
Fターム[3G093FA09]の内容
車両用機関又は特定用途機関の制御 (95,902) | 制御部の特徴 (6,324) | 演算部内での処理 (5,972) | 帰還制御 (2,284) | 学習 (189)
Fターム[3G093FA09]に分類される特許
1 - 20 / 189
ハイブリッド車両の制御装置
評価表示システム、方法およびプログラム
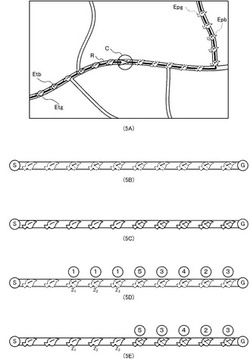
【課題】今回の走行区間における走行効率の評価と過去の走行効率の評価とを運転中に容易に比較することが可能な技術の提供。
【解決手段】表示部に車両の現在位置とともに当該現在位置の周辺の地図を表示し、車両の今回の走行における単位区間毎の走行効率と達成目標とを比較した結果を今回効率評価として取得し、今回の走行よりも過去の走行における単位区間毎の走行効率と達成目標とを比較した結果を過去効率評価として取得し、地図上に単位区間毎の今回効率評価と過去効率評価とを併せて表示する。また、今回効率評価が過去効率評価よりも改善した場合、達成目標をより高い目標に修正する。
(もっと読む)
内燃機関の制御装置

【課題】自動停止時のピストン位置の適切な位置に調整して速やかな再始動を実現することができる内燃機関の制御装置を提供する。
【解決手段】内燃機関1の自動停止を行うために燃料噴射弁4からの燃料噴射が停止された後、スロットルバルブ13が全閉時よりも開き側の値である目標開度に調整される。この目標開度を開き側の値に設定するほど、上記自動停止により機関回転が停止したときに吸気行程となる気筒において、ピストン6が吸気上死点寄りの位置で停止するようになる。こうしたことを考慮して、上記目標開度は、上記自動停止により機関回転が停止したときに吸気行程となる気筒において、ピストン6が同吸気行程の中間付近から吸気上死点までの範囲に停止する値に設定される。
(もっと読む)
ハイブリッド車のアイドリング学習装置
【課題】機械的機構の歯打ちなどによる異音の発生を抑制するために電動機からトルクを出力しているときでも、より適正な内燃機関のアイドリング運転時の制御量を学習する。
【解決手段】アイドリング学習条件が成立してアイドリング制御量を学習する際には、モータMG2から押し当てトルクTadを出力しているときには、押し当てトルクTadが大きいほど大きくなる傾向に補正空気量Qadを設定し(S130)、この補正空気量Qadをアイドリング運転時における吸入空気量Qaに加算することによる補正を施してアイドリング空気量Qidlを計算し(S150)、アイドリング空気量Qidlを含むアイドリング制御量を学習する(S160)。これにより、プラネタリギヤの歯打ちなどによる異音の発生を抑制するための押し当てトルクTadをモータMG2から出力しているときでも、より適正なアイドリング制御量を学習することができる。
(もっと読む)
車両用情報処理装置及び車両用情報処理方法
【課題】先行車両との車間距離を測定する手段を有して車両用情報の処理を行うに、先行車両との車間距離に対するドライバ自身の認識レベルをより明確に把握することを可能とする車両用情報処理装置及び車両用情報処理方法を提供する。
【解決手段】車両用情報処理装置は、先行車両との車間距離を測定する手段を有して車両用情報の処理を行う。車両用情報処理装置は、車両のアクセルペダルがオフ操作された時の先行車両との車間距離であるアクセルオフ車間距離と、このアクセルペダルのオフ操作に引き続き車両のブレーキペダルが踏み込み操作された時の先行車両との車間距離であるブレーキオン車間距離とをそれぞれ関連付けして記憶する手段を備える。
(もっと読む)
作業機のエンジン回転速度制御装置
【課題】エンジンの回転速度を設定回転速度に維持するエンジン回転速度制御装置において、高負荷時におけるエンジンの出力を抑えて作業機の破損を防止する。
