
Fターム[3F303CB01]の内容
エレベーターの表示装置及び信号装置 (8,039) | 検出、推定、予測 (2,122) | カゴ位置検出 (414)
Fターム[3F303CB01]の下位に属するFターム
階床の検出 (36)
先行階位置(前進カゴ位置)の検出 (3)
着床位置、ドアゾーン等の検出 (62)
カゴの運転方向の検出 (12)
カゴ間隔の検出 (6)
位置検出方法(検出装置) (246)
Fターム[3F303CB01]に分類される特許
1 - 20 / 49
エレベータ
【課題】故障号機から出力されるかご位置パルスが異常である場合、故障号機のかごの正確な停止位置を取得できない。
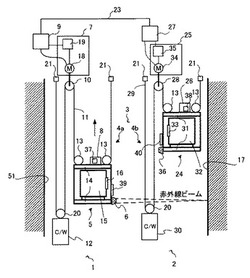
【解決手段】一実施形態によれば、かご5、24と、反射板39、40と、側壁面17、51に光軸を向けた光ビームを投光し、側壁面17、51及び反射板40、39により反射された光を受光する反射型のセンサ6、36と、センサ6、36をオンオフ駆動し、受信光の光量の変化及びこの受信光の入射角の変化を検知するセンサ制御回路37、38と、各かご5、24を昇降駆動し各かご位置信号を出力する巻上機7、28と、エレベータ号機1、2の運転制御を行い、かご24を被救出かごとし、かご5を救出かごとして救出運転を行う運転制御部9、27とを備え、運転制御部9はセンサ6から投射光ビームを出力させながらかご5を走行させ、センサ6が光量の変化及び入射角の変化を検知した位置でかご5を停止させるエレベータが提供される。
(もっと読む)
油圧式エレベータ

【課題】乗籠と昇降路との間以外の場所に設置され、乗籠が着床位置から外れたことを検出する移動感知装置を備える油圧式エレベータを提供する。
【解決手段】油圧式エレベータ1は、乗籠2とジャッキ32とロープ33とブラケット35と被検出部51と検出部52とを備える。乗籠2は、昇降路101内を第1のガイドレール21に沿って移動する。ジャッキ32は、作動油Lが供給されて伸びる。ブラケット35は、ジャッキ32の上端に取り付けられ、シーブ34を支持し、第2のガイドレール351に沿って移動する。被検出部51は、乗籠2が停止する着床位置P1に対応してブラケット35が停止する保持位置H1の近傍の第2のガイドレール351に取り付けられる。検出部52は、ブラケット35に取り付けられ、着床位置P1に対応する保持位置H1の被検出部51を検出する。
(もっと読む)
エレベーター巻上機用パルス検出装置
【課題】耐久性に優れたエレベーター巻上機のパルス検出装置を提供する。
【解決手段】回転するドラムと、ドラムに押し付けられ、ドラムの回転をパルス検出するためのゴムローラーと、ゴムローラーで検出したパルスに応じてエレベーターの位置検出情報を出力するエンコーダーとを備えて成るエレベーター巻上機用パルス検出装置であって、ゴムローラーのゴム部分は、エチレン・ポリプロピレン系ゴムで構成されている。
(もっと読む)
エレベータのかご上安全装置及び安全運転方法
【課題】作業員が乗かごの天井部上面へ乗り込んで作業を行なう場合における作業員の安全性を高めることである。
【解決手段】エレベータのかご上安全装置において、エレベータの乗かごの天井部上面に作用する荷重を検出する荷重センサと、荷重センサによる荷重の検出結果に応じて乗かごの運転モードを保守点検モードに切替える手段と、を備える。
(もっと読む)
電子安全エレベータ
【課題】エレベータシステムの高機能化に対応すると共に、安全コントローラを適切に配置可能とし、信頼性及び安全関連の保守を容易にする。
【解決手段】乗りかごの運行を制御するエレベータ制御システムに対して異常な運転を防止する電子安全エレベータにおいて、エレベータ制御システム3への電源供給及び遮断を制御する安全回路4と、エレベータ制御システム3によって制御され、乗りかごに制動を与えるブレーキ8と、を備え、安全回路4及びブレーキ8は、複数の安全機能を実現する安全コントローラ1によって安全機能毎に制御可能とされている。
