
Fターム[3G093AA01]の内容
車両用機関又は特定用途機関の制御 (95,902) | 機関の用途 (9,333) | 車両用 (7,853)
Fターム[3G093AA01]の下位に属するFターム
自動二輪車 (178)
四輪駆動車 (76)
変速機付 (2,719)
車両が電動機によっても駆動されるもの (3,262)
作業用、産業用、荷役用 (684)
Fターム[3G093AA01]に分類される特許
921 - 934 / 934
自動車の車輪へ加えられるトルクの制御装置及び制御方法
本発明は、自動車の車輪へ加えるトルクの設定値信号を発生することが可能な自動車の動力装置の制御装置に関する。この制御装置は、音響的な観点から有害な、動力装置の熱エンジンの回転数の変化を減少させることに適した、動力装置の中に組み込まれた熱エンジンの回転数の変化の制限を表す信号の発生手段(1)と、回転数の変化の制限を表す信号による、最適動作範囲の中における動力装置の動作点の決定手段(2)を含む。動力装置の中に組み込まれた熱エンジンの回転数の変化の制限を表す信号の発生手段は、入力として、自動車の特性を表すパラメータと、運転者の意志を表すパレメータを受ける。 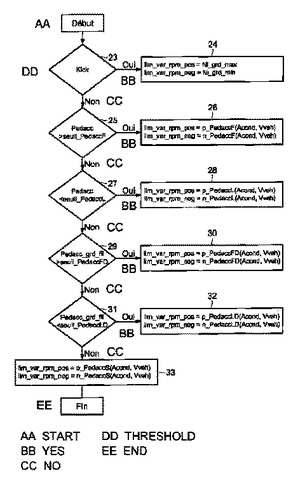 (もっと読む)
(もっと読む)
自動車の自動的縦制御方法および装置
間隔センサを有する、自動車の自動的な縦制御装置および方法が提案され、間隔センサは少なくとも、前を走行する車両に対する自己の、追従する車両の間隔および/または追従する車両に関する相対速度を測定する。測定値から、検出された、前を走行する車両が停止したかが定められるので、追従する車両は前を走行する車両の後方のある距離に停止される。前を走行する車両が再び始動したことが認識された場合には、追従する車両の運転者は始動操作装置を操作しなければならず、その場合に始動操作装置はブレーキペダルである。 (もっと読む)
連結車両の制御システム

本発明は、牽引車両及びトレーラーから構成される連結車両の制御システム(7)に関する。このトレーラーは、台枠を積み込み輸送しかつ積み降ろすようになっており、この台枠は支持具の上に載せることができ、この台枠の上にペイロードが搭載される。この制御システムにおいて、径路を計算する径路コンピュータ(8)が設けられ、この径路コンピュータは、台枠(4)を積み込むためにトレーラーを後ろ向きに台枠の下に導く径路を計算する。
第1の入力装置(10)が設けられ、それによって、台枠の実際の位置及び実際の方位が径路コンピュータ(8)に入力されることが可能であれば、そしてまた、第2の入力装置(11)が設けられ、それによって、トレーラーの実際の位置及び実際の方位が径路コンピュータ(8)に入力されことが可能であれば、特に信頼性の高いシステムが得られる。この場合、径路コンピュータ(8)は、台枠の実際の位置及び実際の方位から、トレーラーに対する参照位置及び参照方位、すなわちトレーラーが台枠を積み込むために台枠の下に位置する位置及び方位を計算するように構成され、かつ、径路コンピュータ(8)は、トレーラーの位置及び方位の実際値と参照値とから、トレーラーを後ろ向きに台枠の下に導く径路を計算するように構成される。
(もっと読む)
高周波ノイズ除去装置及びそれを用いたエンジン用点火装置
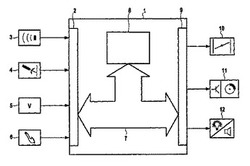
本発明の高周波ノイズ除去装置5は、フェライトコア1と、前記フェライトコアに対向された1対の導電体2a,2bとを有し、前記1対の導電体2a,2bは互いに電気的に絶縁されており、前記1対の導電体の各他端がノイズ除去対象物に並列に接続されるこ
