
Fターム[3J062AB28]の内容
Fターム[3J062AB28]に分類される特許
1 - 20 / 76
リンク作動装置
【課題】 コンパクトな構成でありながら、精密で広範な作動範囲の動作が可能で、かつ回転対偶部に設けられた軸受の長寿命化を実現できるリンク作動装置を提供する。
【解決手段】 基端側のリンクハブ2と基端側の端部リンク部材5との回転対偶に軸受を介在させる。制御装置によりアクチュエータを制御して、定められた作業動作を実行させる作業時制御と、この作業時制御の停止中になされ、軸受に封入されているグリスを循環させるグリス循環制御とを行う。作業時制御における折れ角の最大値θmaxは、機構上可能な折れ角の最大値である最大可動折れ角θ´maxを超えないものとし、かつグリス循環制御における折れ角の最大値は、作業時制御における折れ角の最大値θmaxよりも大きく、かつ最大可動折れ角θ´maxよりも小さい値とする。
(もっと読む)
リンク作動装置の原点位置初期設定方法およびリンク作動装置

【課題】 コンパクトな構成でありながら、広作動範囲で高速動作が可能なリンク作動装置の位置決め精度を高めるために、位置決め動作の基準となる原点位置を初期設定する方法を提供する。
【解決手段】 リンク作動装置51の基端側のリンクハブ2に対する先端側のリンクハブ3の姿勢である先端姿勢を定められた姿勢に設定する第1の過程と、先端姿勢が前記定められた姿勢にあるリンク作動装置51に対して先端姿勢を変化させようとする力である予圧を付与する第2の過程と、リンク作動装置51に予圧が付与された状態にあるときの各アクチュエータ53の動作量を記憶する第3の過程とを含み、この記憶した動作量を各アクチュエータ53の原点位置として設定する。
(もっと読む)
リンク作動装置
【課題】 リンク機構の数が二組で構成でき、外径寸法が小さいコンパクトな構成でありながら剛性が高いリンク作動装置を提供する。
【解決手段】 リンク作動装置1は、入出力側にそれぞれ配されたリンクハブ2,3と、二組のリンク機構4A,4Bとを有する。リンク機構4A,4Bは、四つの回転対偶からなる三節連鎖のリンク機構であり、リンクハブ2,3に対して回転可能に端部リンク5,6を連結し、端部リンク5,6を中央リンク7に対して回転可能に連結してなる。二組のリンク機構4A,4Bの少なくとも一組に、入力側の端部リンク5と出力側の端部リンク6とを互いに連動して回転変位させる連動手段9を設ける。二組のリンク機構4A,4Bのそれぞれに、互いに異なる二つのリンク機構構成部材、例えばリンクハブ2および端部リンク5に両端が直接または間接的にそれぞれ連結された伸縮作動可能な直動アクチュエータ25を設ける。
(もっと読む)
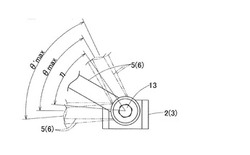
パラレルリンク機構、等速自在継手、およびリンク作動装置
【課題】 精密で広範な作動範囲の高速動作が可能であり、機構全体が軽量でコンパクトなパラレルリンク機構を提供する。
【解決手段】 パラレルリンク機構1は、基端側および先端側のリンクハブ2と、3組以上のリンク機構とを有する。リンク機構は、四つの回転対偶からなる三節連鎖のリンク機構であり、基端側および先端側の端部リンク部材5と中央リンク部材とでなる。リンク機構の回転対偶は、一対の対偶構成部材2,5が互いに軸受12を介して連結されており、一方の対偶構成部材5に設けられた軸部13が軸受12の内輪12aの内周に嵌合し、かつ他方の対偶構成部材2に設けられた環状内面形成部15が軸受12の外輪12bの外周に嵌合する。軸部13と環状内面形成部15とにより、軸受12の内部と外部間の潤滑剤等の出入りを規制するシール構造19,21を構築する。
(もっと読む)
リンク作動装置
【課題】 外径寸法が小さいコンパクトな構成であり、拘束、支持、案内等をする物とリンク機構との接触を回避しやすいリンク作動装置を提供する。
【解決手段】 リンク作動装置1は、入出力側にそれぞれ配されたリンクハブ2,3と、二組のリンク機構4A,4Bとを有する。リンク機構4A,4Bは、四つの回転対偶からなる三節連鎖のリンク機構であり、リンクハブ2,3に対して回転可能に端部リンク5,6を連結し、入力側および出力側の端部リンク5,6を中央リンク7に対して回転可能に連結してなる。一組のリンク機構4Bに、入力側の端部リンク5と出力側の端部リンク6とを互いに連動して回転変位させる連動手段9を設ける。一組のリンク機構4Aに、回転対偶の回転角を任意に変更可能か、または二つのリンク機構構成部材間の相対距離を変更させる二つ以上のアクチュエータ23,24を設ける。