(もっと読む)
エレベータの終端階検出装置
【課題】乗りかごが終端階に接近したことを確実に検出できるようにしつつその構造を簡単なものとしたエレベータの終端階検出装置を提供する。
【解決手段】昇降路の頂部および底部にそれぞれ固定されるとともに、その表面にそれぞれ異なる色彩の色彩部分11a,12aを有する少なくとも2つの被検出部材11,12と、色彩部分11a,12aの色彩を認識する、乗りかご2に設けられた色彩認識センサと20と、色彩認識センサ20が認識した色彩と被検出部材11,12の昇降路内における上下方向位置を判別する判別手段21とを備える。乗りかご2に設けるセンサは一つでよいから、従来の装置に比較してその構造が簡単であり、取付けや調整を容易に行うことができるばかりでなく、取り付けに必要なスペースもわずかで済む。
(もっと読む)
無線通信システムおよびそれを有するエレベータシステム
【課題】無線周波数(RF)信号から少なくとも実質的に遮蔽された閉鎖環境とこの閉鎖環境の外部との間にRFリンクを構成する無線通信システムを提供する。
【解決手段】この無線通信システムは、閉鎖環境の入口ポイントに設置される少なくとも1つのゲートウェイアンテナ12を含む。ゲートウェイアンテナ12は閉鎖環境内部へは下り回線RF信号を送信し、内部からは上り回線RF信号を受信する。無線通信システムはまた、前記閉鎖環境内部に設置される、少なくとも1つの補助リピータ14、およびドナーアンテナ16とサーバーアンテナ18を含む。ドナーアンテナ16とサーバーアンテナ18は補助リピータ14にカップリングされる。補助リピータ14は、ドナーアンテナ16およびサーバーアンテナ18を使用して下り回線RF信号および上り回線RF信号をリレーする。この無線通信システムを使ったエレベータシステム2も開示されている。
(もっと読む)
エレベータ救出システム
救出運転においてエレベータかごを降車位置まで移動させるエレベータ救出システムは、エレベータのブレーキ装置(4)に連結された救出装置(16)を備えており、救出装置(16)は、救出電源(22)を含むとともにエレベータのブレーキ装置(4)の近傍に配置されている。エレベータ救出システムは、さらに、手動の救出運転スイッチ(28)を含む操作パネル(26)と、救出装置(16)と操作パネル(26)との間の救出運転信号伝送路(32)と、を備えており、操作パネル(26)は救出装置(16)から遠隔に配置されている。 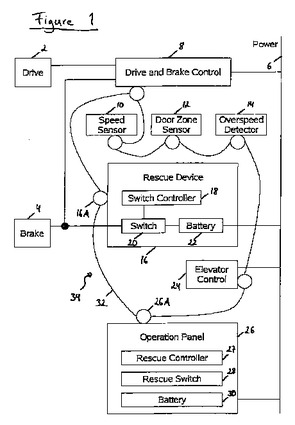 (もっと読む)
(もっと読む)
エレベーター装置
【課題】長距離検出が必要とされるエレベーターの昇降路(高階床)であっても、かごの異常速度に対して精度高く過速度を検出する。
【解決手段】昇降路1内のかご3の速度を検出し、検出されたかご3の速度が設定速度17を越えた場合、かご3を強制的に減速停止させるエレベーター装置において、昇降路1の頂部あるいは底部から予め設定した終端距離内にかご3があることを検出する範囲検出装置9,11と、かご3が終端距離内にある場合、昇降路1の頂部または下部からかご3までの距離を検出する終端距離検出装置10,12と、を備え、設定速度17は、終端距離検出装置10,12により検出された距離に応じて決定される。
(もっと読む)
エレベータ装置
【課題】外部への視界を妨げることなく、エレベータ昇降路の壁面部分を広告利用などの情報の発信場所として利用できるエレベータ装置を提供する。
