
Fターム[3G005GA00]の内容
過給機 (28,580) | 制御対象 (1,356)
Fターム[3G005GA00]の下位に属するFターム
可動部材(可撓壁を含む) (1,250)
ポンプ(過給用を除く) (13)
過給機用クラッチ (58)
過給機用変速装置 (23)
Fターム[3G005GA00]に分類される特許
1 - 12 / 12
ハイブリッドシステムの制御装置
【課題】電動モータと、過給機及びインタークーラを備えるエンジンと、を備え、電動モータとエンジンとの少なくとも何れかの動力によりハイブリッド車両を駆動するハイブリッドシステムの制御装置において、ハイブリッドシステムの冷間始動時に電動モータ系統を早期に暖機できる技術を提供する。
【解決手段】インタークーラ及び電動モータ冷却系統用ラジエータは、導入される外気の流通経路の上流側からインタークーラ、電動モータ冷却系統用ラジエータの順に配置されるか、あるいは少なくとも互いの一部が接するように配置されるか、の少なくとも何れか一方となるように配置されており、ハイブリッドシステムの冷間始動時において、過給機による過給圧が所定の目標過給圧以上となるようにエンジンのエンジン負荷を制御して過給空気を昇温する暖機手段を、更に備えることを特徴とする。
(もっと読む)
内燃機関用過給システム

【課題】補助空気を供給する場合に、ターボチャージャーの安定性を向上させる。
【解決手段】内燃機関用過給システムは、タービン(11)を備える過給器と、タービンに補助空気を供給する蓄圧タンク(21)と、蓄圧タンクよりタービンへ供給される補助空気の流量を調整する調整手段(25)と、タービンの回転数が第1目標回転数のN倍(但し、0<N<1)である初期目標回転数になるまで、補助空気の流量が最大流量となるように調整手段を制御する第1制御手段(30)と、タービンの回転数が第1目標回転数を超えた後、タービンの回転数が、第1目標回転数以下且つ初期目標回転数以上の値を有していると共に所定時間の経過後に第1目標回転数に収束する目標関数にて示される第2目標回転数になるように、調整手段を制御する第2制御手段(30)と備える。
(もっと読む)
過給機付き内燃機関の制御装置
【課題】過給機の動力をアシストする動力アシスト装置を備えた内燃機関において、運転者の加速要求を適正に反映して動力アシスト装置による動力アシストを行い、ひいては内燃機関のトルク制御を好適に実施することのできる過給機付き内燃機関の制御装置を提供する。
【解決手段】目標トルク算出部71において、基準トルク算出部71aは、アシスト無目標トルクTr_non及び最大アシストトルクTr_maxを算出する。加速要求算出部71bは、アクセル開度APの微分値dAP/dtに応じて加速要求係数αを算出し、ピークホールド部71cは、その最大値を保持して最大加速要求係数α_peakとして出力する。目標トルク演算部71dは、アシスト無目標トルクTr_nonと最大アシスト目標トルクTr_maxとのトルク差ΔTr及び最大加速要求係数α_peakを基に、目標トルクTr_tを算出する。
(もっと読む)
ターボチャージャ制御装置
【課題】 触媒コンバータの暖機効率を向上させることができるターボチャージャ制御装置を提供する。
【解決手段】 触媒コンバータ5の暖機必要時に、ターボチャージャECU20及びクラッチコントローラ24がターボチャージャ2の電磁クラッチ2Dを遮断操作してタービン2Aとコンプレッサ2Bとを遮断状態にする。したがって、コンプレッサ2Bが非駆動状態となって吸入管4の吸入空気量が減少し、これに伴い排気管3の排気量が減少して排気熱エネルギが増大する。また、タービン2Aがコンプレッサ2Bを駆動しない状態となり、タービン2Aによる排気熱エネルギの消費が抑制される。
(もっと読む)
内燃機関の制御装置
【課題】過給器をアシストするアシスト機構を効率的且つ安全に作動させる。
【解決手段】エンジンシステム10において、エンジン200はMAT209を備える。またECU100は、MAT209におけるモータ209cの作動範囲を制限するためのモータ作動許可範囲設定処理を実行する。係る処理において、ECU100は、例えば10分と規定される部分時間領域毎にターボ回転センサ210の出力値たるタービン209aの回転数Ntの最高値を特定し、相互に連続する3個の部分時間領域からなる最大で30分の時間領域について、これら最高値からモータ209cの作動許可最高回転数Ntmaxを特定する。また、部分時間領域を規定する10分が経過する毎に、時間領域を構成する個々の部分時間領域のうち最古のものに関するデータを破棄し、作動許可最高回転数Ntmaxを適宜更新する。
(もっと読む)
内燃機関の制御装置
【課題】過給器の運転時に電動機を適切に運転する内燃機関の制御装置を提供することを目的とする。
【解決手段】過給器を備えた内燃機関の制御装置であって、多相コイルを備えて、前記過給器の運転を補助する電動機と、前記電動機を構成する回転子の磁極の位相を検出する位相検出手段と、前記電動機の各相コイルに現れる電流波形の性状に影響を与える物理量として、該電動機の電源電圧を検出する検出手段と、前記検出した位相に基づいて、前記電動機の各相コイルへの通電を開始して、前記電動機を駆動する駆動手段と、前記内燃機関の運転要求に応じた前記過給器の運転の際、前記検出された電源電圧に応じて前記通電の位相を調整するよう前記駆動手段を制御する制御手段とを備えた内燃機関の制御装置とする。
