
Fターム[3G093FA05]の内容
車両用機関又は特定用途機関の制御 (95,902) | 制御部の特徴 (6,324) | 演算部内での処理 (5,972) | 帰還制御 (2,284) | 制御定数(ゲイン)の変更 (96)
Fターム[3G093FA05]に分類される特許
1 - 20 / 96
ハイブリッド車両の制御装置
【課題】モータのみによる走行中に内燃機関が始動開始される際、同機関の初爆後に機関回転速度を速やかに目標値に到達させつつ、その機関回転速度の目標値に対する過上昇を的確に抑制する。
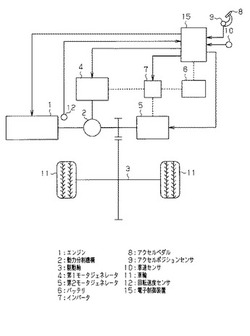
【解決手段】ハイブリッド車両の第2モータジェネレータ5のみによる走行中における車両要求パワーの増大等に伴って内燃機関1が始動開始される際、同機関1に対し第1モータジェネレータ4による負トルクを作用させることが行われる。詳しくは、車両要求パワーが小さいときには、同パワーが大きいときよりも、内燃機関1における出力トルクの推定値の増大に基づく上記負トルクの増大が急速に行われる。これにより、車両要求パワーが大きいときには上記負トルクを緩やかに増大させて機関回転速度の目標値への速やかな上昇を実現する一方、車両要求パワーが小さいときには上記負トルクを急速に増大させて機関回転速度の目標値に対する過上昇を抑制することが可能になる。
(もっと読む)
ハイブリッド車両の制御装置

【課題】排気再循環を実行しているときに加速要求がなされた場合に、排気再循環を実行していないときに比べて加速感が悪化してしまうことを抑制することのできるハイブリッド車両の制御装置を提供する。
【解決手段】パワーマネジメントコントロールコンピュータ500は、等パワー曲線と燃費動作線との交点となるエンジン動作点に基づいて目標エンジン回転数と目標エンジントルクとを設定して排気再循環機構115を備えたエンジン110を制御する。パワーマネジメントコントロールコンピュータ500は、排気再循環が実行されているか否かに応じて燃費動作線を変更し、排気再循環が実行されているときには目標エンジン回転数が高くなるようにする。パワーマネジメントコントロールコンピュータ500は、排気再循環が実行されているときは、排気再循環が実行されていないときよりもエンジン動作点の単位時間当たりの変化量を小さくする。
(もっと読む)
制駆動力制御装置および制駆動力制御方法
【課題】燃費の向上と、操縦安定性および乗り心地性能との両立を図る。
【解決手段】推定した車体のバネ上挙動を構成する成分のうち、ピッチ変動成分の抑制度合いを他の成分の抑制度合いよりも高く設定した燃費向上モードと、車体のバネ上挙動を構成する成分を燃費向上モードと異なる抑制度合いで抑制するように設定した他のモードとに基づいて、車両の走行状況に対応する制駆動力の補正トルクを算出する補正トルク算出手段と、車両の走行状況に基づいて、燃費向上モードと他のモードとの少なくとも一方の重み係数を算出する重み係数算出手段と、燃費向上モードおよび他のモードの各補正トルクを、燃費向上モードと他のモードとの重みに応じて加算し、運転者の制駆動操作により定めた要求制駆動トルクに対する補正トルクの指令値を算出するトルク指令値算出手段とを有する制駆動力制御装置とした。
(もっと読む)
車両の制御装置
【課題】 クラッチ締結動作中において、運転者が意図しない機関出力制御が行われること、及び機関回転数の吹け上がりを適切に防止する。
【解決手段】 車両の発進時においてエンジン回転数NEが低下すると、クラッチ締結フィードバック制御が開始される。アクセルペダルが踏み込まれ、かつエンジン回転数NEが目標回転数NOBJ以下であるときは、フィードバック制御の比例項CLFBP、積分項CLFBI、及び微分項CLFBDが算出され、これらを加算することによりクラッチ締結フィードバック制御開度THCLFBが算出される。エンジン回転数NEが目標回転数NOBJを超えるとクラッチ締結フィードバック制御開度THCLFBが前回値THCLFBBに維持される。
(もっと読む)
自動車
【課題】内燃機関や電動機の回転変動が大きくなるのを抑制する。
