
Fターム[3G093CB04]の内容
車両用機関又は特定用途機関の制御 (95,902) | 制御・作動条件(機関以外) (4,250) | 過渡時 (2,646)
Fターム[3G093CB04]の下位に属するFターム
Fターム[3G093CB04]に分類される特許
1 - 20 / 201
ハイブリッド自動車
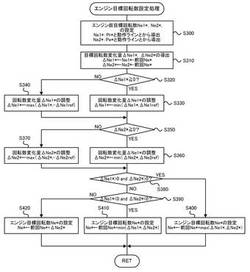
【課題】エンジン回転数のハンチングをより抑制しつつ急激な要求トルクの変化に対するエンジン回転数の追従性を確保する。
【解決手段】第1エンジン仮目標回転数Ne1*と、第2エンジン仮目標回転数Ne2*とが、エンジン目標回転数Ne*の変化方向が共に同じ方向になるような目標回転数である場合(S380又はS390でYES)には、前回Ne*と、第1上限値Ne1refを超えないように調整(S320〜S370)された目標回転数変化量ΔNe1*,ΔNe2*のうち絶対値の大きい方の値と、を加えた値をエンジン目標回転数Ne*に設定する(S400,S410)。それ以外の場合(S390でNO)には、前回Ne*と、第2上限値Ne2ref(<第1上限値Ne1ref)を超えないように調整(S350〜S370)された目標回転数変化量ΔNe2*と、を加えた値をエンジン目標回転数Ne*に設定する(S400,S410)。
(もっと読む)
ハイブリッド車両

【課題】車両の状態に応じて生じる動力性能の向上や振動及び騒音の低減等の課題を適切に解決することが可能なハイブリッド車両を提供する。
【解決手段】キャリアCに内燃機関10が、サンギアSに第1MG11が、リングギアRに出力部14がそれぞれ接続された遊星歯車機構15を含む動力分割機構13と、出力部14に動力を出力できる第2MG12とを備えたハイブリッド車両1において、内燃機関10の回転を変速してキャリアCに伝達できる変速機15をさらに備え、車両1の状態が特定状態のときにキャリアCの目標回転数範囲と内燃機関10の目標回転数とが設定され、目標回転数が目標回転数範囲外の場合には内燃機関10の回転数が目標回転数になり、かつキャリアCの回転数が目標回転数範囲内の回転数になるように変速機15が制御される。
(もっと読む)
噛み合いクラッチシステムの制御装置
【課題】噛み合い歯として矩形歯を用いた噛み合いクラッチにおいて、噛み合い歯同士を正確に噛み合わせ、一対の係合要素を正確に係合させる。
【解決手段】軸線方向と交わる方向へ相対回転可能に構成され、各々の対向面に、前記軸線回りに周状に配列し且つ対向面が平坦な複数の矩形状の噛み合い歯が形成されてなる一対の係合要素を備えた噛み合いクラッチを備えた噛み合いクラッチシステムを制御する装置(100)は、一対の係合要素の差回転速度を検出する検出手段と、一対の係合要素が噛み合い歯同士が対向面で接触した接触状態にあるか否かを判定する判定手段と、一対の係合要素が接触状態にあると判定され、検出された差回転速度が所定値未満である場合に、差回転速度を増加させる第1の制御手段とを具備する。
(もっと読む)
車両の制御装置
【課題】車両の制御装置において、製造コストの増加や車両重量の増加を招くことなく車両における直進走行性の向上を可能とする。
【解決手段】ヨーレイトセンサ11が検出したヨーレイトに基づいてピーク周波数を特定するヨーレイトピーク周波数特定部21と、事前にベンチテストで求めた車両感度とピーク周波数に対応するヨーレイトと車速とに基づいて前後輪側に作用するヨーレイトの位相の偏差を算出するヨーレイト前後位相差算出部23と、ヨーレイト前後位相差が180度に近づくような目標車速を設定する目標車速算出部24とを設ける。
(もっと読む)
ハイブリッド車両の加速ペダル制御方法
【課題】ハイブリッド車両の駆動状態が電気モータからエンジンに転換されるかあるいはエンジンから電気モータに転換される場合、運転者がこれを容易に認知できるハイブリッド車両の加速ペダル制御方法を提供する。
