
Fターム[3G093CB06]の内容
車両用機関又は特定用途機関の制御 (95,902) | 制御・作動条件(機関以外) (4,250) | 過渡時 (2,646) | 加速時 (537)
Fターム[3G093CB06]に分類される特許
1 - 20 / 537
ハイブリッド電気自動車の制御装置
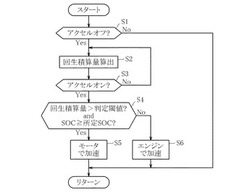
【課題】車両発進時の負荷が大きい場合にも不要な電力消費を排除し、バッテリのSOCの低下を抑制することのできるハイブリッド電気自動車の制御装置を提供すること。
【解決手段】駆動源としてエンジン及びモータを選択可能なハイブリッド電気自動車において、統合ECU22はアクセルオフ時にモータ4による回生積算量を算出し(S1、S2)、アクセルの踏み込みが検出されたときには(S3)、当該回生積算量が判定閾値より大であり且つバッテリ18のSOCが所定SOC以上であるか否かを判別し(S4)、真(Yes)である場合はモータ4での加速を選択し(S6)、偽(No)である場合にはエンジン2による加速を選択する。
(もっと読む)
運転支援装置

【課題】
車両運転者に優良運転の継続による利益、また不良運転継続による損失を車両運転者に伝達し、車両運行技術の向上を促進させることができる運転支援装置を提供する。
【解決手段】
車両情報取得手段10は車両情報を取得し、運行指標生成手段21は車両情報より車両の運行状態を示す運行指標Dを生成し、運行評価生成手段22は車両情報より車両の運行状態を複数段階の評価レベルE1で評価し、車両情報積算値生成手段23は車両の状態が所定の評価レベルE1内に入ってから他の評価レベルE1に移行するまでの間の車両情報に関連する車両情報積算値Fを生成する。
(もっと読む)
車両用出力制御装置
【課題】アクセル操作及びブレーキ操作が同時に行なわれた場合に、ドライバの意図を反映させた適切な出力抑制制御を行う車両用出力制御装置を提供する。
【解決手段】車両用出力制御装置1を、車両の走行用動力の出力調整操作が入力されるアクセル操作部と、ブレーキ装置の制動操作が入力されるブレーキ操作部と、アクセル操作部の操作量を検出するアクセル操作量検出手段20と、ブレーキ操作部の操作力を推定するブレーキ操作力推定手段と、アクセル操作部の操作量が所定のアクセル閾値以上でありかつブレーキ操作部の推定操作力が所定のブレーキ閾値以上である状態が所定時間以上継続した場合に、走行用動力の出力をアクセル操作部の状態に関わらず抑制する出力抑制制御手段10とを備える構成とする。
(もっと読む)
車両用制御装置
【課題】原動機の断続運転による低燃費走行中にその断続運転に起因する比較的長周期の振動や騒音を有効に低減できる車両用制御装置を提供する。
【解決手段】原動機が少なくとも電動機で構成されている車両に装備され、要求出力が所定変動幅内に保持されていることを条件に、原動機の断続運転を実行して、車両の加速走行と惰性走行とを交互に実行させる車両用制御装置であって、断続運転のための原動機の出力変動に伴う特定の振動の周波数が車両の共振周波数域内に入るか否かを判定する共振判定部(ステップS14の機能)と、その判定の結果、出力変動の周波数が共振周波数域内に入ることを条件に、特定の振動の周波数が車両の共振周波数域から外れるように断続運転の条件を通常とは異なる条件に変更する断続運転条件変更部(ステップS16の機能)と、を備えている。
(もっと読む)
内燃機関の制御装置
【課題】内燃機関の制御装置において、運転者が意図的に選択して緩加速を行うことができるようにし、また、緩加速制御を行っている間においてアクセルペダル等の操作量の正確さに神経質を使う必要をなくして運転者への負担を軽減し、さらに、道路事情に合わせて選択させて利便性を高くし、しかも、廉価とすることにある。
【解決手段】車両(1)には、車両加速中の加速度が所定の緩やかな加速度となる緩加速制御の作動と禁止を任意に選択する緩加速制御作動選択手段(18)を設ける。制御手段(14)は、車速が停車とみなせる速度且つ緩加速制御の作動が緩加速制御作動選択手段(18)で選択されている場合であって、ブレーキペダル(9)の操作がなくてアクセルペダル(8)の操作がある場合に、スロットルバルブ(10)の開度が速度制限用開度に一致するように電子スロットル装置(11)を作動制御する。