【解決手段】作業負荷に拘わらずにエンジンの回転速度を設定回転速度に維持する作業機のエンジン回転速度制御装置であって、作業負荷によってエンジンの回転速度が低下した場合に、当該エンジンの回転速度を設定回転速度に復帰させるべく増速出力を行ない、この増速出力の後、所定時間経過してもエンジンの回転速度が設定回転速度に復帰しない場合には、設定回転速度を所定量だけ減算処理して再設定する構成とする。また、再設定前の設定回転速度と現時点でのエンジン回転速度との差に応じて、再設定のための減算量を決定する構成とする。
(もっと読む)
作業機械
【課題】油圧ポンプの個体差に起因した油圧ポン吸収トルクのばらつきによって生じる作業機械毎の作業量のばらつきを抑制する。
【解決手段】第2の学習モードスイッチがオンされて第2の学習が指示され、第2学習制御条件が成立し、かつ、その他所定の条件が整うと、油圧ポンプの個体差によって生じる油圧ポンプの傾転のばらつきを是正するための補償指令圧ΔPcompを算出して記憶する。そして、通常の作業時に、補償指令圧ΔPcompを用いた補正された駆動電流iを電磁比例減圧弁4に出力する。
(もっと読む)
車両のシフト誤操作検出装置
【課題】後退レンジへのシフト誤操作を検出するシフト誤操作検出装置において、車両が停止状態から段差を乗り越えて後退させる場合等のように、運転者の意思で後退レンジに切り換えてアクセルを大きく踏み込んで車両を後退させる場合に、後退レンジへのシフト誤操作と間違って判定されることを防止できるようにする。
【解決手段】Rレンジへの切り換え後に、アクセルセンサ14の検出値に基づいてアクセル踏み込み操作及びアクセル戻し操作の挙動を学習すると共に、Rレンジへの切り換え後にアクセルセンサ14の検出値に基づいて検出したアクセル踏み込み操作及びアクセル戻し操作の挙動をそれぞれ学習値と比較して、通常の車両後退時より急なアクセル踏み込み操作及び急なアクセル戻し操作であるか否かを判定する。その結果、通常の車両後退時より急なアクセル踏み込み操作及び急なアクセル戻し操作と判定されれば、Rレンジへのシフト誤操作と判断する。
(もっと読む)
エンジンの制御装置
【課題】燃費の悪化を最小限に抑えつつスロットル開度と吸入空気量との関係(開度-空気量特性)の変化を適正に学習することができ、エンスト防止、トルク制御精度等の向上を図ることのできるエンジンの制御装置を提供する。
【解決手段】開度-空気量特性の特性変化分を学習する学習手段と、前記学習の要否を判定する学習要否判定手段と、前記学習が必要であると判定されたとき、安定運転状態において、前記学習手段に前記学習を実行させる学習移行手段と、を備え、前記学習要否判定手段は、安定運転状態において、特性記憶手段に記憶されているそのときのスロットル弁の開度に対応する吸入空気量とエアフローセンサにより検出される実吸入空気量との乖離量を求め、該乖離量とそれについて設定された閾値とを用いて前記学習の要否を判定するようにされる。
(もっと読む)
運転支援装置及び運転支援方法
【課題】カメラ17で制限車速標識を撮像し、撮像した画像から制限車速情報を読み取ることをしなくても、地図データに示された制限速度情報を更新可能とする。
【解決手段】地図データの情報に基づき取得した走行道路の制限車速情報、及び運転者が車速変更のために操作する目標車速変更操作子の操作情報に基づき目標車速を求め、その求めた目標車速となるように車両の制駆動力を制御する。また、本発明は、上記目標車速変更操作子の操作を検出すると、上記地図データ中の制限車速切り替わり位置SPの情報を更新する。
(もっと読む)
内燃機関の制御装置
【課題】内燃機関と車両の駆動装置との結合状態を精度よく判定し、適正に内燃機関を制御することのできる内燃機関の制御装置を得る。
【解決手段】この発明による内燃機関の制御装置は、車速センサにより検出された車速と回転センサにより検出された実回転速度とスロットル開度センサにより検出されたスロットル開度とが所定の範囲である第1の条件と、車速センサにより検出された車速と回転センサにより検出された実回転速度との比率を表す実演算値が所定の状態である第2の条件とを満たしているとき、実演算値を変速ギヤに於ける基準学習値として学習する基準値学習機能を備えたものである。