【解決手段】ハイブリッド車両の駆動モード転換状態を判断する判断ステップと、判断ステップにおいて、駆動モードが転換されたものと判断されれば、加速ペダルに異質操作感を付与する異質操作感付与ステップとを含み、異質操作感は、加速ペダルの操作踏力が増大される踏力モードと、加速ペダルに振動が付与される振動モード、および加速ペダルにチックが付与されるチックモードからなり、加速ペダルに接触するか衝撃を加える加速ペダルに隣接して設けられた作動ロッドと、作動ロッドを加速ペダル側に前進あるいは後退させるアクチュエータによって実現されることを特徴とする。
(もっと読む)
作業機
【課題】作業の途中でアイドリングストップ機能が発揮されてエンジンが停止しない作業機を提供することである。
【解決手段】作業機1は、エンジン529と、各種作業を行うための作業部(例えば、クレーン55)と、を有し、一定の期間ユーザから作業部を駆動するための操作入力が無い場合に、エンジンを停止するアイドリングストップ機能を有し、アイドリングストップ機能が作業部の状態によって制限される。
(もっと読む)
自動車等の走行制御装置
【課題】 自動車のアクセル装置とブレーキの踏み間違いが多発しており、それを他の弊害を生じることなく、取付が容易で、かつ安価に達成できる自動車の制御装置が望まれていた。
【解決手段】 アクセル装置の踏込み角度に応じ、弾性反発手段による踏込み力の急激な増加を体感させることによる第1の警告認知手段と、音、光、振動等による警告装置による第2の警告認知手段と、エンジン停止スイッチによる第3の警告認知・停止手段とを設けた自動車の制御装置を提供する。又、アクセルペダルの上面に、簡単に取付けることが出来る。特にヒューズ型回路接続チップを適用することで回路接続が極めて容易となったことである。
(もっと読む)
ハイブリッド車両の制御装置
【課題】駆動力伝達系負荷が大きいときに実行されるモータスリップ走行制御時にモータトルクの低減を図ること。
【解決手段】ハイブリッド車両の制御装置は、エンジンEと、モータジェネレータMGと、第1クラッチCL1と、第2クラッチCL2と、路面勾配推定演算部201と、MWSC+CL1スリップ制御処理部(図7のステップS9)と、を備える。モータジェネレータMGは、車両の駆動力を出力すると共にエンジンEの始動を行う。第1クラッチCL1は、エンジンEとモータジェネレータMGとを断接する。第2クラッチCL2は、モータジェネレータMGと左右後輪RL,RRとを断接する。MWSC+CL1スリップ制御処理部は、駆動力伝達系負荷が所定値以上のとき、エンジンEを所定回転数で作動させたまま第1クラッチCL1をスリップ締結し、モータジェネレータMGを所定回転数よりも低い回転数として第2クラッチCL2をスリップ締結する。
(もっと読む)
車載内燃機関の自動停止始動装置
【課題】機関運転を停止させておく期間を確保して燃料消費量の抑制を図る一方で、登坂路における機関運転再開時にも安定した再始動を実現することのできる車載内燃機関の自動停止始動装置を提供する。
【解決手段】本発明の車載内燃機関の自動停止始動装置である電子制御装置100は、停止条件が成立したときに機関運転を停止させる一方、クラッチ21の継合によって終了する一連の発進操作に含まれる所定の操作が実行されたことを条件に内燃機関10を再始動させる自動停止始動制御を実行する。電子制御装置100は、再始動の条件となる所定の操作を路面の上り勾配の大きさに応じて変更し、路面の上り勾配が大きいときほど一連の発進操作におけるより早い段階において実行される操作を前記所定の操作として設定する一方、路面の上り勾配が小さいときほど一連の発進操作におけるより遅い段階において実行される操作を前記所定の操作として設定する。
(もっと読む)
排熱回収システムを搭載した船舶の推進方法及び船舶
【課題】船内負荷の急減時に対して船速の変動を応答良く抑制することができる排熱回収システムを搭載した船舶の推進方法及びその推進方法が用いられる船舶を提供する。
【解決手段】内燃機関の出力によりプロペラを回転させる工程と、内燃機関から発生する排ガスによって電力を生成する工程と、電力を生成する工程により生じた余剰電力により電動機を駆動させることでプロペラの回転をアシストする工程と、を備えた船舶の推進方法であって、目標プロペラ回転数と実プロペラ回転数の偏差を基準燃料噴射量に換算する工程と、機関回転数、および電動機の出力から演算された機関出力に基づき、内燃機関への燃料噴射量の補正値を演算する工程26と、基準燃料噴射量から前記補正値を減算することで内燃機関に供給すべき補正燃料噴射量を算出する工程21bと、を備えたことを特徴とする。
