
Fターム[3J048AB12]の内容
防振装置 (35,941) | 振動発生の防止、検出 (1,599) | 変位の検出 (1,088) | 力の検出 (67)
Fターム[3J048AB12]に分類される特許
1 - 20 / 67
圧延機の振動抑制方法
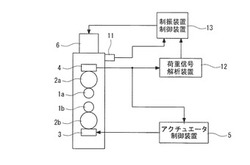
【課題】仕上圧延機などの圧延機に生じる振動を確実に抑制することのできる圧延機の振動抑制方法を提供する。
【解決手段】ワークロール1a,1b、バックアップロール2a,2b、圧下用アクチュエータ3、荷重計4及びアクチュエータ制御装置5を備えた圧延機の振動を圧延機に付設された制振装置6により抑制するに際して、荷重計4から圧延時に出力された荷重信号を処理して圧延機の固有振動成分を抽出し、抽出された固有振動成分に基づいて制振装置6を制御する
(もっと読む)
除振装置

【課題】高い除振性能を実現するのに有利な技術を提供する。
【解決手段】除振台10に加えるべき力を算出する第1算出部510と、算出された力を、複数のアクチュエータ30のそれぞれが除振台10に加える力に分配する分配部520と、を有し、分配部520は、第1算出部510で算出された力を、第1周波数帯域の力成分のみを含む第1力と、第1周波数帯域よりも低い第2周波数帯域の力成分のみを含む第2力とに分離する分離部522と、第1算出部510で算出された力を複数のアクチュエータ30のそれぞれに分配するための分配比率を周波数帯域ごとに有し、分配比率のうち第1分配比率を第1力に乗算した結果と、第1分配比率とは異なる第2分配比率を第2力に乗算した結果とを足し合わせることで複数のアクチュエータ30のそれぞれが除振台10に加える力を算出する第2算出部524と、を含むことを特徴とする除振装置1を提供する。
(もっと読む)
シリンダ装置
【課題】車体等の被取付側へ伝達する力を歪センサにより精度よく求めることができるシリンダ装置を提供する。
【解決手段】緩衝器11のボトム側となるシリンダ本体11Aの他端に取付アイ16を設けると共に、この取付アイ16の内側に取付ピン18を貫通して設ける。取付ピン18には、軸方向に延びる挿入孔18Fを設け、この挿入孔18Fには、カートリッジ式の歪センサカセット20を挿入する。この歪センサカセット20は、円管状の軸部材21と、該軸部材21の内側に取付けられた歪センサ22とにより構成する。そして、歪センサ22により、緩衝器11から車体2へ伝達される力を求め、該力を用いて緩衝器11が発生する減衰力を制御する。
(もっと読む)
振動の絶縁
【課題】機械の振動を絶縁する、改良された機械取り付け台を提供する。
【解決手段】機械用の、また機械から出る振動を絶縁する支持部は、複数の取り付け台を備え、各取り付け台が機械の静的負荷を完全に支持する弾性ブロックと、上記取り付け台の共鳴周波数を超えた状態、かつ望ましい周波数帯域では、構造的励起共鳴に対して基本的に取り付け台のゼロ剛性を維持するように、また不均衡な状態の力の船体への伝達を修正するように構成された慣性振動発生器を備える能動型絶縁手段とを備える。慣性振動発生器に結合された制御システムが、共鳴振動の始まりを阻止するように構造的共鳴を減衰させるように、減衰力の信号を印加する手段を含む。
(もっと読む)
振動系における機械的動力損失を測定する方法
【課題】自動車のエンジンマウントやサスペンション等の振動絶縁装置又は緩衝装置の設計支援するため、振動系における機械的動力損失を測定する方法を提供する。