(もっと読む)
ハイブリッド車両の変速制御装置
【課題】各種変速状態においてクラッチアクチュエータ作動量の学習に適した変速状態を抽出し学習を行なうことによってクラッチアクチュエータ作動量の補正精度を向上させることが可能な変速制御装置を提供する。
【解決手段】対応関係補正手段は、エンジン回転数Neと自動変速装置の入力軸回転数Niとの差の絶対値|Ne−Ni|が所定値以上であることを判定する回転差判定手段と、変速時に変速作動が完了し、且つ差の絶対値|Ne−Ni|が所定値以上であることを条件とし、クラッチアクチュエータ作動量とクラッチトルクとの対応関係において、クラッチ制御手段によってクラッチアクチュエータに作動された目標クラッチトルクに対応するクラッチアクチュエータ作動量に対応するクラッチトルクの値を推定クラッチトルク演算手段によって演算された推定クラッチトルクTesに置き換えるクラッチトルク−作動量補正手段と、を有する。
(もっと読む)
エンジン制御装置
【課題】制御量と実燃料量との関係を学習できると共に、アイドルストップ機能による燃費低減効果を軽減しないようにしたエンジン制御装置を得る。
【解決手段】コモンレール2の燃料圧と目標圧とに基づいて高圧燃料供給手段への制御量をフィードバック制御すると共に、アイドル運転のときに高圧燃料供給手段の劣化を学習し、エンジン1の自動停止及び自動始動を行う。その際、エンジンの自動停止による燃料噴射停止時に、エンジンの環境条件に基づいてアイドル運転に移行するか否かを判断し(S120)、移行したアイドル運転のときに、燃料圧と目標圧との差が小さい状態で設定時間経過し、かつ、制御量のうちの積分項の増加が大きいときには(S170:YES)、高圧燃料供給手段の劣化の学習を実行させ(S190)、積分項の増加が小さいときにはアイドルストップを実行させる(S180、S210)。
(もっと読む)
車両用表示装置
【課題】簡単な操作で学習燃費をリセットすることを可能にする車両用表示装置を提供する。
【解決手段】過去の燃料消費量および走行距離とから求めた学習燃費と、車両の燃料残存量とを用いて、現時点を基準とする航続可能距離を算出する車両用表示装置であって、学習燃費を予め定めた第2イニシャル燃費の値にリセットするリセットスイッチ手段7を有する。また、車両に搭載されたバッテリ13が、車両用表示装置に非接続の状態から接続状態に切り替わったときに、学習燃費を予め設定された第1イニシャル燃費の値にリセットする手段を有する。リセットスイッチ手段7やバッテリ13でリセットされたときには、第1または第2イニシャル燃費にリセットしてからの学習燃費を用いて、航続可能距離を算出して表示する表示装置6を有する。第1イニシャル燃費と第2イニシャル燃費は同じ値でもよい。
(もっと読む)
回生制御装置、ハイブリッド自動車および回生制御方法、並びにプログラム
【課題】電動機の回生トルクを制動力として利用する際のドライバビリティを向上させること。
【解決手段】電動機のみによる走行中の減速時に電動機の回生発電により生じる回生トルクを制動力として利用する際に、予め設定されている目標減速度と回生発電により生じる回生トルクによる実減速度とを比較する減速度比較部32と、電動機が最大の回生トルクを発生しているにも係わらず減速度比較部32の比較結果により実減速度が目標減速度以下となる状態が所定のパターンで生じたとき、今回の減速が終了した後の次回の減速時には、エンジンと電動機とが協働する走行形態とし、エンジンのエンジンブレーキと電動機の回生トルクとを共に制動力として利用する回生制御部30と、を有するハイブリッド自動車を構成する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 適切な走行シーンにおいて第1クラッチの学習補正を行うことが可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 第2クラッチをスリップ制御してモータを回転数制御しているときに、第1クラッチの締結・開放が行われる走行モードの遷移であっても、第1クラッチの締結・開放以外の要因でモータトルク変動が生じる場合には、第1クラッチの学習補正を禁止することとした。