(もっと読む)
四肢関節部装着装置
【課題】 2自由度の回転が可能で、外径寸法が小さいコンパクトな構成であり、四肢関節部回りに容易に装着できる四肢関節部装着装置を提供する。
【解決手段】 四肢関節部装着装置1は、入出力側にそれぞれ配されたリンクハブ2,3と、二組のリンク機構4A,4Bとを有する。リンク機構4A,4Bは、四つの回転対偶からなる三節連鎖のリンク機構であり、リンクハブ2,3に対して回転可能に端部リンク5,6を連結し、入力側および出力側の端部リンク5,6を中央リンク7に対して回転可能に連結してなる。入力側および出力側のリンクハブ2,3は、貫通した中空部20を有する。入力側および出力側のリンクハブ2,3間に四肢関節部が位置し、かつ各リンクハブ2,3の中空部20内に四肢関節部に続く部位がそれぞれ挿通された状態で四肢関節部回りに装着される。
(もっと読む)
リンク作動装置
【課題】 外径寸法が小さいコンパクトな構成であり、組立て易く、低コストで製作できるリンク作動装置を提供する。
【解決手段】 リンク作動装置1は、入出力側にそれぞれ配されたリンクハブ2,3と、二組のリンク機構4A,4Bとを有する。リンク機構4A,4Bは、四つの回転対偶からなる三節連鎖のリンク機構であり、リンクハブ2,3に対して回転可能に端部リンク5,6を連結し、入力側および出力側の端部リンク5,6を中央リンク7に対して回転可能に連結してなる。リンク機構4A,4Bは、それぞれのリンクハブ2,3と端部リンク5,6の各回転対偶軸O1A,O1B,O2A,O2Bが同一平面上にあって、かつ互いに交差する位置関係である。二組のリンク機構4A,4Bの少なくとも一組に、入力側の端部リンク5と出力側の端部リンク6とを互いに連動して回転変位させる連動手段9を設ける。
(もっと読む)
リンク作動装置
【課題】 コンパクトでありながら、可動部の可動範囲が広く、かつ姿勢調整精度が高く、しかも剛性が高いリンク作動装置を提供する。
【解決手段】 基端側のリンクハブ14に対し先端側のリンクハブを、3組以上のリンク機構11〜13を介して姿勢を変更可能に連結する。そのうちの少なくとも2組に、端部リンク部材11a〜13aを回動させて基端側のリンクハブ14に対して先端側のリンクハブの姿勢を任意に変更させるアクチュエータ30と、その動作量を端部リンク部材11a〜13aに減速して伝達する減速機構31とを設ける。減速機構31は、アクチュエータ30の駆動で回転させられる小歯車36と、端部リンク部材11a〜13aに設けられた大歯車37との噛み合いからなる歯車式の減速部33を有する。大歯車37のピッチ円半径は、端部リンク部材11a〜13aのアーム長Lの1/2以上とする。
(もっと読む)
遠隔操作装置
【課題】 可動部の可動範囲が広く、可動部をスムーズな動きで精度良く操作することができる遠隔操作装置を提供する。
【解決手段】 一次側のリンク装置2Aと二次側のリンク装置2Bとを備える。各リンク装置2A,2Bは、入力部材5に対し出力部材6を、3組以上のリンク機構10を介して姿勢を変更可能に連結する。入力部材5および出力部材6とリンク機構10の回転対偶部は、リンク機構10と一体に動作する軸部材20と、この軸部材20を回転自在に支持する軸受19とを有する。一次側および二次側のリンク装置2A,2Bにおける出力部材6とリンク機構10の回転対偶部の2つ以上に、軸部材20と一体に回動する一次側および二次側の回動部材31,32をそれぞれ設ける。一次側の回動部材31から二次側の回動部材32へ回動を伝達する回動伝達手段33を、入力部材5および出力部材6に形成された貫通孔16を通して設ける。
(もっと読む)
等速自在継手およびリンク作動装置
【課題】 入力部材の中心軸と出力部材の中心軸とが互いに平行で、両中心軸の軸間が広く離れていても等速回転を伝達することができる等速自在継手を提供する。
