
Fターム[3G093DB02]の内容
車両用機関又は特定用途機関の制御 (95,902) | パラメータ、検出(機関以外) (18,896) | 回転数(回転速度) (1,537) | 車輪の回転数(回転速度) (711)
Fターム[3G093DB02]の下位に属するFターム
駆動輪の回転数(回転速度) (236)
従動輪の回転数(回転速度) (138)
Fターム[3G093DB02]に分類される特許
1 - 20 / 337
車両のエンジン自動制御装置
車両のエンジン自動停止制御装置
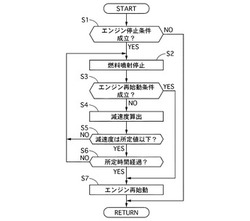
【課題】 緩減速走行時にドライバがハンドル操作を行ったときのバッテリ電圧の低下を抑制できる車両のエンジン自動停止制御装置を提供する。
【解決手段】 走行中に所定条件が成立した場合、エンジンを停止するステップS2(コーストストップ制御手段)と、車両の減速度を検出するステップS4(減速度検出手段)と、減速度が所定値以下である場合、ステップS2(コーストストップ制御手段)によるエンジンの停止時間を制限するステップS7(エンジン停止時間制限手段)と、を備えた。
(もっと読む)
走行制御装置、及び移動体の走行制御方法

【課題】走行制限が解除された際の急加速を防止した安全な運転を行うこと
【解決手段】車両1は、アンテナ2を介して走行制限信号を受信する。走行制限信号は、走行制限エリアでの移動体の制限速度を含む。走行制御ECU5は、走行制限エリアでの車両速度を制限速度以下となるように制御する。走行制御ECU5は、アンテナ2を介して走行制限エリアでの走行制限の解除を指示する走行制限解除信号を受信する。走行制御ECU5は、当該受信の際に制限速度を超える加速操作を運転者が行っていた場合、車両1の停止制御を行う。
(もっと読む)
車両用制御装置
【課題】原動機の断続運転による低燃費走行中にその断続運転に起因する比較的長周期の振動や騒音を有効に低減できる車両用制御装置を提供する。
【解決手段】原動機が少なくとも電動機で構成されている車両に装備され、要求出力が所定変動幅内に保持されていることを条件に、原動機の断続運転を実行して、車両の加速走行と惰性走行とを交互に実行させる車両用制御装置であって、断続運転のための原動機の出力変動に伴う特定の振動の周波数が車両の共振周波数域内に入るか否かを判定する共振判定部(ステップS14の機能)と、その判定の結果、出力変動の周波数が共振周波数域内に入ることを条件に、特定の振動の周波数が車両の共振周波数域から外れるように断続運転の条件を通常とは異なる条件に変更する断続運転条件変更部(ステップS16の機能)と、を備えている。
(もっと読む)
車両制御装置及び車両システム
【課題】ドライバがパニック状態に陥ったままブレーキペダルと間違えてアクセルペダルを踏んでしまっても、駆動力を安全な領域で制御できるようにする。
【解決手段】入力された自車速情報から自車両が停止状態に遷移して良いか否かを判定する停止状態判定手段と、停止状態判定手段で停止状態に遷移しない場合、入力された自車速情報とクリープ走行情報とからクリープ走行状態に遷移して良いか否かを判定するクリープ走行判定手段と、クリープ走行判定手段でクリープ走行状態に遷移しない場合、入力された自車速情報とクリープ走行情報とアクセルペダル踏込情報から通常走行状態に遷移して良いか否かを判定する通常走行判定手段と、停止状態判定手段とクリープ走行判定手段と通常走行判定手段で判定された走行状態に基づいて、要求駆動力の算出処理方法を切り替え、要求駆動力を算出する要求駆動力算出手段と、を有する。
(もっと読む)
車両制御装置
【課題】非線形特性を有する制御対象の振動に対しても、制御系設計を容易にし、かつ、制振効果を発揮することができる車両制御装置を提供する。
