
Fターム[3J053AB39]の内容
流体伝動装置の制御 (6,334) | HST(制御内容) (1,218) | 出力内容に関連した制御 (315) | 過負荷防止 (53) | 原動機関連(ノッキング、エンスト防止等) (29)
Fターム[3J053AB39]に分類される特許
1 - 20 / 29
作業車の負荷制御装置
【課題】エンジン負荷が大きいほど走行駆動系の変速装置が減速操作されるように制御するにあたり、走行駆動系とは別の駆動系である外部動力取出軸からの動力で駆動される作業装置が安定的に稼働するように制御すること。
【解決手段】制御手段は、PTO系作業装置の作動状態が検出されているときにおけるエンジン回転数の設定回転数からの低下率又は低下量の方が、PTO系作業装置の非作動状態が検出されているときにおけるエンジン回転数の設定回転数からの低下率又は低下量よりも小さい状態で、変速操作手段に制御信号を出力するように、作業状態検出手段の検出信号に基づく変速操作手段への制御信号の出力状態を変更するように構成されている。
(もっと読む)
田植機

【課題】省エネ効果を高めることができ、エンジンによる無駄な燃料消費を抑えることが可能な田植機を提供する。
【解決手段】田植機1は、エンジン14と、HST21aおよび遊星歯車機構21bを有するHMT21と、主変速レバー65と、苗継ぎ位置検出スイッチ65aと、モータ71と、モータ用ポテンショメータ71aと、変速ペダル67と、ペダル用ポテンショメータ67aと、制御装置100と、を備え、制御装置100は、苗継ぎ位置検出スイッチ65aから苗継ぎ位置検出信号を取得しない場合でペダル用ポテンショメータ67aから変速ペダル67が踏み込まれていないことを示すペダル信号を取得するときにエンジン14が第一アイドリング回転数で回転するようにモータ71を駆動し、苗継ぎ位置検出スイッチ65aから苗継ぎ位置検出信号を取得する場合にエンジン14が第二アイドリング回転数で回転するようにモータ71を駆動する。
(もっと読む)
油圧駆動式の車両、およびその制御方法と制御装置
【課題】HST(静液圧トランスミッション)を有するパワートレインを備えた車両において、クリープ現象、アクセル操作に対する発進タイムラグ、走行中にアクセル操作量を急激に減らした時のエンジン・オーバーラン、及び走行中に負荷が急増した時のエンジン・ストールなどの問題を解決する。
【解決手段】パワートレイン10内のHSTコントローラ15が、アクセル操作量に応じてHSTポンプ23の最大吸収トルクを制御する。他方、車両の走行中にアクセル操作量が急激に減った時、または車両の走行中にエンジン回転数が急激に減った時には、エンジン回転速度に応じてHSTポンプ23の最大吸収トルクが制御される。
(もっと読む)
作業車両のエンジンオーバーラン防止制御装置
【課題】メカブレーキの効きを早めることなくエンジンのオーバーランを防止するようにして、エネルギーロスを抑制して、燃費悪化やブレーキ装置のクーリング能力低下を防止する。
【解決手段】エンジン回転数検出手段31で検出された実際のエンジン回転数Neが、エンジンの最大回転数を超えた場合には、実際のエンジン回転数Neが高くなるほどインチング率の下限値IRLを高く設定して、この実際のエンジン回転数に応じたインチング率の下限値IRLと、ブレーキ操作手段26のブレーキストロークSに対応するインチング率設定手段36で設定されたインチング率IRとのうちいずれか高い方のインチング率が得られるようにHST油圧ポンプ16の容量を調整する。
(もっと読む)
苗移植機
【課題】本発明では、作業時の燃料消費を抑えた、低燃費の苗移植機を提供することを課題とする。
【解決手段】
走行車体2にエンジン20と油圧無段変速装置23を設け、走行車体2の後部に圃場に苗を植え付ける苗植付装置52を設け、油圧無段変速装置23の出力を切り替えて機体の前後進及び走行速度を操作する変速操作レバー8を設けた苗移植機において、油圧無段変速装置23に駆動容量を変更可能な可変アクチュエータ29を設け、走行車体2の走行状態を検知する第1走行検知部材14と第2走行検知部材9を設け、第1走行検知部材14の検知する走行状態に合わせて可変アクチュエータ29の駆動容量とエンジン20の回転数を制御する制御装置6を設けて構成する。
