
Fターム[3J027GC06]の内容
減速機 (22,699) | 遊星歯車機構の形式(デフは除く) (3,273) | 伝動中心軸が遊星歯車内 (992) | 調和駆動型(ハーモニック) (233)
Fターム[3J027GC06]の下位に属するFターム
カップ状フレクススプライン (61)
フラット型ハーモニック (51)
Fターム[3J027GC06]に分類される特許
1 - 20 / 121
回転数変換装置、およびそれを用いた電気機械装置、アクチュエーター、ロボット、ロボットハンド
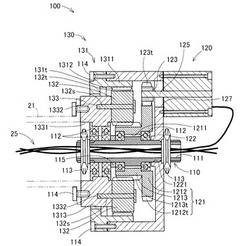
【課題】回転数変換装置、電気機械装置を小型化する技術を提供する。
【解決手段】回転数変換装置であって、導電線を通過させる中空部を有する中心軸と、前記中心軸の周りに配置され、回転中心が前記中心軸からずれており、外部の駆動装置の駆動軸が接続可能な第1の歯車と、前記第1の歯車と咬み合う入力部を有し、回転中心が前記中心軸と同心である回転数変換機構と、前記第1の歯車と、前記回転数変換機構と、を内部に格納し、前記第1の歯車の回転中心の延長上に前記外部の駆動装置の駆動軸を通過させる開口部を有するケーシングと、を備え、前記ケーシングは、前記ケーシングの外周を前記中心軸と平行な方向に延長した仮想的な筒形状の内部に前記外部駆動装置が収まるように、前記外部駆動装置が接続されるケーシングである、回転数変換装置。
(もっと読む)
電気機械装置およびそれを用いたアクチュエーター、モーター、ロボット、ロボットハンド。

【課題】電気機械装置を小型化する技術を提供する。
【解決手段】中心軸110と、前記中心軸の外周に沿って配置されたローター磁石123を有し、前記中心軸と前記ローター磁石との間において少なくとも前記中心軸の軸方向の一方に開口した収納空間を有するローター121と、前記ローターの外周に配置されたステーター122と、前記収納空間に配置され、前記ローターと一体に構成された回転数変換機構130と、前記ステーターの内側に配置され、前記回転数変換機構と回転負荷とを接続する負荷接続部133と、前記ステーターと前記負荷接続部との間に設けられたクロスローラーベアリング137とを備える。
(もっと読む)
駆動装置
【課題】潤滑が必要な部分へのグリースの供給とモータ内へのグリースの浸入の防止とを両立し、波動歯車装置からの出力軸を上向きとした駆動装置を得ること。
【解決手段】波動歯車装置10と、モータ軸61を取り囲む溝状であり波動歯車装置10から流下したグリース8を貯留する第1グリース溜まり52と、第1グリース溜まり52を取り囲む溝状であり第1グリース溜まり52から溢れたグリース8を貯留する第2グリース溜まり53とを有し、モータ軸61を上に向けたモータ6を波動歯車装置10の下に位置決めするモータスペーサ5と、下方が窄まった円筒状の円筒部41を有し、ウェーブジェネレータ3とモータスペーサ5との間でモータ軸61に固定され、モータ軸61とともに回転するグリース循環リング4とを備える。
(もっと読む)
撓み噛合い式歯車装置
【課題】起振体軸受にころを用いながらスキューを防止し、伝達トルクのロスの低減を可能とする。
【解決手段】起振体104と、外歯歯車120と、起振体軸受110と、減速用内歯歯車130Aと、出力用内歯歯車130Bと、を備えた撓み噛合い式歯車装置100において、起振体104に起振体軸受110を組み込む前のころ116A、116Bと外輪118A、118Bとの間に、ころ116A、116Bの軸方向Oの端部に向かって増大する隙間Gpが設けられ、その隙間Gpの大きさは起振体104に起振体軸受110を組み込んだ状態での外輪118A、118Bの変形量以上とされている。
(もっと読む)
ロボット
【課題】稼働率の低下や維持コストの増加を招くことなくロボットの波動歯車減速機の良好な動作を長期間にわたって維持する。
【解決手段】ロボットは、ウェーブジェネレータとサーキュラスプラインとフレクスプラインとを含む波動歯車減速機と、波動歯車減速機における中心軸付近にグリスを供給するグリス供給部と、波動歯車減速機の外周付近において供給されたグリスを回収するグリス回収部と、を備える。