【解決手段】制御対象における運動または変形の動特性を模擬するモデル要素を含み、入力操作量の推定値および制御対象に入力される外乱入力の推定値の少なくとも一方に基づく制御対象のヒステリシス特性を模擬するとともに、制御対象の運動状態の制御目標指標を定義する動特性記述手段27と、動特性記述手段27において定義した制御目標指標のうちのヒステリシス特性に関与する制御目標指標が、所望の状態となるように入力操作量を調整する操作補正量を算出する補正値演算手段28と、補正値演算手段28により算出された操作補正量を用いて、入力操作量を補正した操作量指令値を制御対象に出力する入力操作量指令出力手段29と、が設けられていることを特徴とする。
(もっと読む)
車両の制御装置
【課題】エンジンのアイドリングストップを行う車両の坂路発進性をより好適に確保することのできる車両の制御装置を提供する。
【解決手段】エンジンのアイドリングストップに応じて行われるヒルホールド制御を、アイドリングストップからの復帰のためのエンジンの再始動指令がなされ(S101:YES)、かつエンジン回転速度が既定の判定値α以上である(S102:YES)ことを条件に解除する(S104)一方で、そうした条件が成立しても、エンジンがアイドリングストップによる停止の途上にあるときには(S103:YES)、ヒルホールド制御を解除しないようにした。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジンとモータを走行用動力源として有するハイブリッド車両において、簡素的な制御ロジックを用いて車両姿勢安定制御とスリップ率制御とを両立させる。
【解決手段】本発明に係るハイブリッド車両(1)の制御装置(14)は、車両姿勢を安定化する車両姿勢安定制御を実施する車両姿勢安定制御手段と、モータ(3)に駆動トルク又は回生トルクを付与してスリップ率制御を実施するスリップ率制御手段と、車両姿勢安定制御の実施時にモータの出力トルクを第1のモータトルクT1以下に制限し、車両姿勢安定制御の実施中に更にスリップ率制御を実施する場合、モータの出力トルクの制限を第2のモータトルクT2に変更するモータトルク制御手段とを備えたことを特徴とする。
(もっと読む)
ハイブリッド車両の制御装置
【課題】トラクション制御中における駆動電力の応答性を高める。
【解決手段】エンジン3に駆動される発電機5と、車両を駆動する駆動モータ11とを備える、ハイブリッド車両の発電制御装置において、車輪13のスリップに応じたモータトルク指令値制御を検出するトラクション制御検出手段1と、前記トルク指令値に応じた目標駆動電力から、発電電力を演算する要求発電電力演算手段1と、要求発電電力のための、発電機回転速度指令値とエンジントルク指令値からなる運転点又は発電機トルク指令値とエンジン回転速度指令値からなる運転点を演算する運転点演算手段1と、運転点から発電機及びエンジンを制御する制御手段1と、実際の発電電力とモータの実際の駆動電力が一致するようにトルクを制御する駆動モータ制御手段1,2,4と、を有し、トラクション制御中に、燃費を優先した運転点に代えて、発電機の回転速度変化量が所定値以下である運転点に設定する。
(もっと読む)
自動車用駆動システム
【課題】回生運転時の燃料消費の向上を図りつつ内燃機関の再始動時のレスポンスの向上を図る。
【解決手段】エンジンENGと、トランスミッションTMと、ワンウェイ・クラッチOWCと、ワンウェイ・クラッチからの出力を駆動車輪2に伝えるデフケース(被回転駆動部材)11と、エンジンの出力軸をモータリングすることができるように接続された第1のモータジェネレータMG1と、デフケースに接続された第2のモータジェネレータMG2と、第2のモータジェネレータが回生運転を行っている際にエンジンへの燃料カットを実施しつつ第1のモータジェネレータよりエンジンをモータリングする車両制御手段50と、を備える。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジン及びモータからの動力によって走行するハイブリッド車両において、ABS制御やスリップ率制御などの車両安定制御を安定的に実施可能なハイブリッド車両の制御装置を提供する。