【解決手段】乗り場側と対向する壁面31が透明な素材により形成されたエレベータ昇降路30の、前記透明な壁面31に、所定の情報を表示するための映像を投影する映像投影装置24を有する。この映像投影装置24は、エレベータかごが停止状態であることを条件に映像を透明な壁面31に投影し、外部に情報を発信する。
(もっと読む)
エレベータのロープ滑り検出装置及びそれを用いたエレベータ装置
【課題】ガバナ側に別途パルスエンコーダを設ける必要がなく、装置全体の構成に必要な部品点数が少なく構成が簡潔であって安価に得ることができるエレベータのロープ滑り検出装置を得る。
【解決手段】エレベータのロープ滑り検出装置において、エレベータの乗りかごと、乗りかごの昇降を駆動する駆動装置と、駆動装置の回転数を検出するパルスエンコーダと、乗りかごの走行条件を検出する走行条件検出手段と、乗りかごの走行時にパルスエンコーダから出力されるエンコーダパルスデータと走行条件検出手段から出力される走行条件データとを蓄積するデータ蓄積部と、走行条件が同一である前回の走行時におけるエンコーダパルスデータをデータ蓄積部から取得し、今回と前回のエンコーダパルスデータの差が基準値以上となっている場合にはトラクション能力が低下していると判断するデータ演算部と、を備える。
(もっと読む)
ロータリエンコーダおよび電子制御システム
【課題】ロータリエンコーダを組み込んだ電子制御システムでのさらなる安全性向上を図ること。
【解決手段】ロータリエンコーダ11と、駆動用モータ5を駆動制御する制御用CPUを内蔵した電子制御装置13と、を含み、ロータリエンコーダ11に、自己診断用CPU25を内蔵し、この自己診断用CPU25は、検出信号の状態からロータリエンコーダ11の状態を重大か軽微かの少なくとも2種類に区別し重大な状態であるときはフェイルセーフ信号を出力してシステム停止させ、軽微な状態であるときは制御用CPU39に異常予知信号を入力する構成。
(もっと読む)
電子制御システム
【課題】ロータリエンコーダを組み込んだ電子制御システムでのさらなる安全性向上を図ること。
【解決手段】ロータリエンコーダ11と、このロータリエンコーダ11の検出出力からモータ5を駆動制御する制御用CPU15を内蔵した電子制御装置13と、を含み、ロータリエンコーダ11に、当該ロータリエンコーダ自体の自己診断を実施する自己診断用CPU31を内蔵するとともに、この自己診断用CPU31に、上記制御用CPU15を監視する監視用CPUの機能を持たせた構成。
(もっと読む)
着床制御装置付きエレベーター
【課題】
より高行程,高速化されたエレベーターであっても、着床精度を向上することにある。
【解決手段】
昇降路内の複数の階床を移動する乗りかご1と、釣り合いおもり3と、この両者を移動させるためのメインロープ2と、メインロープ2に駆動力を伝える綱車4と、綱車4を駆動する駆動装置6と、駆動装置6を制御する制御装置10と、を有する着床制御装置付きエレベーターにおいて、メインロープ2の伸縮量を含めて乗りかご1の位置を検出し、着床予定階の位置と乗りかご位置との差により着床予定階までの走行残距離を求め、求めた値により駆動装置6を制御する。
(もっと読む)
循環式マルチカーエレベータ監視制御システム
【課題】循環式マルチカーエレベータを構成する各乗りかごの位置を、明確に表示することのできる循環式マルチカーエレベータ監視制御システムを提供する。
【解決手段】2本の昇降路6a,6bをその上端および下端で連結した循環式の昇降路と、該循環式の昇降路内にそれぞれが相互に連結されて配置された複数の乗りかご1〜5とを備えた少なくとも1つのマルチカーエレベータと、前記マルチカーエレベータを構成する各乗りかごの運行を制御する号機制御装置10〜16と、前記マルチカーエレベータの運行を制御するマルチカーエレベータ制御装置20,21と、前記マルチカーエレベータとの間で運行情報を送受信する運行情報処理部30と、前記送受信した運行情報を履歴として格納するデータ格納部40と、前記運行情報を表示する表示部50と、前記マルチカーエレベータ制御装置に対して運行を指令する信号を送信する運転指令制御部60を備え、前記表示部50は、前記相互に連結された乗りかごの階床位置を表示する。