(もっと読む)
ハイブリッド自動車
【課題】車両の加速性能を十分に発揮させる。
【解決手段】バッテリの放電パワーPbがバッテリの出力制限Wout未満で且つモータMG2が最大トルクライン上の動作点で駆動しているときには(S330,S340)、エンジンの目標回転数Ne*を所定回転数N1だけ減少させて目標回転数Ne*を再設定すると共に再設定した目標回転数Ne*をパワー用動作ライン上で実現するためのトルクを目標トルクTe*に再設定する(S350,S360)。これにより、エンジンから駆動軸に直接伝達されるトルク(直達トルク)を増加させることができ、直達トルクとモータMG2の最大トルクとの和のトルクにより駆動軸に要求される要求トルクTr*に対応することができる。この結果、車両の加速性能を十分に発揮させることができる。
(もっと読む)
車両の制御装置
【課題】エンジン出力での走行中にドライバの加速要求に基づく目標駆動トルクが増加した場合、モータ走行時と同等の応答性を持ってドライバの要求する目標駆動トルクを実現できる車両の制御装置を提供する。
【解決手段】エンジン1で出力するエンジントルクTeを車両Mの駆動輪5を駆動する駆動トルクTvと発電機2、3を稼働する稼働トルクTgとに分配する車両の制御装置29において、ドライバの要求に基づく目標の駆動トルクTdを増加させる場合、エンジントルクTeモードライバの要求前のエンジントルクに維持しつつ稼動トルクTgの分配比率を減少させることを特徴とする車両の制御装置。
(もっと読む)
始動発電機の制御装置
【課題】エンジン10の始動に際しての初期回転の付与手段として発電機(始動発電機40)を併用するに際し、始動発電機40によって生成可能なトルクが小さいために、エンジン10の始動性等が低下すること。
【解決手段】リレー48は、バッテリ46の正極端子を、インバータINVの正極側入力端子と始動発電機40の中性点Nとのいずれかに選択的に接続する。エンジン10の始動に際しては、バッテリ46の正極を中性点Nに接続してインバータINVの入力電圧を昇圧し、インバータINVの入力電圧がバッテリ46の端子電圧Vbであるときよりも生成可能なトルクを増大させる。これにより、始動性を向上させたり、燃料カット制御からの復帰回転速度を低下させて燃費を改善したりすることができる。
(もっと読む)
車両の制御装置
【課題】エンジン出力での走行中にドライバの加速要求に基づく目標駆動トルクが増加した場合、モータ走行時と同等の応答性を持ってドライバの要求する目標駆動トルクを実現できるハイブリッド車両のトルク制御装置を提供する。
【解決手段】 エンジン1で出力するエンジントルクTeを車両Mの駆動輪5を駆動する駆動トルクTvと発電機2、3を稼働する稼働トルクTgとに分配する車両の制御装置29において、ドライバの要求に基づく目標の駆動トルクTdを増加させる場合、エンジントルクTeをドライバの要求前のエンジントルクに維持しつつ稼動トルクTgの分配比率を減少させることを特徴とする車両の制御装置。
(もっと読む)
ハイブリッド車両の制御装置
【課題】減速要求中、エンジン回転数の低下を遅らせることで再加速要求への移行に備えること。
【解決手段】ハイブリッド車両の制御装置は、エンジンEngと、ベルト式無段変速機構3と、ローブレーキL/B又はハイクラッチH/Cと、モータ・ジェネレータM/Gと、左右駆動タイヤLT,RTと、統合コントローラ59と、を備える。ローブレーキL/B又はハイクラッチH/Cは、ベルト式無段変速機構3の下流側の位置に配置され、開放することにより動力伝達を遮断する。モータ・ジェネレータM/Gは、ローブレーキL/B又はハイクラッチH/Cの下流側の位置に配置され、駆動・回生に用いられる。統合コントローラ59は、エンジンEngへの燃料噴射を停止する減速要求時、ローブレーキL/B又はハイクラッチH/Cを開放した後、ベルト式無段変速機構3の変速比をロー側へ変速する減速時制御を行う。