【解決手段】本発明に係るハイブリッド車両の制御装置(18)は、スリップ状態にあるか否かを判定する駆動輪状態判定手段(22)と、スリップ状態と判定時にエンジン(2)及びモータ(4)の少なくとも一方の運転状態を制御することでスリップ状態から回復させる車両安定制御手段(24)と、車両安定制御手段の作動を判定する車両安定制御判定手段(27)と、車両安定制御手段の作動時にクラッチ(3)を切断状態に設定するクラッチ制御手段(28)とを備えたことを特徴とする。
(もっと読む)
動力伝達装置の制御装置
【課題】 登坂路の傾斜角に依存せず、車両が登坂路でスムーズに発進することができる動力伝達装置の制御装置を提供する。
【解決手段】 本発明の動力伝達装置の制御装置は、加速度センサを用いて車両が停車した状態に相当する際の停車状態相当加速度を算出する加速度算出工程S1と、変速機から駆動輪に出力される駆動トルクと後退トルクとの合成トルクの大きさが制動機構が駆動輪を制動する制動トルクよりも小さくなるか、又は、駆動トルクと後退トルクとの合成トルクの向きが車両を前進させる方向に向いているか、若しくは合成トルクが0になるように、制動機構が発生する制動トルクを漸減させつつ、動力源が発生させるトルクの大きさ及びクラッチトルクにより決定される駆動力を制御する後退防止工程S2と、を備える工程で動力伝達装置を制御する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】動力循環モードでのハイブリッドシステムの効率を更に向上することのできるハイブリッド車両の制御装置を提供する。
【解決手段】パワーマネジメントコントロールコンピューター21は、第1発電電動機7が放電を行うとともに、第2発電電動機14が力行運転される動力循環モード時において、エンジン1で排気再循環が実施されるときには、実施されないときに比してエンジン回転速度が高くなるようにエンジン1の動作点を設定することで、エンジン1での排気再循環の実施に伴う効率の悪化を抑えている。
(もっと読む)
アイドリングストップシステムおよびアイドリングストップの方法
【課題】アイドリングストップからのエンジン再始動時に各種ECUの誤動作を抑制し、エンジンの再始動を円滑に行う。
【解決手段】本発明に関わるアイドリングストップシステムは、車両1の走行停止状態において原動機4を停止および再始動するアイドリングストップシステムであって、ブレーキペダルp2の操作によって発生した制動力を少なくとも一時的に保持する制動力保持制御を実行する制動制御装置6と、ブレーキペダルp2の操作中において、所定の再始動条件が成立した際に停止中の原動機4を再始動する原動機制御装置4Eと、原動機4の再始動に先立って原動機制御装置4Eおよび制動制御装置6以外の少なくとも一つの車両制御デバイス8、9、6、10、11への通電あるいはその診断を一時的に停止する消費電力低減手段4E、8、9、6、10、11とを備えている。
(もっと読む)
車両用加速抑制装置及び車両用加速抑制方法
【課題】自車両が障害物に接近する際の運転性の低下を抑えつつ加速操作の誤操作時の加速抑制をより確実に実施可能とする。
【解決手段】自車両の車速が所定値未満で、自車両進行方向前方の障害物に対する自車両の接近度合Dが、予め設定した接近度合D以上に障害物に近づいたと判定すると、運転者が加速指示するために操作する加速操作子の操作量に応じた加速指令値を抑制する。更に、上記加速指令値を抑制しているときに予め設定した設定加速操作量以上の加速操作を検出すると、加速指令値の抑制量を増大する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】モータ駆動軸を駆動するモータのトルクを用いてエンジン駆動軸を駆動するエンジンのエンジントルクを推定できるハイブリッド車両の制御装置を提供すること。