(もっと読む)
過給機付き内燃機関の制御装置
【課題】排気動力により過給を行う過給機と排気動力以外を動力源とする補助過給装置とを備えた内燃機関において、補助過給装置を過不足無く適正に制御し、ひいては高精度な過給圧制御を実現する。
【解決手段】トルクベース制御部70では、アクセル開度とエンジン回転速度とに基づいて目標トルクを算出し、更にその目標トルクに基づいて燃料噴射量の算出、目標過給圧の算出を実施する。また、アシスト制御部80では、トルクベース制御部70で算出した目標過給圧と、目標トルクから算出した目標空気量とに基づいて目標コンプレッサ動力を算出すると共に、排気情報に基づいて実コンプレッサ動力を算出する。そして、目標コンプレッサ動力と実コンプレッサ動力との動力差に基づいて、ターボチャージャ上流側に設けた補助コンプレッサのアシスト動力を算出する。
(もっと読む)
内燃機関の排気浄化装置
【課題】 DPFの過昇温のおそれがある時に、燃費やドライバビリティの悪化を伴わずに排気流量の増加を実施でき、実施可能な運転領域が制限されないようにする。
【解決手段】 ECU8は、排気通路3に設置したDPF42の状態と排気の状態を監視し、運転条件等の変化で排気流量が減少しDPF42の温度が過度に上昇するおそれがあると判断すると、電動ターボチャージャ5による過給圧を増加すると同時にEGR弁62を全開側に制御する。すると過給された空気が吸気通路2からEGR通路61を介して排気通路3へ導入し排気流量が増加するので、DPF42の温度が低下して過昇温を防止する。
(もっと読む)
エンジンの過給装置
【課題】 電動過給機11を用いて過給圧のフィードバック制御を行う場合に、エンジン4に吸入される空気流量に関係なく、目標過給圧に到達するまでの応答時間を出来る限り短くするとともに、オーバーシュートの発生を出来る限り抑制する。
【解決手段】 実過給圧が目標過給圧となるように、該実過給圧と目標過給圧との偏差に基づいて所定のフィードバックゲインで電動過給機11の回転駆動制御を行うとともに、エンジン4に吸入される空気流量が多いほど上記フィードバックゲインを大きく設定する。また、目標過給圧が高いほど上記フィードバックゲインを小さく設定する。
(もっと読む)
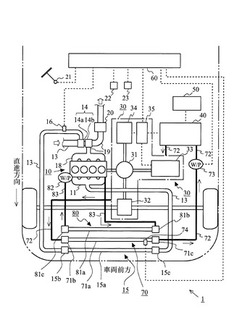
ハイブリッド車両における排気浄化装置
【課題】ハイブリッド車両における排気浄化装置において、未浄化NOxや還元剤の流出を防止して吸蔵したNOx触媒の還元効率を向上することで排気浄化効率の向上を図る。
【解決手段】排気管46に排気ガス中のNOxを吸蔵して還元可能な第1触媒51及び第2触媒52からなる排気浄化装置50を設けると共に、各触媒51,52に還元剤としての燃料を供給する燃料添加弁61を設け、DE11を停止したMG12,13によるEV走行時に、燃料添加弁61から排気ポート33に燃料が噴射されたとき、低圧EGR弁59を開放すると共にシャッタバルブ68を閉止した状態で、電動アシストターボ過給機を駆動し、第1触媒51及び第2触媒52から流出したNOx及び燃料を低圧EGR通路58を通して吸気管37に戻し、この第1触媒51及び第2触媒52に循環させる。
(もっと読む)
過給機付き内燃機関
【課題】本発明は、コストを抑えて排気ガスを効果的に浄化できる過給機付き内燃機関を提供する。
【解決手段】エンジン10は、第一過給機としての電動過給機24と、第二過給機としての排気タービン過給機40と、2次空気供給手段50と、触媒33とを備える。電動過給機24は、燃焼室12に連通する吸気通路21に設けられ、吸入した空気を燃焼室12へ過給する。排気タービン過給機40は、吸気通路21において、電動過給機24に対し直列に設けられ、吸入した空気を燃焼室12へ過給する。2次空気供給手段50は、電動過給機24によって圧縮された空気を、燃焼室12に連通する排気通路31に供給する。触媒33は、排気通路31に設けられ、排気ガスを浄化する。
(もっと読む)
電気支援型のターボチャージャ用のコンプレッサ・サージ保護装置
電気支援型ターボチャージャにおけるコンプレッササージを防止/制御するシステムは、ターボチャージャ軸の周りに配された電動機(18)を有するターボチャージャ(10)を備える。電動機コントローラ(30)は電動機に結合され、電動機がターボチャージャ軸に与える回転運動を制御する。メモリはコントローラに結合され、コンプレッササージ条件の多次元マップを格納する。センサ(32)は、格納されたマップ・データと比較されるエンジン及び/又はターボチャージャの動作情報を与える。センサはコントローラに結合される。コントローラは、センサの提供する実際の動作情報を、格納されたマップにプロットして、ターボチャージャが異なる動作領域で動作しているかを評価する。プロットされたターボチャージャの動作がサージ危険性又はサージ状態の領域内にある場合、コントローラは電動機を制御して、ターボチャージャ軸の回転速度を低減する。 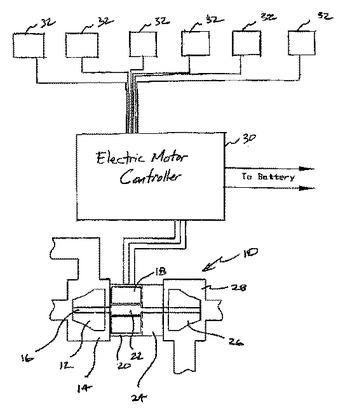 (もっと読む)
(もっと読む)
1 - 12 / 12
[ Back to top ]