(もっと読む)
撓み噛合い式歯車装置及びそれに用いられる外歯歯車等の製造方法
【課題】外歯歯車を構成する外歯の変形の影響を低減可能とする。
【解決手段】起振体104と、外歯歯車120と、減速用内歯歯車130Aと、出力用内歯歯車130Bと、を備えた撓み噛合い式歯車装置100において、外歯歯車120が減速用内歯歯車130A、出力用内歯歯車130Bの内歯128A、128Bとそれぞれ噛合する第1、第2外歯124A、124Bを互いの歯筋方向Yに隣接して備え、第1、第2外歯124A、124Bはそれぞれ、歯筋方向Yに隣接する外歯に対向する内端部IEと内端部IE以外の中央部Cとを有し、内端部IEの歯丈h1が中央部Cの歯丈h2よりも小さくされている。
(もっと読む)
減速機構、ロボット用の関節装置
【課題】小型化及び高出力化を実現可能な減速機構を、提供することにある。
【解決手段】
本減速機構は、入力部材40と出力部材50とを、備えている。入力部材40は、第1回転中心O1を中心として揺動する。入力部材40は、出力部40bを有している。出力部40bは、第1回転中心O1から所定の距離d1を隔てた位置に設けられている。出力部材50は、入力部材40の揺動に応じて、第2回転中心O2を中心として揺動する。第2回転中心O2は、第1回転中心O1から所定の間隔を隔てた位置に配置されている。出力部材50は、係合部50bを有している。係合部50bは、入力部材40の出力部40bが係合する部分である。
(もっと読む)
波動歯車装置を備えたアクチュエータの位置決め装置
【課題】スライディングモード制御により波動歯車装置の非線形特性を補償するアクチュエータの位置決め装置を提案すること。
【解決手段】位置決め装置のスライディングモード制御器は、位置指令θl*、制御対象を表す状態変数xを入力として制御対象への制御入力uを生成する。制御対象は次式で規定する。
スライディングモード制御系の切換面は設計変数Sで規定する。
制御入力uは、σを切換関数、kを切換ゲイン、として、線形状態フィードバック制御項ulと非線形制御入力項unlの和である。 (もっと読む)
(もっと読む)
駆動装置
【課題】機械的な回転駆動を伴わずに可撓性環状体に撓み変形を生起させることにより、装置構成を簡単かつ小型化してメンテナンス工数を減らすことができるとともに作動時における機械的振動を抑えることができる駆動装置を提供する。
【解決手段】駆動装置100は、円筒状のハウジング101の内側に磁性体で構成された可撓性環状体103を回転不能な状態で固定的に備えている。可撓性環状体103の外側には、ハウジング101の内周面上にステータ102a〜102fが設けられている。ステータ102a〜102fは、電磁石で構成されており可撓性環状体103に径方向への撓み変形を周方向に沿って連続的に生じさせる。可撓性環状体103の内側には、軸状に形成された従動体105が配置されている。可撓性環状体103の内周面および従動体105の外周面には、可撓性環状体103が撓み変形した際に互いに噛合う内歯104および外歯106が形成されている。
(もっと読む)
波動歯車減速機の角度伝達誤差補正方法及び装置
【課題】 動的な状態下で周方向の全域に亘り回転角度誤差を一様に抑える。
【解決手段】 駆動モータ6により波動歯車減速機5を介してブランケットロール1を回転駆動するときに、波動歯車減速機5の角度伝達誤差を検出し、それを高速フーリエ変換して得られる空間周波数の第1周波数から第4周波数に対応するsin関数を用いて、波動歯車減速機5の周期性誤差波形を近似した仮の補正式を立てる。次に、仮の補正式で補正して得られる波動歯車減速機5の角度伝達誤差の波形における振幅及び位相の波動歯車減速機5の出力側の回転角度に依存したぶれに関する修正を、仮の補正式における空間周波数の第1周波数に対応するsin関数に加えて、補正式を求める。ブランケットロール1の目標とする回転角度について、求めた補正式で補正を加え、補正された目標回転角度が得られるように、駆動モータ6を駆動させる。