(もっと読む)
走行制御装置
【課題】ドライバがアクセルペダルを踏み間違えた場合に、意図していない加速を防止するとともに、踏み間違いではなく、真にドライバが加速の意思を持つ場合は、確実に車両を加速させる走行制御装置を提供する。
【解決手段】入力された自車両情報又は外界認識情報に基づいて、加速要求装置の踏み間違いをしたか否かを判断する踏み間違い判断手段と、踏み間違い判断手段にて踏み間違いと判断された場合、一定の踏み込み量で一定の加速要求装置の反力となる第1のモードから、加速要求装置の反力がその一定の反力よりも小さい反力となる第2のモード、又は、加速要求装置の反力及び開度を固定にする第3のモードに変更するモード変更手段と、減速要求が入力された場合、変更された第2のモード又は第3のモードから第1のモードに変更するモード解除手段と、を有する。
(もっと読む)
自動クラッチ制御装置およびその変速制御方法
【課題】運転者がアクセルを踏込んだ速度に応じて設定される目標クラッチトルクでクラッチを制御することにより運転者の要求する加速の実現が可能である変速機の自動クラッチ制御装置およびその変速制御方法を提供する。
【解決手段】クラッチ40と、目標クラッチトルク演算部3aと、変速制御部3cと、アクセル踏込速度検出部2aと、原動機回転数検出部2cと、入力軸回転数検出部3dと、アクセル踏込速度Vacが1つ以上の所定の踏込速度閾値を超えるか否かを判定する踏込速度閾値判定部3eと、いずれかの踏込速度閾値を超えた場合に入力軸と原動機4とを切離後、成立された低速ギヤ段によって増加している入力軸回転数に一致させるよう原動機回転数Neを増加制御する原動機回転数増加制御部3fと、目標クラッチトルクTcaをアクセル踏込速度Vacの大きさに応じて変更演算する目標クラッチトルク変更演算部3gと、を備える。
(もっと読む)
車両駆動装置
【課題】車両のアクセルペダル解放が行われた場合のフュエルカット後のフュエルリカバリによるショックを解消する。
【解決手段】車両が走行中にアクセルペダルから足が離れた場合に、ロックアップクラッチを解放する。同時に燃料噴射タイミングのリタードを行った後、フュエルカットを実行する。一方、フュエルカットの実行により、ロックアップクラッチの解放完了直後にフュエルリカバリが行われることが予測される場合には、フュエルカットの実行を抑制する。
(もっと読む)
車両用ファン装置
【課題】エンジンを冷却するためのファンを駆動することによって得られる制動力を増大させた車両用ファン装置を提供する。
【解決手段】エンジン11の出力軸11aにファンクラッチ13を介して連結されて、エンジン11へ向かう空気流を形成するファン14と、車両に搭載された補助ブレーキが作動状態にあるときに、ファン14が出力軸11aに連結され続けるようにファンクラッチ13を制御する制御装置20と、を備え、さらにエンジン11に対するファン14の反対側に該エンジン11を覆うように配置される開閉機構16を備える。開閉機構16は、ファン14が形成する空気流15の通過を許容する開状態と、ファン14が形成する空気流15の通過を遮断する閉状態とに制御装置20によって切り替えられ、制御装置20は、補助ブレーキが作動状態にあるときに開閉機構16を閉状態に制御する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】トラクション制御中における駆動電力の応答性を高める。
【解決手段】エンジン3に駆動される発電機5と、車両を駆動する駆動モータ11とを備える、ハイブリッド車両の発電制御装置において、車輪13のスリップに応じたモータトルク指令値制御を検出するトラクション制御検出手段1と、前記トルク指令値に応じた目標駆動電力から、発電電力を演算する要求発電電力演算手段1と、要求発電電力のための、発電機回転速度指令値とエンジントルク指令値からなる運転点又は発電機トルク指令値とエンジン回転速度指令値からなる運転点を演算する運転点演算手段1と、運転点から発電機及びエンジンを制御する制御手段1と、実際の発電電力とモータの実際の駆動電力が一致するようにトルクを制御する駆動モータ制御手段1,2,4と、を有し、トラクション制御中に、燃費を優先した運転点に代えて、発電機の回転速度変化量が所定値以下である運転点に設定する。
