
Fターム[3G093DB04]の内容
車両用機関又は特定用途機関の制御 (95,902) | パラメータ、検出(機関以外) (18,896) | 回転数(回転速度) (1,537) | 車輪の回転数(回転速度) (711) | 従動輪の回転数(回転速度) (138)
Fターム[3G093DB04]に分類される特許
1 - 20 / 138
作業車両
【課題】エンジンを停止することによって油圧の上昇を防止し、作業車両毎にリリーフ圧力の設定が必要とされていたリリーフバルブの共用化を図り、リリーフ圧力の確認工数を低減できる技術を提供する。
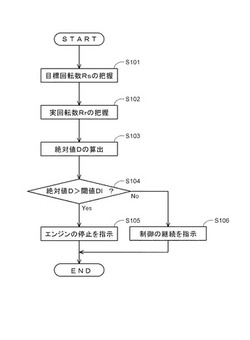
【解決手段】制御装置9は、目標回転数Rsと実回転数Rrの差(絶対値D)が閾値Dl以下となる場合に実回転数Rrが目標回転数Rsとなるように変速比変更手段(油圧アクチュエータ31A)を制御し、目標回転数Rsと実回転数Rrの差(絶対値D)が閾値Dlよりも大きい場合にエンジン停止手段87によってエンジン2を停止させる、とした。
(もっと読む)
ハイブリッド車両の制御装置

【課題】減速要求中、エンジン回転数の低下を遅らせることで再加速要求への移行に備えること。
【解決手段】ハイブリッド車両の制御装置は、エンジンEngと、ベルト式無段変速機構3と、ローブレーキL/B又はハイクラッチH/Cと、モータ・ジェネレータM/Gと、左右駆動タイヤLT,RTと、統合コントローラ59と、を備える。ローブレーキL/B又はハイクラッチH/Cは、ベルト式無段変速機構3の下流側の位置に配置され、開放することにより動力伝達を遮断する。モータ・ジェネレータM/Gは、ローブレーキL/B又はハイクラッチH/Cの下流側の位置に配置され、駆動・回生に用いられる。統合コントローラ59は、エンジンEngへの燃料噴射を停止する減速要求時、ローブレーキL/B又はハイクラッチH/Cを開放した後、ベルト式無段変速機構3の変速比をロー側へ変速する減速時制御を行う。
(もっと読む)
車両の制御装置、車両及び原動機
【課題】ブリッピング操作による変速期間中のショックを抑制すると共に、変速期間後にアクセルの操作に応じた動作に迅速に移ることが可能な車両の制御装置を提供する。
【解決手段】本発明の車両の制御装置は、アクセルの操作量に基づいてスロットルバルブの開度を決定する開度決定部57と、エンジンの回転速度の下降を伴う変速期間中において、スロットルバルブの開度が、伝達経路からエンジンに入力される負荷トルクよりも出力トルクが大きくなる値から、出力トルクと負荷トルクとが等しくなる境界値に向かって変化する場合に、スロットルバルブの開度の時間変化率を低減する変化抑制部59と、を備える。
(もっと読む)
車両の制御装置
【課題】クランキング中にABS制御を時間遅れなく行うことができる車両の制御装置を提供すること。
【解決手段】所定の停止条件が成立するとエンジン1を自動停止し、その後に所定の始動条件が成立するとスタータモータ2を起動してエンジン1を再始動する自動停止始動装置と、車両の減速度と各車輪の回転速度及びブレーキ液圧に基づいて前輪4L,4Rと後輪5L,5Rの最適回転速度を算出し、算出した最適回転速度に基づいて電磁弁を開閉制御してブレーキ液圧を制御するABSと、を有する車両の制御装置において、前記自動停止始動装置によるエンジン1の再始動中にABS制御信号を受信すると同時に省電力モードによって前記ABS制御を開始する。ここで、省電力モードによるABS制御においては、ABSのポンプモータを駆動しない。
(もっと読む)
動力伝達装置
【課題】クリープの状態における適正な制御ができる動力伝達装置を提供すること。
【解決手段】搭乗者の操作の大きさににより前記車両の減速を指示するブレーキペダルBPについて、そのブレーキペダルの操作が行われなくなった後、車両速度が所定の速度以下であるときに、クリープ状態が所定時間以上継続しているときに、所定速度に至るまで、前記クラッチトルクを漸増させ、且つ、クラッチトルクの上昇に遅れて前記出力軸からの出力トルクの大きさを漸増させるように前記内燃機関を制御する制御装置を有することである。