(もっと読む)
内燃機関の燃料供給系異常診断装置
【課題】アルコール濃度学習値が本来の値から大きく乖離してしまうことを抑制するとともに、濃度学習処理の長期化によって燃料供給系の異常診断処理の実行期間が不必要に制限されることを回避して燃料供給系に異常が発生している場合にはこれを早期に診断することのできる内燃機関の燃料供給系異常診断装置を提供する
【解決手段】給油が判定された後の流入積算量が、デリバリパイプ4に燃料タンク1の燃料が供給され始める量に達してから、デリバリパイプ4の燃料が給油後の燃料に置換される量に達するまでの期間を濃度学習期間とし、同期間に限定して濃度学習処理を実行する。また、濃度学習期間を除く期間における実空燃比と理論空燃比との乖離傾向に基づいて燃料供給系の異常診断処理を実行する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 エンジンの空気量学習制御の機会を確保可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 エンジンとモータとの間に設けられた第1クラッチと、モータと駆動輪との間に設けられた第2クラッチと、を備えたハイブリッド車両の制御装置において、エンジンとモータを併用するスリップ走行モードで走行しているときに、エンジンコントローラから空気量学習制御要求が出力されたときは、第1クラッチを開放し、モータの駆動力により第2クラッチをスリップさせて走行するモータスリップ走行モードに移行した後、エンジンにおいて空気量学習制御を実行することとした。
(もっと読む)
エンジン回転停止制御装置
【課題】エンジン回転停止制御が実行されたときの実エンジン回転挙動に基づいて目標軌道情報(目標軌道の算出に用いる基準回転速度とロストルクのずれ量)を学習するシステムにおいて、目標軌道情報の誤学習を防止できるようにする。
【解決手段】前回の目標軌道情報(基準回転速度又はロストルクのずれ量)の学習値の記憶データに対して今回の目標軌道情報の学習値の算出データが所定値以上乖離した場合に、その状態が所定回数連続していないときには、何らかの外部負荷等によって目標軌道情報の学習値(算出データ)が一時的に変化した可能性があると判断して、目標軌道情報の学習値の記憶データを前回値に保持(ホールド)する。一方、その状態が所定回数連続したときには、エンジン11のフリクション等が変化して目標軌道情報の学習値(算出データ)が定常的に変化したと判断して、目標軌道情報の学習値の記憶データを更新する。
(もっと読む)
エンジン回転停止制御装置
【課題】エンジン回転停止制御が実行されたときの実エンジン回転挙動に基づいて目標軌道情報(目標軌道の算出に用いる基準回転速度とロストルクのずれ量)を学習するシステムにおいて、大気圧の変化による目標軌道の算出精度の低下を抑制する。
【解決手段】エンジン停止要求が発生したときに大気圧センサ38で大気圧を検出して、前回のエンジン停止要求時の大気圧と今回のエンジン停止要求時の大気圧との差に応じた大気圧補正量を算出し、その大気圧補正量を用いて目標軌道情報(基準回転速度とロストルクのずれ量)の学習値を補正することで、大気圧に応じて実際の目標軌道情報(目標軌道情報の真値)が変化するのに対応して、目標軌道情報の学習値を適正に補正して、目標軌道情報の学習値を真値に近付ける。この補正後の目標軌道情報の学習値を用いて目標軌道を算出することで、大気圧の変化による目標軌道の算出精度の低下を抑制する。
(もっと読む)
1 - 20 / 189
[ Back to top ]