
Fターム[3G093DB03]の内容
車両用機関又は特定用途機関の制御 (95,902) | パラメータ、検出(機関以外) (18,896) | 回転数(回転速度) (1,537) | 車輪の回転数(回転速度) (711) | 駆動輪の回転数(回転速度) (236)
Fターム[3G093DB03]に分類される特許
1 - 20 / 236
作業車両
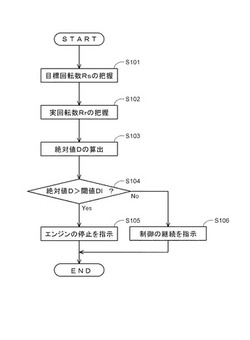
【課題】エンジンを停止することによって油圧の上昇を防止し、作業車両毎にリリーフ圧力の設定が必要とされていたリリーフバルブの共用化を図り、リリーフ圧力の確認工数を低減できる技術を提供する。
【解決手段】制御装置9は、目標回転数Rsと実回転数Rrの差(絶対値D)が閾値Dl以下となる場合に実回転数Rrが目標回転数Rsとなるように変速比変更手段(油圧アクチュエータ31A)を制御し、目標回転数Rsと実回転数Rrの差(絶対値D)が閾値Dlよりも大きい場合にエンジン停止手段87によってエンジン2を停止させる、とした。
(もっと読む)
車両の制御装置

【課題】車両の制御装置に関し、エンジンの燃費を効果的に向上させる。
【解決手段】アクセルセンサ18と、回転数センサ19と、アクセル開度とエンジン出力とに対応する座標平面上に変速機等出力回転数線が設定された第1のマップからエンジン出力を設定するエンジン出力設定部41と、エンジン出力と燃料噴射量とに対応する座標平面上に最少燃料噴射量線が設定された第2のマップから目標燃料噴射量を設定する目標燃料噴射量設定部42と、エンジン出力とエンジン回転数とに対応する座標平面上に最適エンジン回転数線が設定された第3のマップから目標エンジン回転数を設定する目標エンジン回転数設定部43と、変速機出力回転数と目標エンジン回転数とに基づいて目標変速比を算出する目標変速比演算部44と、エンジン10を制御するエンジンECU20と、変速機12を制御する変速機ECU30とを備えた。
(もっと読む)
車両の制御装置
【課題】車両の制御装置に関し、エンジンの燃費を効果的に向上させる。
【解決手段】アクセルセンサ18と、回転数センサ19と、シフトポジションセンサ17と、変速機出力回転数と出力トルクとに対応する座標平面上に等アクセル開度線が設定された第1のマップから変速機出力トルクを設定する変速機出力トルク設定部41と、変速機出力回転数と変速機出力トルクとに基づいてエンジン出力を算出するエンジン出力演算部42と、エンジン出力とエンジン回転数とに対応する座標平面上に複数本の最適エンジン回転数線が設定された第2のマップから目標エンジン回転数を設定する目標エンジン回転数設定部43と、変速機出力回転数と目標エンジン回転数とに基づいて目標変速比を算出する目標変速比演算部44と、変速比が目標変速比となるように変速機12を制御する変速機ECU30とを備えた。
(もっと読む)
内燃機関の制御装置
【課題】駆動系の部品の重量やコストの増加を招くことなく、スリップとグリップとを繰り返すことによる駆動系部品に過大な負荷がかかることを抑制する。
【解決手段】出力軸回転数検知手段を介して検出された駆動系の出力軸回転数を用いて駆動輪9がスリップとグリップの反復を生じている状態を検知した場合に、内燃機関3の出力を低下させる制御を行う。駆動輪がスリップとグリップの反復を生じている状態を初期段階で判断して、一時的に内燃機関の出力を低下させるように制御する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】減速要求中、エンジン回転数の低下を遅らせることで再加速要求への移行に備えること。
【解決手段】ハイブリッド車両の制御装置は、エンジンEngと、ベルト式無段変速機構3と、ローブレーキL/B又はハイクラッチH/Cと、モータ・ジェネレータM/Gと、左右駆動タイヤLT,RTと、統合コントローラ59と、を備える。ローブレーキL/B又はハイクラッチH/Cは、ベルト式無段変速機構3の下流側の位置に配置され、開放することにより動力伝達を遮断する。モータ・ジェネレータM/Gは、ローブレーキL/B又はハイクラッチH/Cの下流側の位置に配置され、駆動・回生に用いられる。統合コントローラ59は、エンジンEngへの燃料噴射を停止する減速要求時、ローブレーキL/B又はハイクラッチH/Cを開放した後、ベルト式無段変速機構3の変速比をロー側へ変速する減速時制御を行う。