【解決手段】エンジンの回転数Neに応じた爆発周波数Fexとダンパを含む後段軸側の共振の周波数である後段軸側共振周波数Fdとの差の絶対値が閾値Fref以下のときには(S130)、爆発周波数Fexと後段軸側共振周波数Fdとの差の絶対値が閾値Frefより大きいときに比して小さな所定値Kp2,Ki2を設定したゲインKp,Kiを用いたフィードバック制御によってエンジンの回転数Neが目標回転数Ne*となるようモータMG1のトルク指令Tm1*を設定してモータMG1を制御する(S150,S160)。これにより、エンジンやモータMG1の回転変動が大きくなるのを抑制することができ、車両の振動を抑制することができる。
(もっと読む)
エンジンの制御装置
【課題】アイドルストップ期間中のスロットル動作応答を迅速にして、エンジンの再始動時間を短縮する。
【解決手段】エンジン冷却水温、車速、ブレーキ情報等を入力し、ISSの実施判定を行うISS判定手段5と、ISS制御期間中の目標開度を設定する目標開度設定手段6から成るISS制御部3、ISS制御期間中は、スロットル開度フィードバック制御演算で用いられる比例ゲインをISS制御期間中以外の比例ゲインより大きい値に補正する比例ゲイン補正係数演算手段9と、補正された比例ゲインを含めた制御ゲインを用いて目標開度と実開度の開度偏差に基づきスロットル開度フィードバック制御演算を行うスロットル開度フィードバック制御手段7と、スロットル開度フィードバック制御手段7から出力される操作量に比例した電圧をモータ20へ出力するPWM駆動手段8から成るスロットル制御部4を備えたエンジンの制御装置。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジンとモータジェネレータとの間に第1クラッチを、モータジェネレータと駆動輪との間に第2クラッチを有するハイブリッド車両において、内燃エンジンの過回転を確実に防止し得る制御装置を提供する。
【解決手段】内燃エンジン1とモータジェネレータ2との間のトルク伝達を断接する第1クラッチ4と、モータジェネレータ2と駆動輪7との間のトルク伝達を断接する第2クラッチ5と、を備えるハイブリッド車両の制御装置であって、実エンジン回転速度が目標エンジン回転速度を超えた場合に、内燃エンジン1のトルクをドライバの要求に応じたドライバ要求トルクより小さいトルクに減少補正する過回転防止制御手段21を備え、過回転防止制御手段21は、内燃エンジン1のトルクの減少補正量を、第1クラッチ4及び第2クラッチ5の両方が締結しているか否かに応じて切り替える。
(もっと読む)
舶用機関の制御方法及びその制御装置
【課題】 燃料セーブモードと通常モードとを効率よく切り換えて、燃料効率を向上させながら操船性を維持する。
【解決手段】 コントローラ4には、設定回転数と、実回転数とが、入力され、通常モードにおいて、設定回転数と実回転数との差から舶用機関2の燃料供給手段への出力値をPID制御器12が算出する。PID制御器12は、通常モードに比べて単位時間当たりの出力値の変更幅を小さくする燃料セーブモードも有している。設定回転数及び実回転数の変動を監視する検出部20、22、24、26、28を備え、燃料セーブモードにおいて、設定回転数または実回転数が所定範囲を超えたとき、これら検出部の出力によってPID制御部12が通常モードに切り換えられる。
(もっと読む)
舶用機関の制御方法及びその制御装置
【課題】 燃料セーブモードと通常モードとを効率よく切り換えて、燃料効率を向上させながら操船性を維持する。
【解決手段】 コントローラ4には、設定回転数と、実回転数とが、入力され、通常モードにおいて、設定回転数と実回転数との差から舶用機関2の燃料供給手段への出力値をPID制御器12が算出する。PID制御器12は、通常モードに比べて単位時間当たりの出力値の変更幅を小さくする燃料セーブモードも有している。設定回転数及び実回転数の変動を監視する検出部20、22、24、26、28を備え、燃料セーブモードにおいて、設定回転数または実回転数が所定範囲を超えたとき、これら検出部の出力によってPID制御部12が通常モードに切り換えられる。
(もっと読む)
舶用機関の制御方法及びその制御装置
【課題】 燃料セーブモードと通常モードとを効率よく切り換えて、燃料効率を向上させながら操船性を維持する。