【解決手段】この系は、線形時不変であり、かつ、定常状態であると仮定する。この方法は、振動系と振動系の外側の部品との間の接続点を識別するステップを含む。窓付き時間領域において各接続点における加速度を測定し、窓付き時間領域に対して各接続点における力も決定する。高速フーリエ変換により時間領域値を周波数領域値に変換し、周波数領域加速度値を速度値に変換する。振動系の動力損失は、振動系へのパワーフローの1/2の合計に等しい。この場合、各パワーフローは、時間窓ごとの周波数領域において接続点における複素共役速度×力の積の実数部の1/2である。
(もっと読む)
外力検出が可能な防振装置
【課題】入力荷重の高精度な検出を、充分な耐久性および実用性をもって実現することが可能とされた、新規な構造の外力検出が可能な防振装置を提供すること。
【解決手段】誘電性の弾性材からなる誘電体層20の両面に対して導電性の弾性材からなる一対の電極膜22,22を設けた静電容量型センサ18が、第1の取付部材12と第2の取付部材14の間への外力作用に際しての本体ゴム弾性体16への引張力の作用方向に伸びる状態で配設されて、本体ゴム弾性体16に固着されている。
(もっと読む)
建物
【課題】制振装置に不具合が発生した場合でも建物への影響を軽減可能にすることを目的とする。
【解決手段】制振装置のダンパと建物の固定を解除するフリー機構を設けると共に、フリー機構を作動させるソレノイドを設け、ダンパの荷重が予め定めた閾値以上となる異常なダンパを検出し(104)、異常なダンパのソレノイドを駆動することにより、ダンパと建物10の固定を解除する(106)。また、水平剛性バランス(捩れ)を演算して(108)、捩れが所定値以上の場合には(110)、他のダンパのソレノイドを作動して他のダンパと建物の固定を解除する(112、114)。
(もっと読む)
車両の振動低減システムおよび車両の振動低減方法
【課題】エンジンの振動の制御とタイヤの回転振動の制御を自動的に切り替えて、車両内の所定位置での振動を低減する振動低減システムおよび車両の振動低減方法を提供する。
【解決手段】制御装置11は、判定用センサ15から得た信号と、車輪の回転数を測定するセンサ7からの回転数信号とに基づいて、信号周波数が回転数信号の周波数の実数倍の第1の抽出信号を生成し、判定用センサ15から得た信号と、エンジンのの回転数を測定するセンサ6からの回転数信号とに基づいて、信号周波数が回転数信号の周波数の実数倍の第2の抽出信号を生成し、第1の抽出信号と第2の抽出信号とを比較し、比較した結果に応じてACM3a,3bを制御して、車両10内の所定位置に生じる振動を低減するようにする。
(もっと読む)
車体制振制御装置
【課題】車体振動抑制用エンジントルク補正量が制御分解能未満でも、変速により、車体振動抑制用エンジントルクを補正制御する。
【解決手段】サスペンション装置を介して車輪を懸架された車両のバネ上質量である車体の振動を、駆動力補正制御により抑制するための車体制振制御装置において、車体振動を抑制するための制振用駆動力補正量を演算して、駆動力補正制御に資する制振用駆動力補正量演算手段と、該手段で求めた制振用駆動力補正量が設定値未満であるとき、駆動力の伝達系における変速比をハイ側へ変更する変速比変更手段とを具備する。
(もっと読む)
ディスク装置
【課題】 ディスク状媒体を用いて記録あるいは再生を行うディスク装置において、小型軽量な装置で、2軸方向の振動を抑圧するディスク装置を得る。
【解決手段】 ディスクを回転させるモータとピックアップ手段とを有するメインフレーム機構3と、メインフレーム機構3に接して設けられた制振部とを備えるディスク装置であって、前記制振部は、第一の方向に可撓性のある第一の変形面と前記第一の方向に略直交する第二の方向に可撓性のある第二の変形面とをもつバネ部材、及びバネ部材に保持される補助質量を有し、前記第一の変形面と前記第二の変形面とが可撓自在に設ける。
(もっと読む)
自動レベリング装置と免震装置