(もっと読む)
エンジン停止制御装置
【課題】ブレーキの操作の検出により車両が駐車操作中又は渋滞中であることを判定し、駐車操作中又は渋滞中であるときにはエンジンの停止が発生しないようにする。
【解決手段】過去の一定時間Tの間においてブレーキペダルの踏まれた回数Mを求める(ステップS11)。この回数Mによりブレーキの操作が行われた頻度がわかる。回数Mがしきい値Nを超えるときは(ステップS12のY)、駐車操作中フラグを“1”とする(ステップS17)。これはドライバーが駐車の操作を実行中である(又は、渋滞中である)ことを示している。この場合は、アイドリングストップ禁止フラグを“1”に設定し(ステップS18)、アイドリングストップの実行を禁止する。
(もっと読む)
内燃機関自動停止再始動制御装置
【課題】内燃機関の基準信号の誤認識を防止し、内燃機関の良好な再始動性を確保することできる内燃機関自動停止再始動制御装置を提供する。
【解決手段】
この発明による内燃機関自動停止再始動制御装置は、内燃機関の自動停止後に於ける惰性回転中に、内燃機関を始動させる始動装置のソレノイドを駆動してピニオンギアを軸方向へ移動させてリングギアへの押し付けを開始し、押し付けの開始後、所定期間を経過するまではクランク角度信号による基準信号の検出を禁止して内燃機関の基準信号の誤認識を防止し、内燃機関の良好な再始動性を確保するようにしたものである。
(もっと読む)
ハイブリッド車両のエンジン停止制御装置
【課題】エンジンを始動性の良好なクランク角で停止させ得るようにし、その制御中も、モータ/ジェネレータによる回生エネルギーの吸収が可能となるようにする。
【解決手段】アクセル開度APOの図示する低下に呼応してt2〜t3間におけるようにエンジンを停止させる(Ne=0となす)に際し、第1クラッチ(CL1)の締結状態保持と、第2クラッチ(CL2)のスリップ締結状態とで、エンジン停止クランク角をエンジン始動性に優れたクランク角となすのに必要な目標モータ回転数tNmにモータ/ジェネレータの回転数Nmが追従するようモータ/ジェネレータを回転数制御する。よって、エンジン停止クランク角が始動性に優れたクランク角になるのを保証し得て、エンジン始動性の安定化を実現可能である。また、このエンジン停止クランク角制御中に第2クラッチ(CL2)をスリップ締結状態にしておくため、この間もモータ/ジェネレータによる回生制動を行い得て、エネルギー回収効率を高めることができる。
(もっと読む)
作業機械のエンジン制御装置およびそのエンジン制御方法
【課題】発電機の発電オン/オフによる発電機出力が不連続に変動してもエンジン回転数の変動を抑えること。
【解決手段】発電機が用いられる作業機械の運転状態を検出する検出手段と、前記運転状態をもとに、発電機の発電がオフの場合に設定されるエンジン目標回転数とオンの場合に設定されるエンジン目標回転数とを同一の目標マッチング回転数npa’とするエンジン目標回転数設定手段と、発電機の発電がオフの場合に最大限出力することができる発電オフ時のエンジン目標出力ELaを演算し、発電機の発電がオンとなる場合に、前記エンジン目標出力に発電機による発電量相当の発電出力Pmを加えたエンジン目標出力ELbを演算するエンジン目標出力演算手段と、を備える。
(もっと読む)
作業機械のエンジン制御装置およびそのエンジン制御方法
【課題】燃費およびポンプ効率の向上を図りつつ、発電機によるエンジンのアシスト作用によって作業機の応答性を十分に確保すること。
【解決手段】目標マッチング回転数np1と現在のエンジン回転数nとの偏差Δnが所定値以上となった場合にアシストが必要であると判定し、アシストが必要であると判定された時点t1後、所定期間T1の間、目標アシスト回転数ANを、目標マッチング回転数np1よりも大きい高回転目標マッチング回転数nANに設定し、その後漸次目標マッチング回転数np1に近づく目標アシスト回転数ANに設定し、エンジン回転数nが目標アシスト回転数ANとなるようにエンジンの出力をアシストする発電機にアシストトルク指令値を出力してエンジン回転数nを制御する。