(もっと読む)
自動二輪車のトラクション制御装置
【課題】電源不足が生じても自動二輪車のトラクション制御の誤動作や中断がないようにする。
【解決手段】少なくとも前車輪速センサおよび後車輪速センサに供給するためにバッテリの出力電圧に基づいてセンサ駆動電圧を作成し、そのセンサ駆動電圧に基づくセンサ電圧またはバッテリの出力電圧に基づく電源電圧が、少なくとも前車輪速センサおよび後車輪速センサが正常に作動する電圧範囲として設定される所定電圧範囲から外れた状態では、エンジンの回転加速度に基づいて車輪スリップ状態を判断し、その判断結果に基づいて算出したエンジン制御量でエンジン出力を制御する。
(もっと読む)
車両の制御装置
【課題】ブレーキオーバーライドシステムを採用する車両でのドライバビリティーを向上することのできる車両の制御装置を提供する。
【解決手段】スロットルバルブ4を制御するスロットルコントローラー3は、トランクションコントロールシステム2によるエンジン出力の抑制中に、アクセル及びブレーキの同時操作がなされてブレーキオーバーライドシステム1が作動すると、トランクションコントロールシステム2の要求があってもエンジン出力が増加されないようにスロットル開度の増加に制限をかける。
(もっと読む)
騎乗型車両の発進制御装置
【課題】 騎乗型車両を円滑に発進可能にする。
【解決手段】 車両1が発進前の状態であるとの条件を含む発進制御開始条件が成立するか否かを判定する開始条件判定部31と、発進制御時における走行動力発生源10の回転数の目標値を予め記憶する記憶部32と、開始条件判定部31により発進制御開始条件が成立したと判定されると、走行動力発生源10の回転数を目標値となるように制御する発進制御を実行する発進制御部34と、走行動力発生源10から駆動輪2bへの動力伝達経路15に介設されたクラッチ17の作動状態を判定するクラッチ状態判定部33と、を備え、発進制御部34は、クラッチ状態判定部33により判定されるクラッチ17の作動状態に応じて目標値を決定する。
(もっと読む)
制駆動力制御装置および制駆動力制御方法
【課題】燃費の向上と、操縦安定性および乗り心地性能との両立を図る。
【解決手段】推定した車体のバネ上挙動を構成する成分のうち、ピッチ変動成分の抑制度合いを他の成分の抑制度合いよりも高く設定した燃費向上モードと、車体のバネ上挙動を構成する成分を燃費向上モードと異なる抑制度合いで抑制するように設定した他のモードとに基づいて、車両の走行状況に対応する制駆動力の補正トルクを算出する補正トルク算出手段と、車両の走行状況に基づいて、燃費向上モードと他のモードとの少なくとも一方の重み係数を算出する重み係数算出手段と、燃費向上モードおよび他のモードの各補正トルクを、燃費向上モードと他のモードとの重みに応じて加算し、運転者の制駆動操作により定めた要求制駆動トルクに対する補正トルクの指令値を算出するトルク指令値算出手段とを有する制駆動力制御装置とした。
(もっと読む)
車両の駆動輪に働く駆動力を制限する駆動力制限装置
【課題】推定速度の精度を向上可能な駆動力制限装置を提供すること。
【解決手段】車両の駆動輪に働く駆動力を制限する駆動力制限装置は、前記車両の第1の加速度を補正して、補正された前記第1の加速度を第2の加速度として得る加速度補正部と、前記駆動輪の車輪速度及び前記第1の加速度に基づき前記車両の第1の速度を算出する第1の算出部と、前記車輪速度及び前記第2の加速度に基づき前記車両の第2の速度を算出する第2の算出部と、前記第1の速度と前記第2の速度との差が第1の閾値以上である場合、前記駆動力を制限する制限駆動力を要求する要求部と、前記第2の速度を前記車両の推定速度として用いる推定部と、を備える。前記要求部が前記制限駆動力を要求することによって、前記車輪速度が第2の閾値を下回る時、前記推定部は、前記第2の速度を前記第1の速度でリセットして前記推定速度を得る。