とを特徴とする。また、フェライトコア1は筒状であることが好ましい。更に1対の導電体2a,2bはフェライトコア2の外周面及び中心穴内周面を通って軸心方向に巻回されたものでも良いし、一方が前記フェライトコア1の外周面に他方が前記フェライトコア1の中心穴内周面に対向されていても良い。
(もっと読む)
内燃機関を自動的にスタートおよびストップさせる方法
本発明は、内燃機関を自動的にスタートおよびストップさせる方法に関する。内燃機関(1)に関するストップモードの解放が、自動車の内室(9)の温度と、ドライバによって所望される目標温度との温度差に依存する期間に依存して行われる。 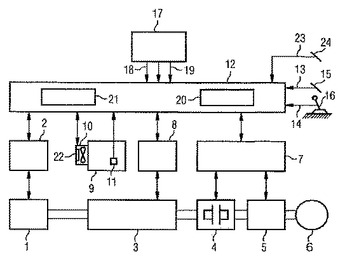 (もっと読む)
(もっと読む)
車間距離制御を行う方法及び装置
本発明は、車間距離制御を行う方法及び装置に関し、これによれば、前記車両と前方走行車両との間の距離を表す距離変数の実際値(dact)が測定される。さらに、距離変数のための複数の重み付け値(gi)が、車両の運転状況及び/又は車両の周囲状況及び/又は運転者の運転動作を表す入力変数(xi)に従って決定され、前記重み付け値(gi)が、第1の計算ステップで論理的に結合されて、距離変数のための論理結合値(f)を形成する。距離変数のための設定値(dsetp)が論理結合値(f)から決定され、車両の制動手段及び/又は駆動手段が、距離変数の測定実際値(dact)が決定設定値(dsetp)をとるよう起動される。第1の計算ステップの後に第2の計算ステップが続き、ここで、論理結合値(f)が、予め定義された値の範囲に限定され、距離変数の設定値(dsetp)が、適宜限定される論理結合値(f)から決定される。 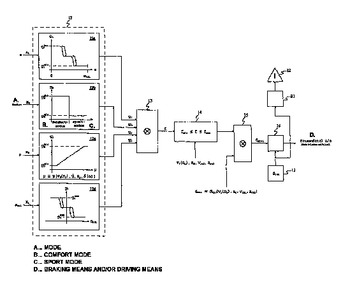 (もっと読む)
(もっと読む)
自動車用運転支援システム
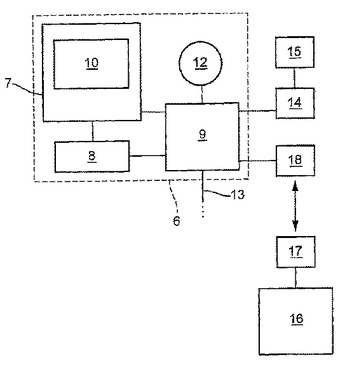
本発明は、少なくとも1つの駆動ユニットと、1つのステアリング装置と、1つのブレーキ装置とを有する、電子制御式駆動伝達系を備えた、自動車、特に多用途車に関する。自動車の運転を簡素化するために、表示装置(7)と、入力装置(8)と、制御システム(9)とを備えた運転支援システム(6)が設けられる。表示装置(7)は、車両の実際の向き及び実際の位置、及び車両の比較的近い周囲状況を、モニタ(10)に表示するよう適合される。入力装置(8)は、車両の所望の向き及び所望の位置を入力するよう適合される。制御システム(9)は、運転アルゴリズム(12)を処理するように適合され、駆動伝達系を作動させて、車両の周囲状況を考慮しつつ、車両をその実際の向き及び実際の位置からその所望の向き及び所望の位置に移動する。
 (もっと読む)
(もっと読む)
自動車における自動変速機の運転方法
本発明は、惰走運転段階中に、設定限界速度に到達するまで、例えば自動変速機にクラッチを介して結合し得る駆動エンジンの制動作用を利用するための変速機ダウンシフトが、クラッチの係合によって終了される、自動車における自動変速機の運転方法に関する。惰走運転段階の終了後における車両駆動装置の自発行動性を改善するために、本発明に基づいて、設定限界速度以下では、ダウンシフトがクラッチ解除状態で終了されるようにすることを提案する。 (もっと読む)
車両のエンジンの始動方法
【課題】 停止中の車両が始動過程において意に反して動き出すことがないことを保証する、車両のエンジンの始動方法を提供する。