(もっと読む)
作業機のエンジン制御装置
【課題】エンジンの作動を停止させたのち、車体が急発進したりエンストを起す等の不利のない状態でエンジンを始動させることが可能となる作業機のエンジン制御装置を提供する。
【解決手段】キースイッチ以外の他の操作具の操作に基づいてエンジンの作動を停止させるエンジン自動停止処理、及び、エンジンの作動を停止させたのちにエンジンを始動させるエンジン自動始動処理を実行する制御手段Hが備えられ、制御手段Hが、他の操作具によるエンジン停止用操作が開始され且つ設定時間以上継続して行われたことが検出されると、エンジン自動停止処理を実行するように構成され、エンジン自動停止処理を実行したのちにおいて、走行停止操作検出手段STにて機体走行停止操作が行われたことが検出されると、エンジン自動始動処理を実行する。
(もっと読む)
ハイブリッド車両
【課題】空燃比センサの異常判定を行う。
【解決手段】
気体燃料が供給されるエンジン6と、エンジン6によって駆動されて発電を行うジェネレータ7と、ジェネレータ7での発電電力を蓄電するバッテリ9と、バッテリ9とジェネレータ7との少なくとも一方から電力を受けて駆動される走行用モータ4とを備えている。ジェネレータ7の出力と気体燃料の消費量とから決定される実際の燃費率を、目標燃費率と比較することにより、前記空燃比センサの異常判定が行われる。空燃比センサが異常と判定されたときは、空燃比センサの出力特性を補正したり、エンジン回転数の増減補正等が行われる。
(もっと読む)
車両用モータ駆動装置および自動車
【課題】2ウェイローラクラッチを用いた車両用モータ駆動装置において、アクセルペダルを踏み込んだ状態からアクセルペダルを戻し、その後、再びアクセルペダルを踏み込んだときの振動・異音を防止する。
【解決手段】電動モータ3の回転が入力される入力軸7と、入力軸7に設けられた1速入力ギヤ9Aおよび2速入力ギヤ9Bと、1速入力ギヤ9Aおよび2速入力ギヤ9Bにそれぞれ噛合する1速出力ギヤ10Aおよび2速出力ギヤ10Bと、1速の2ウェイローラクラッチ16Aと、2速の2ウェイローラクラッチ16Bと、電動モータ3のモータトルク制御装置59とを設け、モータトルク制御装置59は、アクセルペダル61が踏み込まれていないときに現変速段の2ウェイローラクラッチ16Aを係合位置に保持するトルクを電動モータ3で発生する制御を実行する。
(もっと読む)
作業機械のエンジン制御
【課題】負荷解除時においてエンジンの調速制御の遅れによる過剰な燃料の噴射を防止するエンジン制御装置を提供すること。
【解決手段】
エンジンの目標回転数と実回転数の回転偏差を算出するメインコントローラと、エンジンの実回転数と制御目標エンジンの実回転数と回転数偏差が大きくなれば、その偏差量に応じて上記ポンプ容量制御手段を駆動し、可変容量型油圧ポンプの吐出流量を減少させて、馬力制限制御を行ういわゆるスピードセンシング制御機構とを備え、メインコントローラは、操作量検出手段で検出した操作レバーの操作量に基づきアクチュエータの要求流量を演算するとともに、検出したポンプ吐出圧力とアクチュエータ要求流量とによりポンプ吸収トルクを演算し、演算したポンプ吸収トルクの予測値が目標とするトルク以下になった場合に、エンジンの燃料噴射量を減量側に調整することを特徴とするエンジン制御装置である。
(もっと読む)
車載内燃機関の制御装置
【課題】燃料カット処理に際し車両回転振動系の共振現象に起因する車両振動の発生を抑制することのできる内燃機関の制御装置を提供する。
【解決手段】内燃機関10の制御装置60は、燃料カット処理に際し、全気筒運転状態及び全気筒休止状態のうち一方から燃料供給気筒数を徐々に変化させて他方にまで移行させる。制御装置60は、内燃機関10から変速機20を介して駆動輪50に至る車両回転振動系の振動振幅が小さくなるように、その移行に要する過渡期間を変速機20の変速比に基づいて設定する。
(もっと読む)
1 - 20 / 201
[ Back to top ]