(もっと読む)
トラクション制御装置
【課題】トラクション制御中のフェール時に、ユーザに過度な負担を強いる限定しすぎたフェール処理を回避することができるトラクション制御装置を提供する。
【解決手段】アクセル開度αAに応じてモータ57でスロットル制御を行うスロットルバイワイヤ手段(TBW)61を備え、駆動輪WRのスリップ検出時にTBW61によってスロットル弁開度θTHを第1予定値θTHTCSに低減する。スロットル弁開度θTHを第1予定開度θTHTCSに低減している間にフェールを検出した場合にTBW61によってスロットル弁開度θTHを第2予定値θTHidleまでさらに低減させる。スロットル弁開度θTHを第2予定値θTHidleに低減している間にアクセルグリップ24Rが全閉位置に操作された場合はTBW61による制御を停止し、アクセル開度αAに応じて直接アクセルグリップ24Rの操作によるスロットル制御を行えるようにする。
(もっと読む)
車両の制御装置
【課題】 車両減速状態における機関出力制御及びロックアップクラッチ締結制御を適切に行い、運転者の違和感を解消するとともに燃費を向上させることができる車両の制御装置を提供する。
【解決手段】 ロックアップクラッチ30を締結するときの目標メインシャフト回転数NTMOBJに応じてLC制御下限トルクTRQLMLを設定し、車両減速中において機関出力がLC制御下限トルクTRQLMLに達した後はLC制御下限トルクTRQLMLに保持する制御を実行し、機関出力がLC制御下限トルクTRQLMLに保持されている期間においてロックアップクラッチ30の締結を実行する(t2)。機関出力をLC制御下限トルクTRQLMLに保持する出力保持制御を実行することにより、機関回転数NEが目標メインシャフト回転数NTMOBJ近傍に維持される。
(もっと読む)
ハイブリッド車両の制御装置
【課題】クラッチスリップ制御中、ワンウェイクラッチが係合ロック状態のときクラッチスリップを維持しつつ、ワンウェイクラッチが係合ロック解除状態から再び係合ロック状態に移行した際に車両挙動の急変を防止すること。
【解決手段】ハイブリッド車両はエンジンおよびモータジェネレータ、第2クラッチおよびワンウェイクラッチを備え、制御装置は目標CL2トルク容量演算部404を有するクラッチ動作制御手段、を備え、目標CL2トルク容量演算部404は、第2クラッチへのスリップ要求時、入力軸回転数偏差(ωCL2i*−ωCL2i)を無くすように第2クラッチの目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御を実施する。そして、第2クラッチのスリップ制御中、ワンウェイクラッチが係合ロック解除状態であると検出されたとき、目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御の実施を停止する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】クラッチスリップ制御中、目標駆動トルクが所定値を超える領域でのクラッチスリップを維持しつつ、目標駆動トルクが所定値以下のときに駆動輪への駆動トルク伝達を確保すること。
【解決手段】ハイブリッド車両の制御装置は、エンジンおよびモータジェネレータと、第2クラッチと、目標CL2トルク容量演算部404を有するクラッチ動作制御手段と、を備える。目標CL2トルク容量演算部404は、第2クラッチへのスリップ要求時、目標入力軸回転数ωCL2i*より実入力軸回転数ωCL2iが低いとき、入力軸回転数偏差(ωCL2i*−ωCL2i)を無くすように第2クラッチの目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御を実施する。そして、第2クラッチのスリップ制御中、目標駆動トルクTd*がクリープトルク以下のとき、目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御を停止する。