(もっと読む)
エレベータ速度検出方法
【課題】
エレベータのかごの速度もしくは位置を、かごに取り付けたセンサを用いて検出する。
【解決手段】
磁気発生手段を外周に具備する回転体0101が、同じく磁気発生手段0103を具備するガイドレール0102と所定の空間距離を保持して対向する。前記回転体0101がかごと連動して昇降路内を移動する際、磁気力により転動する。前記転動運動は、ロータリーエンコーダ0104によりパルスに変換され、かごの速度若しくは位置の算出に利用する。
(もっと読む)
エレベータリモート点検システム
【課題】保守員の手間が少なくなり、点検時間が短縮されるエレベータリモート点検システムを提供する。
【解決手段】エレベータリモート点検システムは、予め点検対象の機器に付けられたカメラ位置決め用マークを含む比較用映像データと比較用映像データを撮影したときのかご位置が予め記憶され、点検対象の機器が指定されたとき点検対象の機器に対応するかご位置にかごが配車され、かご位置にかごが配車されたときに取り込まれた当該点検対象の機器の映像データのカメラ位置決め用マークが当該点検機器の比較用映像データのカメラ位置決め用マークと重なるカメラワークの条件が求められ、取り込まれた映像データの当該点検機器のカメラ位置決め用マークが当該点検機器の比較用映像データのカメラ位置決め用マークと重なったときに取り込まれた映像データを遠隔端末に送られる。
(もっと読む)
ビルの監視システム
【課題】多数の建物及びエレベータに取付けられた振動センサの振動データを収集し解析し、ユーザその他の公共機関で必要とする情報を作成し提供することにある。
【解決手段】建物1の各エレベータ2の乗りかご7に設置される振動センサ10と、この振動センサ10から出力される振動信号を受信するビル監視装置20とを備え、このビル監視装置20は、振動センサ10からの振動データを収集し蓄積する実績データ蓄積手段22aと、この蓄積された時系列的な振動の加速度データからエレベータの位置情報を求めて、この情報と振動のデータの対のデータ群を統計解析するデータ解析手段22bと、この解析データから乗りかご7の正常運転時の正常振動と乗りかごを含むエレベータの故障・異常振動とに分離する正常・異常振動分離手段22cとを設け、建物の建築ユーザ等に故障・異常状態を提供可能とするビルの監視システムである。
(もっと読む)
エレベータケージの位置を検出するシステムおよび方法
【課題】ベルトの振動によって損なわれない、または僅かしか損なわれないエレベータケージの位置検出のためのシステムおよび方法を提供すること。
【解決手段】エレベータケージ(1)の位置を検出するためのシステムはケージが懸架されるベルト(2)とベルトの位置を検出するための検出器を含み、ベルトは第1側(2.1)に検出器の歯車(3A)が機械的に確実に係合する歯列(10)を有する。
(もっと読む)
移動体の位置表示装置
【課題】平均化したタイミングで指針駆動用パルスを発生する専用の制御部を有していなくても、指針の動きが円滑な移動体の位置表示装置の提供。
【解決手段】移動体2の位置を指針11の指し示す位置により表示する移動体の位置表示装置1において、入力される上記移動体の位置に関する位置パルスデータに一次遅れ演算を施して位置信号を発生するフィルタ手段21と、上記位置信号を順次取り込み、上記移動体の移動に対応する指針駆動信号を生成する指針駆動信号生成手段22と、上記指針駆動信号に基づいて上記指針を動かすモータ17を制御する駆動手段26と、を備える。
(もっと読む)
1 - 20 / 49
[ Back to top ]