動作することによりジブ基端下部連結部2を中心としてジブ基端上部連結部4がブーム先端上部連結部3に接近するようジブサポート62を回転させるにあたって、前記ジブ起伏シリンダ63の伸縮動作の前に前記ウインチに設けられたワイヤ繰出量検出手段17からのワイヤ繰出量が所定量以上検出されていないときは、前記ジブ起伏シリンダ63の伸縮動作が規制されるようにした。
(もっと読む)
スプレッダの衝突防止装置
【課題】2台のスプレッダを操作して、コンテナヤードに混在する40ft型コンテナと20ft型コンテナを同時に取り扱うという作業において、スプレッダによるコンテナの誤吊り上げや衝突事故を防止するとともに、作業の効率化を図る。
【解決手段】スプレッダの本体フレーム10の底面に、横行方向の中心軸上に所定の間隔をおいて第1超音波センサー群20と、走行方向の中心軸上に所定の間隔をおいて第2の超音波センサー群21とを配置して、第1超音波センサー群20の検出信号に応じてスプレッダの巻き下げ速度を制御し、第2超音波センサー群21の検出信号に応じてコンテナの種類を識別する。
(もっと読む)
クレーンの過負荷防止装置
【課題】フックロープのシーブへの巻き掛け数に対応した定格荷重特性に固定することができるクレーンの過負荷防止装置を提供する。
【解決手段】フックロープの第1の掛け数を設定する第1の掛け数設定器22Aと、前記第1の掛け数設定器22Aの第1の掛け数よりも少ない第2の掛け数を設定する第2の掛け数設定器22Cとを備えたクレーンの過負荷防止装置であって、前記第1の掛け数設定器22A及び第2の掛け数設定器22Cの各掛け数に対応した各定格荷重特性を記憶した記憶部20Aと、この記憶部20Aに記憶した特性に基づいて作業限界を演算する演算部20Bとを有する制御手段20と、前記制御手段20と前記第1の掛け数設定器22Cとの連通状態を固定するスイッチ23とを備えたことを特徴とする。
(もっと読む)
自走式作業機械の制御装置及びこれを備えた自走式作業機械
【課題】ウィンチドラムの状態が中立フリーモードに設定された状態で走行する場合であっても安全性を充分に確保すること。
【解決手段】所定の選択指令を受けることにより、ウィンチモータ17が停止しているときの前記ウィンチドラム7aの状態を、前記ウィンチドラム7aの回転が拘束される中立ブレーキモードと、ウィンチドラム7aの自由回転が許容される中立フリーモードとの間で切換えるモード切換手段39と、自走式クレーン1の運転状態が予め設定された走行認定条件を満たすときに前記選択指令にかかわらずウィンチドラム7aの状態を中立ブレーキモードに強制的に切換える強制モード切換手段40とを備えている。
(もっと読む)
リフト装置
【課題】 リフト装置のリモートコントロール等からの動作信号を検知し、誤動作であると判断したときは、動作を停止する。
【解決手段】 電源投入時には、制御装置6に接続された異常検出器18等から動作信号を検出すると、誤動作であると判断して、回路の動作を停止させ、動作中であれば、リモートコントロール2の動作信号と異常検出器18等からの動作信号にもとづいて誤動作を判断し、誤動作であれば回路の動作を停止させ、異常の通知をする。
(もっと読む)
クレーンの巻下げ衝突防止装置
【課題】 スタッキングガイドなどを使用することなく、隣に段積みされたコンテナなどの障害物がある場所に、コンテナとこれらの障害物との衝突を防止しながら、速やかにコンテナを目標位置に着床させること。
【解決手段】 第1の赤外線ビームセンサ11により、コンテナCの側面の延長線上近傍にある障害物を検出し、第2の赤外線ビームセンサ12により、コンテナCの側面の延長線上よりも外側にある障害物15を検出する。これにより、吊具45により把持されたコンテナCを下降させる際には、コンテナCの下端が、障害物に衝突することを防止することが可能となるとともに、吊具45などが傾いてワイヤ46に吊り下げられていた場合であっても、略鉛直方向下方にある障害物15を検出することが可能となる。これにより、例えば、吊具45やコンテナCが障害物15に衝突することを防止することが可能となる。
(もっと読む)
1 - 17 / 17
[ Back to top ]