【課題】 簡単な構造で被支持体の支持レベルを調整する自動レベリング装置と免震装置とを提供しようとする。
【解決手段】
従来の自動レベリング装置にかわって、揺動レバーの揺動角度に応じて流体を荷重支持部材と系外との間または荷重支持部材と流体の圧力源との間のうちのどちらか一方に流すことをできる切替弁と、特定の箇所である特定箇所を持ち前記特定箇所を上下方向に移動距離だけ移動して前記揺動レバーを該移動距離に対応する揺動角度だけ揺動させるバルブ位置制御部材と、前記揺動レバーが所定の前記揺動角度である所定揺動角度を越えて揺動するのを阻止するストッパ部を設けられたガイド部材と、被支持体と前記特定箇所と複数の連結部材を多段に連結した連結部材と、を備えるものとした。
(もっと読む)
除振装置および精密ステージ装置
【課題】鉛直方向および水平方向の両方の床振動を有効に除振することが可能な除振装置を提供する。
【解決手段】この除振装置100は、鉛直方向の床振動を除振する鉛直方向除振機構2と、鉛直方向除振機構2とは独立して設けられた振り子312を含み、振り子312の復元力を用いて水平方向の床振動を除振する水平方向除振機構3とを備え、鉛直方向除振機構2および振り子312を含む水平方向除振機構3は、それぞれの除振動作時に除振方向の力成分が他の除振方向の力成分に対して影響を与えないように構成されている。
(もっと読む)
車両の振動低減システム
【課題】タイヤの回転による振動が加振源になった時にこの振動の伝達を低減する車両の振動低減システムを提供する。
【解決手段】加振力を発生するACM3aと、車両内の所定位置での振動を検出するセンサ9と、車輪の回転数を測定するセンサ7と、制御装置11とを備え、制御装置11は、センサ7からの回転パルス信号に基づいて、信号周波数が回転パルス信号の周波数の実数倍の参照信号を生成し、振動を検出するセンサ9から得た信号と参照信号とに基づいてACM3aに加振力を発生させて、車両内の所定位置に生じる振動を低減するように制御する。
(もっと読む)
サスペンション制御装置
【課題】 車両の制動時に前輪側での輪荷重の抜けが発生するのを低減でき、制動距離の短縮化を図ることができるようにする。
【解決手段】 車両の制動時には、コントローラ17内に形成したアンチダイブ制御部19により減衰力特性をハードな状態に切換える制御を行う。制御指令演算部20では、ピッチレートセンサ16で検出されるピッチレートP(t)の変化量、即ち前輪荷重検出手段による輪荷重が減少してくると、アンチダイブ制御を行っている間であっても少なくとも伸び側の減衰力特性をソフト側に変更する制御を行う。ピッチレートP(t)の微分値dP/dtから車両のノーズダイブの終了時を判断し、アンチダイブ制御を解除することにより、車両の走行状態に応じたアンチダイブ制御を実行することができる。
(もっと読む)
セミアクティブショックアブソーバ制御方法
【課題】セミアクティブショックアブソーバ制御システムを提供すること。
【解決手段】例えば実時間調整可能なショックアブソーバシステムなどのバネ質量系のためのセミアクティブ制御手法が提供される。この手法は、システムパラメータ及びユーザ定義可能な又は前もってセットされた入力に基づき複数の動作ゾーンを定義するステップを備える。また、この手法は、非慣性バネ質量系応答と、系に作用する多次元の力と、運動の極値での系の動作を正確に定義するための加速度境界計算とを明らかにするためのステップを備える。この手法は、概して、複数のバルブ制御信号を生成すること、そのバルブ制御信号の中から選択すること、および選択された制御信号を閉ループのフィードバック系におけるバルブに加えてバネ質量系におけるエネルギーを調節することに方向づけられる。
(もっと読む)
渦流量計
【課題】渦流量計の耐振性を向上させる渦流量計を実現する。