【解決手段】 コントローラ4には、設定回転数と、実回転数とが、入力され、通常モードにおいて、設定回転数と実回転数との差から舶用機関2の燃料供給手段への出力値をPID制御器12が算出する。PID制御器12は、通常モードに比べて単位時間当たりの出力値の変更幅を小さくする燃料セーブモードも有している。設定回転数及び実回転数の変動を監視する検出部20、22、24、26、28を備え、燃料セーブモードにおいて、設定回転数または実回転数が所定範囲を超えたとき、これら検出部の出力によってPID制御部12が通常モードに切り換えられる。
(もっと読む)
速度制限装置
【課題】カーナビゲーションシステムを搭載していない車両であっても、自車走行路の制限速度を認識し、自車両の速度が制限速度を超えた場合、運転者に速度超過を知らせて制限速度内での運転を促すことができるようにする。
【解決手段】車速Sと前方認識カメラ1で撮像した画像に基づいて認識した速度標識31に表示されている制限速度Srを検出し、この車速Sと制限速度Srとの速度差ΔSを算出し(S13)、この速度差ΔSをパラメータとしてアクセル感度ゲインGaccを設定する(S14)。そして、このアクセル感度ゲインGaccでアクセル開度θaccを補正して疑似アクセル開度θahを求め、この疑似アクセル開度θahとエンジン回転数Neとに基づいて目標スロットル開度θeを設定する。
(もっと読む)
車両の制振制御装置
【課題】 通常の制振制御に復帰したときのハンチングの発生を抑制することで制振制御の実行頻度の向上を図ることが可能な車両の制振制御装置を提供すること。
【解決手段】 車体バネ上振動を抑制するような補正トルクを算出し、制駆動トルク発生手段に対し補正トルク指令値を出力するにあたり、補正トルクの振幅が所定振幅以上の状態が所定時間継続しているときは、通常時補正トルク指令値よりも小さな値のハンチング時補正トルク指令値を出力し、その後、補正トルクの振幅が所定振幅以下となる状態が第1の所定時間継続したときは、補正トルク指令値の出力をハンチング時補正トルク指令値から通常時補正トルク指令値に復帰させる。
(もっと読む)
自動車および内燃機関の運転停止時の制御方法
【課題】制御破綻を生じさせることなく内燃機関の回転数を低下させて内燃機関を目標クランク角に停止させる。
【解決手段】エンジン回転数Neが動力分配統合機構やモータなどからなる駆動系が共振する共振回転数帯を含む回転数範囲として閾値Nref2以上で閾値Nref1未満の共振含有範囲内のときには、エンジン回転数Neが共振含有範囲外のときに用いる通常の値k1より小さな値k2の比例ゲインkpを用いてエンジン回転数Neが目標回転数Ne*となるようフィードバック制御する(S220〜S280)。これにより、駆動系の共振によりエンジン回転数Neと目標回転数Ne*との差が想定より大きくなったり小さくなったりするのを抑制し、モータの出力トルクとエンジン回転数Neとにハンチングが生じてフィードバック制御が阻害されるのを抑制することができる。
(もっと読む)
自動車
【課題】内燃機関の回転数を低下させて内燃機関を目標クランク角に停止させる。
【解決手段】エンジンを停止するときに、エンジン回転数Neがエンジンの回転に伴って生じるトルク脈動によってエンジン回転数Neに大きな影響を及ぼす回転数の上限としての閾値Nref未満に至るまでは比例項と積分項とを用いたフィードバック制御によりエンジンが目標回転数Ne*で回転するようモータを制御し(S160)、エンジン回転数Neが閾値Nref未満に至った以降は比例項は用いずに積分項だけを用いたフィードバック制御によりエンジン目標回転数Ne*で回転するようモータを制御する(S170)。これにより、エンジン回転数Neが閾値Nref未満に至った以降にエンジンのトルク脈動がエンジン回転数Neに大きく影響を及ぼすことになってもエンジン回転数Neを目標回転数Ne*に制御してエンジンを停止することができる。
(もっと読む)
車両の制御装置
【課題】SOCを目標に近づけつつ、燃費を向上させることが可能なハイブリッド車両の制御装置を提供する。
【解決手段】ハイブリッド車両の制御装置は、ハイブリッド車両に搭載され、内燃機関と、回転電機と、蓄電手段と、変速部と、フィードバック制御手段と、制御手段と、を備える。蓄電手段は、回転電機へ電力を供給すると共に、回転電機の回生電力を充電する。フィードバック制御手段は、蓄電手段の蓄電状態に対応する状態量を、所定のフィードバックゲインに基づきフィードバック制御する。制御手段は、内燃機関のトルクを高め、駆動力を調整するため回転電機によって発電させる場合において、内燃機関のトルクが最適燃費動作線上のトルクよりも低い場合のフィードバックゲインを、内燃機関のトルクが最適燃費動作線上のトルクよりも高い場合のフィードバックゲインよりも大きくする。