(もっと読む)
ステアバイワイヤ式操舵装置およびそれを備えた車両
【課題】 各輪の操舵を独立させた独立操舵系で、広角転舵を実現でき、かつコンパクトな構成とできるステアバイワイヤ式操舵装置、および車両を提供する。
【解決手段】 転舵軸13と同軸上に固定ギア16を固定し、それにかみ合うよう外周面にギヤを形成したナット17を配置する。ナット17と軸18の対向面の螺旋溝にボールを介在させたボールナット機構20を設ける。転舵アクチュエータ10による回転運動を、ナット17の直線運動に変換し、固定ギア16と共に転舵軸13を回転させる。固定ギア16、ナット17、軸18を覆うギアケース1が、ナックルまたはナックルに固定された転舵輪連結部材に固定される。
(もっと読む)
支持装置
【課題】荷重を受けた場合に、支持する複数箇所にて確実に分散することができると共に、それぞれの支持箇所の耐荷重に応じて適切な荷重の分散を容易にできる支持装置を提供する。
【解決手段】第一部位21に荷重Pを受け得る荷重受体20と、荷重受体20の第二部位22を非弾性体により支持する第一回転支持体31と、荷重受体20のうち第二部位22より第一部位21側に位置する第三部位23を弾性体により支持し、第一部位21に受ける荷重Pが無荷重の場合において荷重受体20が受け得る荷重Pの方向に予圧縮または予引張を付与した状態に設けられる弾性支持体40を備える。弾性支持体40による予圧縮または予引張の力F0は、荷重受体20の第一部位21に荷重Pを受けることによって弾性支持体40に生じる荷重F1より大きな力に設定される。
(もっと読む)
ロール回転駆動装置
【課題】 波動歯車減速機に起因する角度伝達誤差を低減させる。
【解決手段】 ブランケットロールの両端のロール軸の端部に、個別の駆動モータに接続した第1と第2の波動歯車減速機の出力側を取り付けて、ブランケットロールを一方向に回転させるときに、各波動歯車減速機の出力側から見た出力の回転方向が相対的に逆になるようにする。各波動歯車減速機について角度伝達誤差を計測すると、それぞれの角度伝達誤差の波形は、線Aと線Bのように、ほぼブランケットロールの回転角度方向に反転した形状となるため、一方の波動歯車減速機の角度伝達誤差の最大値12aと最小値12bに、他方の波動歯車減速機の角度伝達誤差の最小値13aと最大値13aがそれぞれ重なるように各波動歯車減速機の位相をずらす。各波動歯車減速機の角度伝達誤差を相殺させることで、ブランケットロールに対する角度伝達誤差の振れを低減させる。
(もっと読む)
ロボットおよび2台以上のロボットの組み立て方法
【課題】個体差を小さくすることが可能なロボットを提供する。
【解決手段】このロボット100は、アーム支持部2と、アーム支持部2に関節部を介して連結される下腕部3と、関節部に配置され、下腕部3をアーム支持部2に対して回動可能に連結し、偏心ギア77a(77b)が噛み合い位置を移動させながら回転する減速機7bと、アーム支持部2に対する下腕部3の相対的な回転位置が所定の位置にあるとき、減速機7bの回転角度位置が所定の回転角度位置となるように位置合わせ可能な位置決め部21b、71d、72eおよび3bとを備える。
(もっと読む)
多関節ロボット
【課題】アクチュエータ間の配線の絡みを防止することで電気配線の設置の好適化を図り、その上でしかも多関節ロボットの小型化を実現する。
【解決手段】関節アクチュエータ10は、モータモジュール11と、このモータモジュール11に組み付けられる配線ユニット13とを備えている。モータモジュール11の軸方向両端にはそれぞれトップカバー12とエンドカバー14とが設けられており、これらトップカバー12とエンドカバー14とに配線ユニット13のコネクタ83,84がそれぞれ取り付けられている。配線ユニット13のFPCケーブル82はモータハウジング27の外周に周回させて設けられている。また、配線ユニット13はモータハウジング27を回転軸として回転する筒体73を備えており、筒体73にFPCケーブル82が固定されている。
