
Fターム[3G384EB15]の内容
内燃機関の複合的制御 (199,785) | 演算処理B(制御パターン) (16,584) | 固定、一定、ホールド(保持) (314)
Fターム[3G384EB15]の下位に属するFターム
ピークホールド (83)
Fターム[3G384EB15]に分類される特許
1 - 20 / 231
内燃機関の制御装置
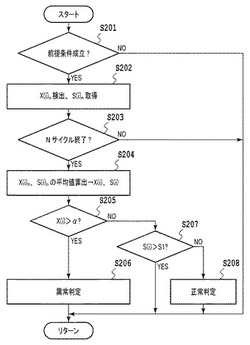
気筒間空燃比ばらつき異常検出装置
【課題】誤判定を防止して十分な検出精度を確保する。
【課題手段】本発明に係る気筒間空燃比ばらつき異常検出装置は、多気筒内燃機関における各気筒の吸気弁の作用角を可変にする作用角可変機構と、各気筒の回転変動に関するパラメータX(i)を検出し、この検出されたパラメータに基づき気筒間空燃比ばらつき異常の有無を検出する異常検出手段とを備える。異常検出手段は、パラメータの検出時における作用角Sが所定の大作用角領域にあるとき(ステップS207:イエス)には正常判定を保留し、パラメータの検出時における作用角が、大作用角領域よりも小作用角側の所定の小作用角領域にあるとき(ステップS207:ノー)には正常判定(ステップS208)を実行可能である。
(もっと読む)
ディーゼルエンジンの制御装置

【課題】手動変速機73のシフトチェンジ後における、ディーゼルエンジン1の燃焼安定性の低下を回避する。
【解決手段】制御器(PCM10)は、アクセルの全閉を含む手動変速機73のシフトチェンジプロセスが行われるときには、当該シフトチェンジプロセスの開始後、アクセルペダルが踏み込まれるまでの期間において、ディーゼルエンジン1の軸トルクが所定値以下となるような、微少の燃料を噴射しかつ当該微少燃料を燃焼させる微少噴射制御を実行する。
(もっと読む)
作業機械のエンジン制御システム
【課題】排気ガス後処理装置を正常に機能させる上で有害である排気ガス中の硫黄分を正しく測定し、排気ガス後処理装置の硫黄被毒を低減することができる作業機械のエンジン制御システムを提供する。
【解決手段】キースイッチ46がONするエンジン始動毎に、前回のエンジン停止時に記憶した燃料残量と今回のエンジン始動時に検出した燃料残量とを比較し、燃料残量が増えていた場合のみ硫黄分濃度測定処理を行う。この処理では、エンジン1の回転数を強制的に硫黄分濃度の測定に適した目標回転数Naとなるよう固定制御し、排気ガスの温度が硫黄分濃度の測定に適した所定の温度範囲Texa〜Texbとなり、目標時間Taを経過すると、硫黄分濃度が閾値以上であるかどうかの判定を行い、硫黄分濃度が閾値以上である場合に警報表示装置42を作動させる。
(もっと読む)
ディーゼルエンジンの制御装置
【課題】手動変速機73のシフトアップ後における、ディーゼルエンジン1の燃焼安定性の低下を回避する。
【解決手段】エンジン1が完全暖機する前の運転状態において、燃料噴射弁(インジェクタ18)は、拡散燃焼を主体とした主燃焼を行うために圧縮上死点又はそれよりも前に燃料噴射を開始する主噴射と、主燃焼の開始前に前段燃焼が生起するように、主噴射よりも前のタイミングで少なくとも1回の燃料噴射を行う前段噴射と、を実行し、EGR手段(排気ガス還流通路50、排気ガス還流弁51a、クーラバイパス弁53a)は、エンジンの運転状態に応じたEGR量の排気還流を実行する。EGR手段はまた、アクセルの全閉とクラッチ(クラッチ機構72)の開放とを伴う変速機73のシフトアッププロセスの最中に、当該シフトアッププロセスの開始直前のEGR量を保持する。
(もっと読む)
制御装置、制御方法及びプログラム
【課題】制御系の動作を確保しつつ、アイドルストップ機能を動作させる。