(もっと読む)
車両の制御装置
【課題】クランキング中にABS制御を時間遅れなく行うことができる車両の制御装置を提供すること。
【解決手段】所定の停止条件が成立するとエンジン1を自動停止し、その後に所定の始動条件が成立するとスタータモータ2を起動してエンジン1を再始動する自動停止始動装置と、車両の減速度と各車輪の回転速度及びブレーキ液圧に基づいて前輪4L,4Rと後輪5L,5Rの最適回転速度を算出し、算出した最適回転速度に基づいて電磁弁を開閉制御してブレーキ液圧を制御するABSと、を有する車両の制御装置において、前記自動停止始動装置によるエンジン1の再始動中にABS制御信号を受信すると同時に省電力モードによって前記ABS制御を開始する。ここで、省電力モードによるABS制御においては、ABSのポンプモータを駆動しない。
(もっと読む)
自動二輪車のトラクション制御装置
【課題】電源不足が生じても自動二輪車のトラクション制御の誤動作や中断がないようにする。
【解決手段】少なくとも前車輪速センサおよび後車輪速センサに供給するためにバッテリの出力電圧に基づいてセンサ駆動電圧を作成し、そのセンサ駆動電圧に基づくセンサ電圧またはバッテリの出力電圧に基づく電源電圧が、少なくとも前車輪速センサおよび後車輪速センサが正常に作動する電圧範囲として設定される所定電圧範囲から外れた状態では、エンジンの回転加速度に基づいて車輪スリップ状態を判断し、その判断結果に基づいて算出したエンジン制御量でエンジン出力を制御する。
(もっと読む)
騎乗型車両の発進制御装置
【課題】 騎乗型車両を円滑に発進可能にする。
【解決手段】 車両1が発進前の状態であるとの条件を含む発進制御開始条件が成立するか否かを判定する開始条件判定部31と、発進制御時における走行動力発生源10の回転数の目標値を予め記憶する記憶部32と、開始条件判定部31により発進制御開始条件が成立したと判定されると、走行動力発生源10の回転数を目標値となるように制御する発進制御を実行する発進制御部34と、走行動力発生源10から駆動輪2bへの動力伝達経路15に介設されたクラッチ17の作動状態を判定するクラッチ状態判定部33と、を備え、発進制御部34は、クラッチ状態判定部33により判定されるクラッチ17の作動状態に応じて目標値を決定する。
(もっと読む)
車両の制御装置
【課題】ブレーキオーバーライドシステムを採用する車両でのドライバビリティーを向上することのできる車両の制御装置を提供する。
【解決手段】スロットルバルブ4を制御するスロットルコントローラー3は、トランクションコントロールシステム2によるエンジン出力の抑制中に、アクセル及びブレーキの同時操作がなされてブレーキオーバーライドシステム1が作動すると、トランクションコントロールシステム2の要求があってもエンジン出力が増加されないようにスロットル開度の増加に制限をかける。
(もっと読む)
制駆動力制御装置および制駆動力制御方法
【課題】燃費の向上と、操縦安定性および乗り心地性能との両立を図る。
【解決手段】推定した車体のバネ上挙動を構成する成分のうち、ピッチ変動成分の抑制度合いを他の成分の抑制度合いよりも高く設定した燃費向上モードと、車体のバネ上挙動を構成する成分を燃費向上モードと異なる抑制度合いで抑制するように設定した他のモードとに基づいて、車両の走行状況に対応する制駆動力の補正トルクを算出する補正トルク算出手段と、車両の走行状況に基づいて、燃費向上モードと他のモードとの少なくとも一方の重み係数を算出する重み係数算出手段と、燃費向上モードおよび他のモードの各補正トルクを、燃費向上モードと他のモードとの重みに応じて加算し、運転者の制駆動操作により定めた要求制駆動トルクに対する補正トルクの指令値を算出するトルク指令値算出手段とを有する制駆動力制御装置とした。
(もっと読む)
ハイブリッド駆動装置の制御装置
【課題】EV走行モードの領域を広げることを可能とし、もって燃費向上を図ることが可能なハイブリッド駆動装置の制御装置を提供する。