(もっと読む)
油圧無段変速走行装置の変速制御
【課題】本発明は、HST斜板角を自動制御する油圧無段変速走行装置の変速制御において、急激な駆動負荷の増加を検出して、駆動負荷の増加程度に応じて最適のHST斜板角に変更して変速することで 駆動負荷の急激な増加が生じてもエンジン停止に至らないで出来るだけ走行速度を落とさないで走行できるようにすることを課題とする。
【解決手段】走行スロットル手段90と走行速度検出手段100と制御手段92及び油圧無段変速走行装置1のHST斜板角変更手段113を設け、前記走行スロットル手段90を最大加速に設定した場合に前記走行速度検出手段100で検出する走行速度減少率が大であると、HST斜板角変更目標角度を小さな目標角度に変更してなる油圧無段変速走行装置の変速制御とする。
(もっと読む)
走行駆動制御システム
【課題】エンジンストール傾向となるようなエンジン回転数と無段変速装置の変速比との間の不調和がもたらす走行の不安定さを回避する技術を提供する。
【解決手段】アクセル操作具による操作量に基づく回転調節量を回転調節器に付与する回転調節量付与手段と、予め設定された基準対応関係を用いて前記アクセル操作具による操作量から決定される変速制御量を前記無段変速装置の変速制御入力部に付与する変速制御量付与手段と、作業車の発進を検知する車両発進検知手段とが備えられ、変速制御量付与手段には、作業車の発進から走行に至る発進走行時間の間、基準対応関係を用いて決定される変速制御量を低速方向の抑制度をもって抑制する発進時速度抑制部55が含まれている。
(もっと読む)
作業車の車速制御構造
【課題】運転者に負担を強いることなく発進時での過負荷に起因したエンジンストールの発生を抑制できるようにする。
【解決手段】エンジン回転数がエンジン3のアイドリング回転数に設定した第1設定回転数である場合は、無段変速装置9の変速比が最小変速比よりも大きい変速比に設定した第1変速比になり、又、エンジン回転数が第1設定回転数よりも高速側に設定した第2設定回転数以上の回転数である場合は、無段変速装置9の変速比が最小変速比に維持され、更に、エンジン回転数が第1設定回転数と第2設定回転数との間の回転数である場合は、そのときのエンジン回転数が低いほど無段変速装置9の変速比が第1変速比と最小変速比との間の大きい変速比に変更されるように、車速制御手段27Bがエンジン回転数検出手段62の出力に基づいて変速比変更手段Cの作動を制御するように構成する。
(もっと読む)
作業車両
【課題】エンジンストールの発生を抑止することが可能な作業車両を提供する。
【解決手段】算出したエンジン回転数低下率Rが増大してα%(第一の設定値)に達した時、電磁比例弁13aを無段変速機13の入出力比が第一の変化率C1で減速側へ変更されるように制御し、算出したエンジン回転数低下率Rが減少してβ%(第二の設定値)に達した時、電磁比例弁13aを無段変速機13の入出力比が第二の変化率C2で増速側へ漸次変更されるように制御し、算出したエンジン回転数低下率Rが増加してα%よりも小さいγ%(第三の設定値)に達した時、電磁比例弁13aを無段変速機13の入出力比が一定になるように制御する制御装置100を具備し、制御装置100は、第二の変化率C2の絶対値を、第一の変化率C1の絶対値よりも小さくなるように設定する。
(もっと読む)
油圧駆動式作業車両
【課題】エンジンストールによるエンジンの停止を防止することである。
【解決手段】エンジン(15)によって駆動される斜板式の油圧ポンプ(21,31)と、油圧ポンプ(21,31)からの作動油圧によって駆動される油圧モータ(24,34)とが接続された主回路(20,30)と、エンジン(15)によって駆動されるチャージポンプ(51)と、チャージポンプ(51)からの作動油圧がパイロット圧力として導入されることで移動し上記油圧ポンプ(21,31)の斜板(S)を傾転させるピストン(6a)を有するセンタリングスプリング(6d)付きのサーボシリンダ(61,62)とを有するチャージポンプ回路(50)とを備えている。チャージポンプ(51)の吐出側の主通路(52)には、主通路(52)から作動油の一部を漏らすためのブリードオフオリフィス(67)を有したブリードオフ通路(66)が接続されている。