(もっと読む)
車両の省燃費運転評価装置及び省燃費運転評価方法
【課題】 他車両への載せ換えが容易であると共に、簡易な構造のエコドライブ車載機器を用い、車種や走行条件の相違に応じて、省燃費運転の実施状況を定量的かつ統一的に評価する。
【解決手段】 少なくとも車両速度及びエンジン回転数と、車両諸元とに基づいて運転状況及び積荷状況を分析し、運転状況及び積荷状況の分析結果を用いて、最適なシフトアップ方法、最適な加速方法、最適な減速方法、最適な経済速度からなる理想的な省燃費運転モデルを、発進から停車に至るまでの1区間の移動距離毎に生成し、エンジン燃費マップと分析された運転状況及び積荷状況に基づいて評価対象燃費を算出する共に、理想的な省燃費運転モデルと分析された運転状況及び積荷状況に基づいて理想燃費を算出し、評価対象燃費と理想燃費とを比較して、省燃費運転達成率を算出する。
(もっと読む)
ハイブリッド電気自動車の制御装置
【課題】前駆動トルクの応答性を確保しつつ燃費の抑制を図る上で有利なハイブリッド電気自動車の制御装置を提供する。
【解決手段】モータのコイル温度が閾値温度Tr以下である場合は、アクセルペダルの踏み込み速度Vapsが閾値速度Vr以上であると判定された時点で、エンジン22を早期に始動させる。抑制電流に発電機24で発電された発電電流が早期に加算されてフロントモータ18に供給されるため、指示トルクAに対してフロントモータ18で発生する駆動トルクBの時間遅れが最小限に抑制される。モータのコイル温度が閾値温度Trを上回る場合は、高圧バッテリー12から流れる電池電流が予め定められた閾値電流Ir以上であると判定された時点で、エンジン22を始動させる。不必要に早期にエンジン22を始動させることがない。
(もっと読む)
自動車用駆動システム
【課題】回生運転時の燃料消費の向上を図りつつ内燃機関の再始動時のレスポンスの向上を図る。
【解決手段】エンジンENGと、トランスミッションTMと、ワンウェイ・クラッチOWCと、ワンウェイ・クラッチからの出力を駆動車輪2に伝えるデフケース(被回転駆動部材)11と、エンジンの出力軸をモータリングすることができるように接続された第1のモータジェネレータMG1と、デフケースに接続された第2のモータジェネレータMG2と、第2のモータジェネレータが回生運転を行っている際にエンジンへの燃料カットを実施しつつ第1のモータジェネレータよりエンジンをモータリングする車両制御手段50と、を備える。
(もっと読む)
ハイブリッド車両の制御装置
【課題】モータの駆動のみによる走行中に駆動軸に作用するトルクが負トルクから正トルクに反転する際、その反転と内燃機関の始動開始とが重なることを抑制できるハイブリッド車両の制御装置を提供する。
【解決手段】第2モータジェネレータ5の駆動のみによるハイブリッド車両の走行中における高車速領域では、内燃機関1を始動開始するか否かの判断に用いられる閾値が、内燃機関1の燃費改善を意図した値よりも大きい値に変更される。このため、第2モータジェネレータ5の駆動のみによる走行中のハイブリッド車両が減速状態から加速されるとき、要求される走行パワーの増大に伴い第2モータジェネレータ5の出力トルクが増大して駆動軸3に作用するトルクが反転する際、上記走行パワーが閾値以上になりにくくなり、ひいては停止状態にある内燃機関1の始動が生じにくくなる。
(もっと読む)
車両制御装置
【課題】シフトアップ直前の高回転域においても加速の伸びを運転者が楽しむことができるようにする。
【解決手段】コントローラ10は、シフトアップ操作が行われたエンジン回転速度を記憶し、記憶されたエンジン回転速度からシフトアップ操作が最も行われたエンジン回転速度を検索し、同一アクセル開度で加速した場合にシフトアップ操作が最も行われた回転速度までエンジントルクがエンジン回転速度の増加に伴い増加するようにエンジントルクを調整する。
(もっと読む)
1 - 20 / 537
[ Back to top ]