【解決手段】バッテリー80の出力電圧が低下し、制御ユニット11が、シフト位置検出ユニット20の接点21〜24、及びブレーキ状態検出ユニット30の接点31がオンであるか、オフであるかを判定することが困難になった場合には、予め記憶されていた情報に基づいて、制御信号を生成し出力する。これにより、制御ユニット11は、バッテリー80の出力電圧が低下したとしても、制御系100の動作を継続して行うことができる。また、バッテリー80の出力電圧が低下したとしても、制御系100の動作を継続して行うことができるので、アイドルストップ機能による動作を必要に応じて行うことができる。これにより、車両の燃費を向上させることができる。
(もっと読む)
蓄圧式燃料噴射装置
【課題】アイドル運転が行われなくても、調量弁の特性学習を行うことができる蓄圧式燃料噴射装置を得る。
【解決手段】内燃機関1の停止に基づく回転数降下中に(S100)、調量弁14を予め設定された一定の弁開度に制御してコモンレール2に高圧燃料を供給する(S130)。そして、燃料圧センサ7によりコモンレール2の燃料圧を検出して、回転数降下中の燃料圧の降下速度を測定する(S140)。内燃機関1の回転数降下速度が予め設定された基準内で(S150)、かつ、燃料圧降下速度が予め設定された基準圧力降下速度よりも早いときには(S170)、調量弁14を供給増量側に補正し(S180)、基準圧力降下速度よりも遅いときには(S190)、調量弁14を供給減量側に補正する学習を行う(S200)。
(もっと読む)
内燃機関の可変バルブタイミング制御装置
【課題】中間ロック機構付き可変バルブタイミング制御システムのロック要求時に保持デューティ学習値がずれていた場合にロック完了までの時間が長くなることを抑制する。
【解決手段】ロック要求が発生したときにVCT位相を一旦中間ロック位相を所定量だけ通り越したロック前位相まで移動させるロック前位相制御を行ってから、VCT位相を中間ロック位相へ向けて戻しながらロックピン58を突出させるロックピン突出制御を行ってロックピン58によりVCT位相を中間ロック位相でロックする。その際、ロック前位相制御中に、保持デューティ学習実行条件を緩和して、通常の保持デューティ学習よりも早く保持デューティを学習できる条件に変更して保持デューティを学習することで、保持デューティ学習値を補正する保持デューティ学習値補正を行い、この保持デューティ学習値補正により補正された保持デューティ学習値に基づいて油圧制御弁25を制御する。
(もっと読む)
内燃機関の制御装置
【課題】学習頻度が少なくとも、アイドル運転時のスロットル開度の学習を精度良く行うことのできる内燃機関の制御装置を提供する。
【解決手段】燃焼状態が悪化していないときには(S101:NO)、スロットル開度の学習に係る学習値として第1の学習値の更新を行い(S106)、燃焼状態が悪化しているときには(S101:YES)、スロットル開度の学習に係る学習値として第2の学習値の更新を行う(S103)とともに、アイドル運転時のスロットル開度制御に使用する学習値を燃焼状態に応じて使い分けることで、学習頻度が少なくとも、アイドル運転時のスロットル開度の学習を精度良く行えるようにした。
(もっと読む)
エンジンの燃料供給装置
【課題】燃圧センサの故障時であっても、要求よりも実際の燃料噴射量が不足してリーン空燃比で運転されてしまうことを抑制できるようにする。
【解決手段】燃圧センサで検出された燃圧と目標値とに基づいて燃料ポンプの通電を制御するデューティ比を決定するエンジンの燃料供給装置において、前記燃圧センサの異常時に、燃料ポンプのデューティ比を前記目標値に相当する値に固定すると共に、前記目標値に相当するデューティ比で燃料ポンプを駆動する状態において、燃料供給量が不足する惧れがある高負荷時には、燃料カットを行うか、スロットル弁の開度を制限する。
(もっと読む)
パルス信号検出方法、パルス信号検出回路、内燃機関の点火装置およびプログラム
【課題】安価なマイコンを用いて正確なタイミングを得る。