(もっと読む)
車両制御装置
【課題】停止していたエンジンを始動するときのショックの抑制と応答性の向上とを両立できる車両制御装置を提供すること。
【解決手段】エンジンと、変速機と、変速機を介したエンジンと車両の駆動輪との動力の伝達を接続あるいは遮断するクラッチと、エンジンから駆動輪に対する動力の伝達を許容し、かつ駆動輪からエンジンに対する動力の伝達を遮断するワンウェイクラッチと、を備え、停止していたエンジンを車両の走行中に始動するとき(S11−Y)に、車両の車速と変速機の変速比とに基づいてクラッチの係合タイミングを変化させる(S14〜S18)所定制御を行う。
(もっと読む)
アイドル回転数制御装置
【課題】エンジンのアイドル運転中に、電気負荷の変動状態が相対的に大きく変動した場合であっても、エンジンのアイドル回転数が不要に変動することを抑制可能な簡便な構成のアイドル回転数制御装置を提供する。
【解決手段】反転判断部63が、電気負荷が実質的に変動中である状態(第1の状態)及び電気負荷の変動状態が実質的に変動無しの状態(第2の状態)の一方の状態から他方の状態に反転した場合を電気負荷の変動が大きい場合と判断し、制御切換え部64が、目標回転数制御部61による制御を停止して目標開度制御部62の制御を開始する。
(もっと読む)
車両用走行制御装置
【課題】コースト状態においてエンジンの始動と変速の制御とをより適切に行うこと。
【解決手段】駆動源となるエンジンおよびモータと、駆動源からの駆動力を異なるギヤ比で車輪に伝達する変速機と、エンジンの始動を制御するエンジン始動制御手段と、変速機の変速を制御する変速制御手段と、自車両がモータのみを駆動源として走行し、かつ、コースト状態であるときに、エンジンの始動要求と変速機の変速要求とが発生しているか否かを判定する始動判定手段と、を備え、始動判定手段が、自車両が前記モータのみを駆動源として走行し、かつ、コースト状態であるときに、エンジンの始動要求と変速機の変速要求とが発生していると判定した場合に、エンジン始動制御手段は、変速制御手段が現在の変速段から目標変速段に掛け替えを完了するまでエンジンの始動を禁止し、該掛け替えの完了後に、エンジンを始動させる。
(もっと読む)
車両用走行制御装置
【課題】クルーズ走行などの自動走行に移行する際に、運転者に与える違和感を抑えることを可能とする。
【解決手段】運転者によるステアリングスイッチ28の操作によって定速走行に移行する際に、エンジン停止の処理中若しくはエンジン停止処理に移行したと判定すると、EVモードに移行することなく、エンジンを運転状態に復帰させる処理を行う。
(もっと読む)
車両の制御装置
【課題】摩擦係合要素状態のばらつきに拘らず、駆動源回転数の吹け上がりを抑制することができる車両の制御装置を提供する。
【解決手段】本発明の車両の制御装置は、駆動源制御手段(図11)により、駆動源(エンジン)1からの出力トルクを制御するトルク指令値を、伝達容量検出手段(CL1ストロークセンサ)16により検出された摩擦係合要素(第1クラッチ)4における伝達トルク容量を超えない値に設定する。
(もっと読む)
電動車両の制御装置
【課題】モータと駆動輪の間のトルク伝達を断接する摩擦係合要素における目標伝達トルク容量の補正精度を向上することができる電動車両の制御装置を提供すること。
【解決手段】本発明の電動車両の制御装置は、走行駆動源となるモータ(モータジェネレータ)2と駆動輪(タイヤ)7,7の間に介装され、モータ2と駆動輪7,7との間のトルク伝達を断接する摩擦係合要素(第2クラッチ)5における目標指令値(目標伝達トルク容量)を設定する際、補正量演算手段(補正量演算部)401Bにより、目標指令値の補正量を、摩擦係合要素5への入力トルク(推定モータトルク)が増大するほど大きな値に設定する。
(もっと読む)
1 - 20 / 138
[ Back to top ]