【解決手段】 車両(1)のエンジン(5)の始動方法において、始動希望がある場合、車両(1)が停止しているかどうかが検査され、車両(1)が停止している場合、少なくとも1つの車両ブレーキ(10)が作動される。車両ブレーキ(10)の作動後に、エンジン(5)の始動が開始される。
(もっと読む)
エンジンブレーキ運転における内燃機関を運転するための方法および装置
以下のステップ:すなわち、
内燃機関10の開始回転数の超過を含む予め規定された開始条件が満たされた場合に、内燃機関10の出力調整部材18;28;30に対する制御信号の監視を開始し、開始後、
内燃機関10の出力調整部材18;28;30に対する制御信号を閾値と比較し、制御信号が閾値を上回った場合に欠陥反応をトリガして、エンジンブレーキ運転における内燃機関10を運転するための方法が提案される。この方法は、開始回転数を、制御信号の形成へのアイドリング運転調整部50の介入の関数として変化させることによって特徴付けられている。さらに、このような方法を制御する制御装置20が提案される。  (もっと読む)
(もっと読む)
車間距離制御装置
【課題】先行車に対する車間距離制御を行う車間距離制御装置において、先行車の発進に追従して発進した際に不必要な自動減速が行われるのを防止してスムーズな発進を可能にする。
【解決手段】所定時間判定手段M9が、セットスイッチ17あるいはリジュームスイッチ18が操作されて自車が車間距離制御を開始してから所定時間内にあると判定し、かつ接近状態判定手段M8が、先行車との車間距離が車頭時間および自車の車速に基づいて設定した目標車間距離未満であると判定すると、目標車間距離設定手段M4が前記目標車間距離を車間距離検出手段M2で検出した実際の車間距離に変更するので、自車が先行車に続いて発進して車間距離制御を開始した直後に、目標車間距離と実際の車間距離との差が大きいために自動減速が行われるのを防止し、発進後のスムーズな加速を可能にしてドライバーの違和感を解消することができる。
(もっと読む)
車間距離制御装置
【課題】 車間時間または車間距離をステップ状に切り換えた時の車速変化を緩やかにする。
【解決手段】 車間時間がステップ状に切り換えられた時に、車間時間を所定の変化速度で変化させて目標車間時間T*を生成し、目標車間時間T*と車速検出値とに応じた目標車間距離を設定し、車間距離検出値が目標車間距離に一致するように車両の駆動力と制動力を制御する。これにより、車間時間をステップ状に切り換えた時の車速変化が緩やかになり、乗り心地をよくすることができる。
(もっと読む)
先行車追従装置
【課題】 先行車追従制御を解除したときに無用な接近警報が発せられるのを防止する。
【解決手段】 先行車追従制御の解除操作がなされても、所定の追従制御終了条件を満たすまで先行車追従制御を継続する。
(もっと読む)
自動車の走行制御装置
【課題】自車が先行車に追従して第1目標車速付近で走行するときに車体の前後方向の加減速を頻繁に受けず、乗り心地を向上できる。
【解決手段】定速走行用車速設定部27により設定される自車の第1目標車速と車間距離用車速設定部28により設定される自車の第2目標車速とを比較して低い方の車速が自車の最終目標車速とするように制御される。第1目標車速V1から減速して所定の目標車間距離になるように自車の最終目標車速を第2目標車速に切換えるときに、V1からV1−αまでの範囲では、現時の自車の最終目標車速を切換えないように制御される。また第2目標車速から加速して上記第1目標車速になるように自車の最終目標車速を切換えるときに、V1からV1+αまでの範囲では、現時の自車の最終目標車速を切換えないように制御される。
(もっと読む)
921 - 934 / 934
[ Back to top ]