【解決手段】パルス信号検出方法は、被検出パルス信号の第1被検出パルスP3を検出する第1のステップと、第1被検出パルスが検出された後に、実行中の処理を中断して割り込み処理を開始する第2のステップと、割り込み処理を用いて、タイマ21からタイマ値を第1検出タイマ値T1として取得する第3のステップと、取得された第1検出タイマ値に所定の第1出力時間D1を加算して、その加算結果から、第1被検出パルスが検出されたタイミングと第1検出タイマ値が取得されたタイミングとの差である、予め求められた誤差時間E1を減算した第1目標タイマ値C1を計算する第4のステップと、タイマのタイマ値が第1目標タイマ値に達したか否か判定する第5のステップと、タイマのタイマ値が第1目標タイマ値に達した時に、第1出力信号を出力する第6のステップと、を含む。
(もっと読む)
燃料供給装置
【課題】燃料ポンプの消費電力を低減することの可能な燃料供給装置を提供する。
【解決手段】燃料ポンプ2と燃料噴射弁11とを接続する燃料通路9にレギュレータ3が設けられる。レギュレータ3は、下流側燃料通路13の燃料圧力が制御圧P3より低いとき燃料通路9を開放し、下流側燃料通路13の燃料圧力が制御圧P3より高いとき燃料通路9を閉塞する。ECU5は、圧力検出器4の検出した燃料圧力が第1設定圧P1より大きくなると燃料ポンプ2の駆動を停止し、第2設定圧P2より小さくなると燃料ポンプ2を駆動する。第1設定圧P1、第2設定圧P2、制御圧P3は、P1>P2≧P3の関係にある。これにより、燃料ポンプ2から燃料通路9に圧送された燃料は、燃料タンク8に戻されることなく、燃料噴射弁11に供給されるので、燃料ポンプ2の停止時間を長くすることができる。
(もっと読む)
内燃機関の制御装置
【課題】ケースの内圧の一時的な変化した場合であっても、大気圧計測センサの異常を誤判定することのない内燃機関の制御装置を提供する。
【解決手段】この発明による内燃機関の制御装置は、制御パラメータの一部に大気圧を用いて内燃機関を制御する制御回路と、前記大気圧を計測する大気圧計測センサと、前記制御回路のうちの少なくとも一部と前記大気圧計測センサを収納するケースと、前記大気圧計測センサが計測した大気圧計測値に基づいて前記大気圧計測センサの異常を判定する大気圧計測センサ異常判定手段とを備え、前記大気圧計測センサ異常判定手段を、前記大気圧計測値の単位時間当たりの変化量が所定値より大きく、かつ前記変化量が前記所定値より大きい状態が所定時間以上継続したとき、前記大気圧計測センサが異常であると判定するように構成したことを特徴とする。
(もっと読む)
動力取出機構装備車のエンジン制御装置
【課題】動力取出機構を装備した作業車両の制御装置において、半導体記憶素子(ROMやRAM)等の故障に起因するエンジンの制御モードの異常を診断すると共に、異常時における適正な処置を可能とする。
【解決手段】エンジン制御装置において、第1のエリアにおいてエンジン制御モードを選択し、エンジンの制御に供するとともに、第2のエリアにおいては、第1のエリアとは別に、エンジン制御モードを判断し、これを、第1のエリアのエンジン制御モードと比較し、異なる場合にはエンジン制御をリンプホームモードへ移行する等の安全措置を講ずる。
(もっと読む)
エンジン保護制御装置
【課題】エンジンの始動時に於ける急激な高回転をなくし、潤滑油の供給量不足によるエンジンの焼き付き及び破損を防止する。
【解決手段】コントローラ14によりスロットルボリューム12の設定電圧値を演算して目標回転数となるようにエンジン11の運転を制御するエンジン保護制御装置において、前記エンジン11の潤滑油の圧力を計測する潤滑油圧力検出手段17を備え、エンジン始動時には前記コントローラ14の指令信号により前記エンジン11をアイドルモードで始動させ、前記潤滑油圧力検出手段17による計測値が規定値よりも高くなった場合には前記アイドルモードを解除するように構成した。