(もっと読む)
パワーテイクオフ装置
【課題】単一のPIDゲインでは対応が困難である場合でも、複数のソフトウェア及び複数種類のハードウェアを必要とすることなく、単一のソフトウェアとハードウェアにより対応することが出来るパワーテイクオフ装置の提供。
【解決手段】燃料噴射量を制御する制御装置(10)を備え、制御装置(10)は、目標エンジン回転速度と実際のエンジン回転速度の偏差に基づいて燃料噴射量を制御するためのPIDゲインを決定する決定ユニット(14)と、記憶ユニット(13)と、診断ユニット(16)と、PIDゲインが適正でない場合に記憶ユニット(13)に記憶されている他のPIDゲインを選択して切り替える切替ユニット(17)を有している
(もっと読む)
加速度制御装置
【課題】アダプティブクルーズ制御装置に用いられる加速度制御装置において、過渡状態における自車両の乗り心地を向上させること。
【解決手段】FBトルクゲイン補正部31は、自車両の走行状態が、走行中状態から停止直前状態、もしくは停止中状態から発進直後状態へと切り替わると、FBトルクゲインを第2設定値に変更する。これと共に、その停止直前状態、もしくは発進直後状態である間、FBトルクゲインを第2設定値に維持する。この第2設定値は、第1設定値よりも小さな値であるため、FBトルクゲインが第1設定値から第2設定値へと切り替えられると、FBトルク制御部30によって実行されるフィードバック制御についての応答遅れが大きくなる。これにより、過渡状態である場合のFB制御量は、時間の進行に対して緩やかに変更され、FB制御によって発生される制動トルクや駆動トルクが大きく変化することを防止できる。
(もっと読む)
前後加速度制御装置
【課題】推定勾配トルクの算出精度が低下しても、フィードフォワード制御の精度の低下を抑制できるようにする。
【解決手段】推定勾配信頼度を演算すると共に、この推定勾配信頼度に応じてフィードバックトルクを補正する。推定勾配信頼度が低ければフィードバック制御器3fのゲインが高くなるようにすることができ、推定勾配信頼度に応じた補正後フィードバックトルクを演算することができる。したがって、推定勾配トルクの信頼度が低下し、フィードフォワードトルクの精度が低下しても、推定勾配信頼度に応じてフィードバックトルクを補正することにより、フィードフォワードトルクの精度低下を補完することが可能となる。よって、推定勾配トルクの算出精度が低下しても、総合的に、フィードフォワード制御の精度の低下を抑制できる。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】電気式差動部を備える車両用動力伝達装置において、全体効率を一層向上して燃費向上を図る。
【解決手段】差動部11を備える動力伝達装置10の電子制御装置80において、電気パス効率の変化可能量とエンジン動作点の変化可能量とに基づいて、車両のシステム効率が最大となるように、電気パス効率及びエンジン動作点が変化させられるので、例えばエンジン8の暖機状態、第3電動機M3の温度状態などの車両状態に基づいて変化可能量が変えられる電気パス効率及びエンジン動作点に合わせて車両のシステム効率が可及的に向上させられる。よって、システム効率を一層向上して燃費向上を図ることができる。
(もっと読む)
エンジン制御装置
【課題】クラッチ位置検出センサーに異常が発生しても適正なエンジン制御が可能となるエンジン制御装置の提供を目的とする。
【解決手段】エンジン10を制御する制御手段であるECU43を具備するエンジン制御装置40であって、クラッチ20が動力を伝達する状態における最小の動力Wを第一設定値として設定され、クラッチ20が動力を伝達しない状態における最大の動力Wを第二設定値として設定され、クラッチ20が動力を伝達する状態かつ動力Wが第二設定値以下である状態が所定時間以上継続する場合、または、クラッチ20が動力を伝達しない状態かつ動力Wが第一設定値以上である状態が所定時間以上継続する場合には、クラッチ位置検出センサー41が異常であると判定することを特徴とするものである。
(もっと読む)
1 - 20 / 96
[ Back to top ]