(もっと読む)
回転動力機構
【課題】 駆動手段である電磁石19〜21を、半円の範囲に集中的に配置できるようにする。
【解決手段】 内接ギアリング14に、この内接リングに対して偏心して一部を接触させた外接ギア7を設け、これら内接リングと外接部材とはそれらの一部を接触した状態で相対回転可能にしている。さらに、上記内接ギアリングと外接ギアとを互いに所定の箇所で接触させるために、内接ギアリングに常時一定の力を作用させる永久磁石17を設け、上記内接ギアリングに対して永久磁石の力に抗する方向の力を作用させる複数の電磁石19〜21を設けるとともに、これら複数の駆動手段を制御する制御手段を設ける。そして、この制御手段は、上記電磁石の磁力と上記永久磁石の磁力とを合成した半径方向の合成力を周方向に順次変化させる機能を備え、この順次変化させた合成力で内接リングを揺動し、外接ギア7を回転させる。
(もっと読む)
駆動装置
【課題】変形可能な変形機械要素を介して動力が伝達される装置における、変形機械要素の変形量を高精度に取得する。
【解決手段】回転子20と結合された第1アーム1と、固定子10と結合された第2アーム2と、固定子10と第2アーム2の間に設けられた弾性部材30と、回転子20に設けられたエンコーダ板Eと、固定子10に設けられ、エンコーダ板Eの符号を検出する第1フォトセンサS1と、第2アーム2に設けられたエンコーダ板Eの符号を検出する第2フォトセンサS2とを備えて、駆動装置を構成する。
(もっと読む)
電動アクチュエータ
【課題】産業機械等への適用が容易であり、かつ、耐久性にすぐれた電動アクチュエータを提供する。
【解決手段】電動アクチュエータ1は、内周面にねじ溝7が形成され、端部に開口8を有するシリンダ2と、開口8からシリンダ2の内部に挿入される基端部3a及びその反対側でシリンダ2外部の先端部3bを有するロッド3と、ロッド3の基端部3aに対してねじ溝7の中心軸と同軸回りに相対回転可能で、かつ、中心軸の方向にロッド3と一体に移動するように連結され、外周面にねじ溝7に螺合するねじ山11を有するねじ部材5と、ねじ部材5をロッド3に対して相対的に回転駆動させることにより、ねじ部材5及びロッド3を中心軸の方向に直線移動させるモータ4とを備えている。
(もっと読む)
撓み噛合い式歯車装置
【課題】外歯歯車の変形による撓み応力を極力抑え、外歯歯車の変形による内歯歯車と外歯歯車との歯形の干渉を回避して負荷トルクの増大を可能とする。
【解決手段】減速用内歯歯車130Aと、外歯歯車120Aと、起振体104と、を備えた撓み噛合い式歯車装置100において、起振体104の外周の形状が、減速用内歯歯車130Aと外歯歯車120Aとを噛合い状態とするとともに円弧形状とされた第1円弧部FAと、第1円弧部FAよりも小さい曲率半径r2の第2円弧部SAと、第1円弧部FAよりも大きい曲率半径r3であって減速用内歯歯車130Aと外歯歯車120Aとを非噛合い状態とする第3円弧部TAと、を順に繋ぎ合わせた形状であると共に、第1円弧部FA、第2円弧部SA、及び第3円弧部TAの繋ぎ部分において第1円弧部FA、第2円弧部SA、及び第3円弧部TAの接線T1、T2がそれぞれ共通とされている。
(もっと読む)
ベルト式減速装置およびそれを用いた駆動装置
【課題】小型化を図りつつ、高い静粛性を発揮することができるベルト式減速装置を提供する。
【解決手段】回転駆動力を入力する入力プーリ12と、入力プーリ12より大径に形成され、入力プーリ12に入力された回転駆動力を減速して出力する出力プーリ14と、無端状に形成され、入力プーリ12から出力プーリ14に亘って架けられた一本の無端状ベルト17を備える。そして、入力プーリ12と出力プーリ14は、回転軸方向にずれて配置される。さらに、回転軸方向から見て、入力プーリ12の外形円と出力プーリ14の外形円とは、少なくとも一部において重なるように配置される。
(もっと読む)
1 - 20 / 121
[ Back to top ]