(もっと読む)
ハイブリッド車両の制御装置
【課題】専用の大気圧センサを別個に設けることなく、高精度に大気圧を推定できるハイブリッド車両の制御装置を得ること。
【解決手段】内燃機関1とモータを備えるハイブリッド車両の制御装置であって、大気圧補正が必要と判断される場合には、大気圧推定モードに移行する。大気圧推定モードでは、スロットル開度を予め設定された大気圧推定用スロットル開度TVOpaに保持すると共に、該スロットル開度の保持により内燃機関1に発生するトルクの過不足をモータにより補償しながら大気圧推定を実行する。
(もっと読む)
空気流量測定装置の劣化判定装置及び劣化判定方法
【課題】より正確にAFM3の汚損による特性劣化を判定するAFM劣化判定装置1を提供する。
【解決手段】AFM劣化判定装置1は、判定時に、内燃機関の運転状態を、空気流量が所定の流量以上となる高流量域(汚損判定可能流量域)の所定流量となる運転状態に維持して、その運転状態におけるAFM3の測定流量から測定誤差を算出し、測定誤差に基づいて特性劣化の度合を判定している。これによれば、AFM3の測定誤差によって、汚損劣化に起因する測定誤差の度合を判定することができる。
(もっと読む)
内燃機関の制御装置
【課題】瞬断が発生しても、その解消後の電動アクチュエータの動作位置の推定精度を向上させることができ、瞬断後も機関状態量の制御を好適に継続することのできる内燃機関の制御装置を提供する。
【解決手段】ECU4は、EDU203の通電が瞬断されたときに、その直前における電動アクチュエータ2の動作位置を記憶するとともに、瞬断直前の電動アクチュエータ2の動作状況に応じて瞬断中の電動アクチュエータ2の動作量を推定する。またECU4は、記憶した瞬断直前の電動アクチュエータ2の動作位置を、推定した瞬断中の電動アクチュエータ2の動作量にて補正することで、瞬断解消時の電動アクチュエータ2の動作位置を推定する。
(もっと読む)
アイドルストップ車両の触媒温度推定装置
【課題】アイドルストップが行われる場合にも、凝縮水の影響を考慮して、触媒温度を正確に推定できるようにする。
【解決手段】機関始動時からの吸気流量を積算して吸気流量積算値SUMQIを算出する(S12)。アイドルストップ中は、所定時間ΔTが経過するまで蒸発水が新たに発生(増加)しないと判断して、吸気流量積算値SUMQIをアイドルストップ開始時の値に保持し(S15)、所定時間ΔTが経過すると吸気流量積算値SUMQIを0にリセットする(S14)。吸気流量積算値SUMQIが判定値SQASLを超えているときには、蒸発水が既に蒸発していると判断し、触媒温度に関連する車両運転状態に応じて触媒温度を推定し(S17)、判定値SQASL以下であれば、蒸発水が残存していると判断して、触媒温度を外気温相当値に保持する(S18)。
(もっと読む)
車両用制御システム
【課題】電子制御装置(ECU)が自身に接続された各車両部品にノードIDを付与可能にする。
【解決手段】制御システム1は、圧力センサ11及び通信ドライバ15を内蔵する気筒毎のインジェクタ(INJ)10と、各INJ10の通信ドライバ15に共通の通信線LCを介してバス接続されたECU20とを備え、圧力センサ11からの信号はINJ10毎のセンサ線LSを介しECU20に入力される。本システム1では、ECU20から全INJ10に対する特定の命令が送信されると、各INJ10は自身のセンサ線LSの電圧を0Vからスイープさせ、ECU20は、各センサ線LSの電圧が、該線LSにつながるINJ10に付与するノードIDに対応した電圧になると、該線LSを0Vに変化させる。そして、各INJ10は、自身のセンサ線LSの電圧が0Vに変えられた直前の該線LSの電圧から、自身に付与されたノードIDを特定し該ノードIDを記憶する。
(もっと読む)
1 - 20 / 231
[ Back to top ]