【解決手段】管路本体に取り付けられたケースを具備し、カルマン渦による交番圧力の変動を渦発生体に設けられた応力検出素子で検出して流速流量を測定する渦流量計において、前記ケースに設けられXYZ軸方向のケース振動のノイズをそれぞれ検出する3軸ジャイロと、この3軸ジャイロで検出された振動信号に基づきこのジャイロ検出振動信号と逆位相の振動信号を出力する振動制御回路と、前記3軸ジャイロのケースに前記XYZ軸に直交してそれぞれ一方の面が設けられ前記振動制御回路からの信号に基づき前記ジャイロ検出振動信号を打ち消す振動を発生する圧電アクチュエータと、この圧電アクチュエータの他方の面にそれぞれ一面が設けられた付加質量とを有する振動検出発生ユニットを具備したことを特徴とする渦流量計である。
(もっと読む)
相対位置検出器および相対位置検出器を備えた制振装置、ディスク装置
【課題】基準位置を極めて精確に検出するとともに、基準位置からのずれ量も磁石と磁気感応素子との隙間量の変化の影響を受けずに検出できる相対位置検出器を得る。
【解決手段】相対位置検出器は、相対的に移動する方向に沿ってS極とN極とを並べて配置する磁石372ならびに磁石372を挟む一対のホール素子373a、373bを備えるものである。これにより、一軸方向の相対位置を精確に検出する相対位置検出器を得ることができる。
(もっと読む)
制震構造体
【課題】 複数のコンクリートブロックを水平または垂直方向にアンボンドプレストレス部材で緊張して一体化してなる圧着コア壁において、圧着コア壁自身が制震装置の一部として機能し、地震時のエネルギーを効率良く吸収または制御し、構造物の損傷等を回避できるようにする。
【解決手段】 複数のコンクリートブロック2を水平または垂直方向にアンボンドプレストレス部材3で緊張して一体化してなる圧着コア壁について、コンクリートブロック2どうしの接触面に摩擦を調整するための摩擦低減材または粘弾性体4を介在させる。さらに、各コンクリートブロック2を圧着しているアンボンドプレストレス部材3の端部に緊張装置5を設置することで、アンボンドプレストレス部材3の張力を調整することもできる。
(もっと読む)
トレーラと牽引車両との間の測定距離を用いたトレーラの揺れ軽減方法及びシステム
【課題】車両の後端からトレーラまでの距離を直接且つ正確に測定し、トレーラの揺れ軽減を実施する電子制御ユニットに正確な測定値を提供することによって、トレーラの揺れを軽減する方法を提供する。
【解決手段】複数の車両特性を感知すること、車両の後端に位置付けられている少なくとも1つのセンサ44,46によって、車両10とトレーラ50との間の距離を感知すること、感知された距離に基づいてトレーラの振動作用を求めること、並びに振動作用に応答して、車両の少なくとも1つの車輪20にブレーキ力を加えることを含む。
(もっと読む)
減衰力制御装置
【課題】 実車両のバネ上質量特性に見合った減衰係数の制御則に基づいてサスペンション装置の減衰力を制御することができる減衰力制御装置を提供すること。
【解決手段】 仮想バネ上部材の前輪側バネ上質量MF_Nと仮想質量関連制御定数KM_Nとに基づいて求められる前輪側バネ上質量MFと前輪側制御定数KM_Fとの相関関係式(eq.5)に基づいて、前輪側バネ上質量MFの変化に応じて変化する前輪側制御定数KM_F(第1制御定数)が計算される。また、仮想バネ上部材の後輪側バネ上質量MRと後輪側制御定数KM_Rとの相関関係式(eq.9)に基づいて、後輪側バネ上質量MRの変化に応じて変化する後輪側制御定数KM_R(第2制御定数)が計算される。そして、前輪側制御定数KM_Fと後輪側制御定数KM_Rに基づいて質量関連制御定数KMが計算される。
(もっと読む)
1 - 20 / 67
[ Back to top ]