【解決手段】ハイブリッド駆動装置1の制御装置100は、EV走行モードからエンジン走行モードに変更された際に、エンジン始動制御手段105がクラッチ4を係合制御しつつエンジン9の回転数を上昇させてエンジン9を始動させると共に、始動時アップシフト制御手段107が該エンジン9の回転上昇に合わせて変速機構3の変速比をアップシフト変速して該変速機構3にてイナーシャトルクTiを発生させる。EV走行モードとエンジン走行モードとを選択するモード選択手段106が、変速機構3の変速比及び入力軸6の回転数、即ちエンジン始動時に発生するイナーシャトルクTiに応じて、EV走行モードを選択する領域を広げる。これにより、エンジン走行モードの領域が減少して燃費向上が図られる。
(もっと読む)
車両の出力制御装置
【課題】運転者が予期していない車両の出力制御が実行されることを正確かつ迅速に防止できるようにする。
【解決手段】アクセル操作とブレーキ操作とが同時に行われたときにエンジンの出力を低下させるエンジン出力低減手段4を備え、アクセル操作が行われたことを検出するアクセル検出手段1と、ブレーキ操作が行われたことを検出するブレーキ検出手段2と、運転者の制動要求意図を推定する制動要求推定手段5と、上記アクセル操作とブレーキ操作とが同時に行われたことが検出された時点から上記エンジン出力低減手段4を作動させてエンジン出力を低下させるまでの作動待機時間を上記制動要求意図に応じて設定する待機時間設定手段6とを有し、上記制動要求推定手段5により運転者の制動要求意図が弱いと推定された場合には、該制動要求意図が強いと推定された場合に比べて上記作動待機時間を長くするように構成した。
(もっと読む)
車両の駆動輪に働く駆動力を制限する駆動力制限装置
【課題】推定速度の精度を向上可能な駆動力制限装置を提供すること。
【解決手段】車両の駆動輪に働く駆動力を制限する駆動力制限装置は、前記車両の第1の加速度を補正して、補正された前記第1の加速度を第2の加速度として得る加速度補正部と、前記駆動輪の車輪速度及び前記第1の加速度に基づき前記車両の第1の速度を算出する第1の算出部と、前記車輪速度及び前記第2の加速度に基づき前記車両の第2の速度を算出する第2の算出部と、前記第1の速度と前記第2の速度との差が第1の閾値以上である場合、前記駆動力を制限する制限駆動力を要求する要求部と、前記第2の速度を前記車両の推定速度として用いる推定部と、を備える。前記要求部が前記制限駆動力を要求することによって、前記車輪速度が第2の閾値を下回る時、前記推定部は、前記第2の速度を前記第1の速度でリセットして前記推定速度を得る。
(もっと読む)
トラクション制御装置
【課題】トラクション制御中のフェール時に、ユーザに過度な負担を強いる限定しすぎたフェール処理を回避することができるトラクション制御装置を提供する。
【解決手段】アクセル開度αAに応じてモータ57でスロットル制御を行うスロットルバイワイヤ手段(TBW)61を備え、駆動輪WRのスリップ検出時にTBW61によってスロットル弁開度θTHを第1予定値θTHTCSに低減する。スロットル弁開度θTHを第1予定開度θTHTCSに低減している間にフェールを検出した場合にTBW61によってスロットル弁開度θTHを第2予定値θTHidleまでさらに低減させる。スロットル弁開度θTHを第2予定値θTHidleに低減している間にアクセルグリップ24Rが全閉位置に操作された場合はTBW61による制御を停止し、アクセル開度αAに応じて直接アクセルグリップ24Rの操作によるスロットル制御を行えるようにする。
(もっと読む)
自動二輪車の姿勢制御装置及び姿勢制御方法
【課題】部品点数を多くすることなく後輪の浮き上がりを戻すことができる自動二輪車の姿勢制御装置及び姿勢制御方法を提供する。
【解決手段】ブレーキ作動時に後輪WRが走行面より浮いた状態か否かを検出し(ステップS2)、後輪WRが浮いた状態であると検出されると(ステップS2:YES)、後輪WRの回転を上昇させてその反作用により車体後部を下げて後輪WRを接地させる制御を行うようにした(ステップS3)。
(もっと読む)
車両の制御装置
【課題】 車両減速状態における機関出力制御及びロックアップクラッチ締結制御を適切に行い、運転者の違和感を解消するとともに燃費を向上させることができる車両の制御装置を提供する。