(もっと読む)
作業車の負荷制御装置
【課題】エンジン負荷が大きいほど走行駆動系の変速装置を減速操作するにあたり、走行駆動系とは別の駆動系である外部動力取出軸からの動力で駆動される作業装置が安定的に稼働するように制御できる作業車の負荷制御装置を提供する。
【解決手段】走行駆動系とは別系の外部動力取出軸を介してエンジン動力が伝達されるPTO系作業装置の作動の有無を判別する作業状態検出手段74を備え、PTO系作業装置の作動状態が検出されているときにおける変速操作手段による減速操作量が、PTO系作業装置の非作動状態が検出されているときにおける減速操作量よりも大きくなるように制御する。
(もっと読む)
走行車両
【課題】 急激な速度変化を防止しつつ、アンチストール機能の応答性を簡単な構造で改善する。
【解決手段】 HSTポンプ66によってHSTモータ57を駆動して走行装置4を駆動するHSTと、HSTポンプ66の斜板を制御する走行操作装置14とを備え、HSTポンプ66は、走行操作装置14からショック緩和用絞り77を介してパイロット圧が供給される一対の受圧部66a,66bの差圧によって斜板の角度が制御され、エンジン回転数の低下にともなって走行操作装置14の一次側圧力が降下してHSTポンプ66の斜板が中立側に戻ることでエンジンストールが防止される走行車両において、一端側が走行操作装置14の一次側の油圧流路に連通し他端側がショック緩和用絞り77と受圧部66aとの間の油圧流路に連通する逃がし油路83設け、逃がし油路83に、前記受圧部66aの圧力>走行操作装置14の一次側圧力、のときに開くチェック弁84を設ける。
(もっと読む)
作業車両
【課題】HST走行装置を備えた作業車両における、エンジン中低速回転時にHST負荷トルクが過大となった場合の、エンストや過大なエンジン回転低下を防止する。
【解決手段】作業車両が、HST走行装置と、目標回転速度を設定するガバナ操作器の操作検出手段と、HSTポンプの容量制御器に目標回転速度に応じた制御信号を算出し出力するコントローラと、エンジンの回転検出手段を備え、コントローラはさらに、回転検出手段により検出した回転速度が、目標回転速度よりも低く設定した設定回転速度以下で、エンジンの最大トルク回転速度よりも低い所定回転速度以下またはエンジンの最大トルク回転速度以下の状態が所定時間以上継続したときには、制御信号を低減させ、急激な回転速度の低下およびエンジンの停止を防止する。
(もっと読む)
作業車の走行変速構造
【課題】走行負荷の増大により、静油圧式無段変速装置を低速側に操作するように構成する場合、走行用の駆動力(トルク)の不足を避けながら、エンジンに大きな負荷が掛からないように構成する。
【解決手段】エンジンの動力が伝達される走行用の静油圧式無段変速装置7の油圧ポンプ7Pを変速自在に構成し、静油圧式無段変速装置7の油圧モータ7Mを変速自在に構成する。走行負荷が増大すると、静油圧式無段変速装置7の油圧モータ7Mが低速側に操作される。静油圧式無段変速装置7の油圧モータ7Mが低速側に操作されても、走行負荷が増大すると、静油圧式無段変速装置7の油圧ポンプ7Pが低速側に操作される。
(もっと読む)
自走式リサイクル機械
【課題】 走行時の制御を簡単なスイッチの遠隔操作だけで行い、走行速度の切換操作もオペレータの意向に沿って安全に行うことができるようにする。
【解決手段】 遠隔操作を行うリモコン30に走行スイッチ30Aを設ける。走行スイッチ30AのON,OFF操作により、走行用油圧モータ23,24を回転,停止させる。そして、リモコン30の走行スイッチ30AをON操作し続ける持続時間が予め決められた所定時間に達するまでは、エンジン回転数を低速走行時のエンジン回転数Nmin に設定する。一方、前記持続時間が所定時間以上になったときには、エンジン回転数を高速走行時のエンジン回転数Nmax まで漸次増大させる。これによって油圧ポンプ21の吐出量を増大させ、走行用油圧モータ23,24の回転速度を圧油の流量に応じて増大させる構成とする。
(もっと読む)
多目的作業車