【解決手段】ハイブリッド車両の制御装置は、エンジントルクに対して比例関係を有し、且つ、最大エンジントルクに対する割合で表示されるエンジン状態情報を検出するエンジン情報検出手段(ステップS5〜ステップS8,ステップS10〜ステップS13)と、車両のトータル駆動力を一定に保持した状態でモータトルクを所定量変化させたときのモータトルクの変化量と、モータトルクの変化に伴うエンジン状態情報の変化量に基づいて、エンジン状態情報をエンジントルクに変換する変換係数を算出する変換係数算出手段(ステップS14〜ステップS19)と、変換係数とエンジン状態情報に基づいて、エンジントルクを算出するエンジントルク算出手段(ステップS20〜ステップS23)と、を備えた。
(もっと読む)
無人走行防止装置
【課題】確実に無人走行を防止でき、かつ低コストな無人走行防止装置を提供する。
【解決手段】運転者が離席した状態で車両が移動する無人走行の発生を判定する無人走行判定部2と、無人走行が発生したとき、最も減速比が大きいギア段に変速機10を切り替え、エンジンが運転中であればエンジンを停止し、クラッチ11を接に制御する無人走行阻止操作を行う無人走行阻止部3と、を備えた。
(もっと読む)
車両の出力制御装置
【課題】運転者が予期していない車両の出力制御が実行されることを正確かつ迅速に防止できるようにする。
【解決手段】アクセル操作とブレーキ操作とが同時に行われたときにエンジンの出力を低下させるエンジン出力低減手段4を備え、アクセル操作が行われたことを検出するアクセル検出手段1と、ブレーキ操作が行われたことを検出するブレーキ検出手段2と、運転者の制動要求意図を推定する制動要求推定手段5と、上記アクセル操作とブレーキ操作とが同時に行われたことが検出された時点から上記エンジン出力低減手段4を作動させてエンジン出力を低下させるまでの作動待機時間を上記制動要求意図に応じて設定する待機時間設定手段6とを有し、上記制動要求推定手段5により運転者の制動要求意図が弱いと推定された場合には、該制動要求意図が強いと推定された場合に比べて上記作動待機時間を長くするように構成した。
(もっと読む)
車載パワーユニットの変速制御装置
【課題】変速装置の変速時における変速ギアのハーフニュートラル状態の頻度を低減し、ハーフニュートラル状態に陥っても空走時間を短縮し、操作感の良好な変速制御装置を供する。
【解決手段】車載パワーユニット1の変速制御装置2において、燃焼制御手段41と、クラッチ作動機構24と、クラッチ作動状態検出手段57と、変速指示手段42、43と、変速段切替機構と35、変速制御手段40とを備え、前記変速制御手段40は、変速指示信号を入力すると、クラッチ作動機構24を駆動し、クラッチ作動状態検出手段57が検出した変速クラッチCの半クラッチ状態の信号が入力されると、燃焼制御手段41により内燃機関Eの燃焼を停止し、変速段切替機構35により変速装置Mの変速段Gの切り替えを開始することを特徴とする車載パワーユニット1の変速制御装置2。
(もっと読む)
シフトショック低減構造を備える車両
【課題】ユーザのクラッチ操作によらず、クラッチ接続時のシフトショックを低減できる、シフトショック低減構造を備える車両を提供する。
【解決手段】変速機(42)と、変速機(42)への動力を断接するクラッチ(44)とを有したエンジンを備え、シフトペダル(33)の踏み込みによる一の操作に基づきクラッチ切断、シフトを連動して行い、シフトペダル(33)の戻りによる他の操作に基づきクラッチ接続を行い、シフトペダル(33)の踏み込みに連動してシフトスピンドル(124)が回転する構造とし、シフトスピンドル角度の単位時間当たりの変化量に基づいて前記一の操作の操作速度を求め、前記一の操作の操作速度に応じて前記他の操作によるクラッチ接続時にエンジン回転数を制御する制御ユニット(26)を備える。
(もっと読む)
1 - 20 / 337
[ Back to top ]