【解決手段】 ロックアップクラッチ30を締結するときの目標メインシャフト回転数NTMOBJに応じてLC制御下限トルクTRQLMLを設定し、車両減速中において機関出力がLC制御下限トルクTRQLMLに達した後はLC制御下限トルクTRQLMLに保持する制御を実行し、機関出力がLC制御下限トルクTRQLMLに保持されている期間においてロックアップクラッチ30の締結を実行する(t2)。機関出力をLC制御下限トルクTRQLMLに保持する出力保持制御を実行することにより、機関回転数NEが目標メインシャフト回転数NTMOBJ近傍に維持される。
(もっと読む)
ハイブリッド車両の制御装置
【課題】クラッチスリップ制御中、目標駆動トルクが所定値を超える領域でのクラッチスリップを維持しつつ、目標駆動トルクが所定値以下のときに駆動輪への駆動トルク伝達を確保すること。
【解決手段】ハイブリッド車両の制御装置は、エンジンおよびモータジェネレータと、第2クラッチと、目標CL2トルク容量演算部404を有するクラッチ動作制御手段と、を備える。目標CL2トルク容量演算部404は、第2クラッチへのスリップ要求時、目標入力軸回転数ωCL2i*より実入力軸回転数ωCL2iが低いとき、入力軸回転数偏差(ωCL2i*−ωCL2i)を無くすように第2クラッチの目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御を実施する。そして、第2クラッチのスリップ制御中、目標駆動トルクTd*がクリープトルク以下のとき、目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御を停止する。
(もっと読む)
車両用走行制御装置及び車両用走行制御方法
【課題】ハイブリッド車両の車速制限制御時において、より適切にエンジン運転状態を制御する。
【解決手段】駆動輪7L,7Rに駆動力を伝達する駆動源としてエンジン1及びモータジェネレータ2を有するハイブリッド車両の走行速度を、ステアリングスイッチ28で設定されたリミッタ車速以下で維持するように自動調整する制御であるASL制御を行っているときに、アクセルペダル33の操作に応じたドライバ要求トルクと、車速制限時の駆動トルクである車速リミッタトルクとのセレクトローによって決定される目標駆動トルクから逆算して求められる擬似アクセル開度VAPOに基づき、エンジン1を始動するか又は停止するかのいずれかの判定を行う。
(もっと読む)
ハイブリッド車両の制御装置
【課題】クラッチスリップ制御中、ワンウェイクラッチが係合ロック状態のときクラッチスリップを維持しつつ、ワンウェイクラッチが係合ロック解除状態から再び係合ロック状態に移行した際に車両挙動の急変を防止すること。
【解決手段】ハイブリッド車両はエンジンおよびモータジェネレータ、第2クラッチおよびワンウェイクラッチを備え、制御装置は目標CL2トルク容量演算部404を有するクラッチ動作制御手段、を備え、目標CL2トルク容量演算部404は、第2クラッチへのスリップ要求時、入力軸回転数偏差(ωCL2i*−ωCL2i)を無くすように第2クラッチの目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御を実施する。そして、第2クラッチのスリップ制御中、ワンウェイクラッチが係合ロック解除状態であると検出されたとき、目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御の実施を停止する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 コースト走行時に安定した減速を達成可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 エンジンとモータジェネレータとからなる動力源と、動力源と駆動輪との間に介装され、複数の変速段を達成すると共に、1速をワンウェイクラッチの係合により達成する自動変速機と、自動変速機を変速する変速手段と、コースト走行中の減速の時は、動力源により負トルクである目標コーストトルクを発生させ、変速手段により1速へのダウンシフトが終了する前に、目標コーストトルクを0または正トルクとするコーストトルク制御手段と、を備えた。
(もっと読む)
1 - 20 / 236
[ Back to top ]