【課題】従来の広範囲な作業を可能な多目的作業車の機能を一層充実させることである。
【解決手段】作業車の車速を検出する車速センサと、走行地の車体の前後方向の勾配を検出する傾斜センサ77及び/又は車体の重量を検出する重量センサ84と、傾斜センサ77及び/又は重量センサ84の検出値に応じて静油圧式無段変速装置の出力を所定の範囲内に制限する制御装置100を備えた多目的作業車であり、傾斜センサ77の検出する作業車が走行地を走行中に作業車の前後方向の勾配角度に応じて、変速装置のトラニオン軸作動角度の最大角度を制御して出力を制御することで、燃費の節約と走行安全性を確保することができる。また、重量センサ84の検出する作業車の車体重量に応じて変速装置のトラニオン軸作動角度の最大角度を制御して出力を制御することで、エンストの防止が図れ、燃費が従来より向上する。
(もっと読む)
可変容量型流体圧ポンプモータ式変速機の制御装置
【課題】内燃機関の運転効率と変速機の動力伝達効率とを考慮して、内燃機関の燃費を向上できる可変容量型ポンプモータ式変速機の制御装置を提供すること。
【解決手段】固定段変速比と中間段変速比とを設定可能な可変容量型流体圧ポンプモータ式変速機の制御装置において、目標変速比を算出する目標変速比算出手段(ステップS13)と、目標変速比に最も近い固定段変速比を算出する固定段変速比算出手段(ステップS18-6)と、目標変速比に最も近い中間段変速比を算出する中間段変速比算出手段(ステップS18-1)と、各変速比における内燃機関の目標変速比燃費、固定段変速比燃費、中間段変速比燃費をそれぞれ算出する燃費算出手段(ステップS17,S18-5,S18-10)と、各燃費の中で最も燃料消費率がよくなる最適変速比を設定して、目標変速比を補正する目標変速比補正手段(ステップS18)とを設けた。
(もっと読む)
作業車両
【課題】本発明では、油圧無断変速走行装置の走行速度制御において、HSTの作動オイルの温度変化があっても変速レバーの変速操作に追従して応答性良く可動斜板を回動して変速動作するようにすることが第一の課題であり、高速走行或いは高速回転時に過負荷でエンジンが停止することを防ぐようにすることが第二の課題である。
【解決手段】変速操作具5の操作に連動してHST1のトラニオン軸を回動するアクチェーエータ114を設けた作業車両において、前記変速操作具5の変速操作速度を検出する変速センサ103とトラニオン軸の回動速度を検出するトラニオンセンサ105を設け、変速センサ103の変速速度とトラニオンセンサ105の回動速度が適正対応で無い場合は、その誤差を次回の変速操作時に修正すべくアクチェーエータ114の駆動力を変更すべく制御したことを特徴とする作業車両とした。
(もっと読む)
作業車両
【課題】静油圧式変速装置(HST)に一定以上の過大な負荷が掛かっても、エンジンがエンストすることがない作業車両を提供すること。
【解決手段】エンジンの動力をアクセルペダルの操作量に対応させて電子制御により変速制御する油圧閉回路7dを備えたHST7を含む動力伝達機構を設けている。HST7の油圧閉回路7dの出力側に設けられる油圧モータ7bの近傍の油路の油圧を圧力センサ70a,70bで測定し、その値が所定値以上になると、制御装置はHST7の出力を減速側に変速制御してエンストを防止する。
(もっと読む)
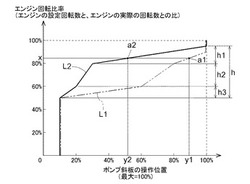
動力源回転数可変型CVT制御システム
パワートレーン制御システム(21)が開示されている。パワートレーン制御システムは、動力源(24)、および動力源の出力部(30)に結合されたCVT(26)を有し得る。パワートレーン制御システムはさらに、動力源およびCVTと通信する制御装置(48)を有し得る。制御装置は、複数の速度モードを備えるマップ(58)有し、かつ、複数の速度モードの少なくとも1つに対して、制御装置は、CVT出力回転数または対地速度の少なくとも一方に基づいて実際の動力源の回転数を変更するように構成され得る。 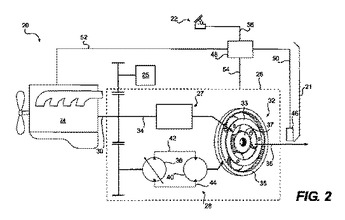 (もっと読む)
(もっと読む)
1 - 20 / 29
[ Back to top ]