【解決手段】 入力部材2に対し出力部材3を、3組以上のリンク機構4を介して姿勢を変更可能に連結する。各リンク機構4は、入力部材2および出力部材3に一端がそれぞれ回転可能に連結された入力側および出力側のアーム部材5,6と、これら入力側および出力側のアーム部材5,6の他端にそれぞれ回転可能に連結された入力側および出力側のリンク部材7,8と、これら入力側および出力側のリンク部材7,8に両端がそれぞれ個別に回転可能に連結された中央側のアーム部材9と、この中央側のアーム部材9における両端の回転対偶部を結ぶ直線上の中点に回転可能に連結された中間部材10とを備える。
(もっと読む)
リンク作動装置
【課題】 コンパクトでありながら、可動部の可動範囲が広く、かつ姿勢調整精度が高く、しかも剛性が高いリンク作動装置を提供する。
【解決手段】 入力部材14に対し出力部材15を、3組以上のリンク機構11を介して姿勢を変更可能に連結する。リンク機構11は、入力側および出力側の端部リンク部材11a,11cと、中央リンク部材11bとでなる。リンク機構11は、各リンク部材11a,11b,11cを直線で表現した幾何学モデルが、中央リンク部材11bの中央部に対する入力側部分と出力側部分とが対称を成す形状である。3組以上のリンク機構11のすべてに、入力部材14に対して出力部材15を任意の姿勢で静止させることが可能な静止機構4を設ける。また、入力部材14および出力部材15にそれぞれ形成された被接触部に接触して入力部材14と出力部材15とを互いに連結する構造体5を設ける。
(もっと読む)
パラレルリンク機構および駆動ステージ
【課題】パラレルリンク機構のテーブルの位置精度を向上する。
【解決手段】パラレルリンク機構1は、ベース2と、ベース2に対して6自由度を有し、ベース2と対向して配置されるテーブル3と、一端がベース2に取り付けられ、他端がテーブル3に取り付けられる伸縮可能なロッド4を有する複数の連結部10と、テーブル3の位置の算出に用いる複数のセンサ部14とを備えている。センサ部14は、一端がベース2に取り付けられ、他端がテーブル3に取り付けられるワイヤ12と、ワイヤ12の長さを計測するセンサ13とを有している。
(もっと読む)
操作機構
【課題】 可動部の可動範囲が広く、可動部をスムーズな動きで精度良く操作することができる操作機構を提供する。
【解決手段】 操作機構1は、3組以上のリンク機構11Aを介して、固定部材4に対し入力部材15Aを姿勢変更可能に連結した入力側リンク作動装置2Aと、3組以上のリンク機構11Bを介して、固定部材4に対し出力部材15Bを姿勢変更可能に連結した出力側リンク作動装置2Bとを備える。リンク機構11A,11Bは、固定側の端部リンク部材1aと、入力側または出力側の端部リンク部材1cと、これら両端部リンク部材1a,1cを連結した中央リンク部材1bとでなる。入力側リンク機構11Aの固定側の端部リンク部材11aの回転を出力側リンク機構11Bの固定側リンク部材11aに伝達する回転伝達機構5を2組以上設ける。
(もっと読む)
多自由度位置決め装置および多自由度位置決め方法
【課題】簡易な構成で、エンドプレートおよびツールや治具の重量を支えることができ、また、駆動電流による発熱を抑制し、作業を行う際の駆動力を確保する。
【解決手段】ベースプレート2とエンドプレート4との間に接続された複数のリンク3と、各リンク3に取り付けられ、リンク3を駆動させるアクチュエータ6と、ベースプレート2とエンドプレート4との間に接続され、定常位置でのエンドプレート4およびエンドプレート4に取り付けられた物体の重量を支える重力補償装置5とを備えた。
(もっと読む)
5軸を有する力覚提示マニピュレータ
【課題】エンドエフェクタがマニピュレータのベースに対して、3自由度の並進運動および2自由度の回転動作を出力可能であり、小型で、広い範囲の回転動作が可能な力覚提示マニピュレータを提供する。
【解決手段】力覚提示マニピュレータは、マニピュレータのベース10と、エンドエフェクタ60と、エンドエフェクタ60を支持する3本のアーム20a、20b、20cと、エンドエフェクタ60と3本のアーム20a、20b、20cを連結する3本の連結リンク23a、23b、23cと、3本のアーム20a、20b、20cを駆動する駆動手段と、を備える冗長パラレルメカニズムを用いた構成となっている。
(もっと読む)
マニピュレータ及びその制御方法
【課題】減速機を使用せずに、バックドライバビリティを高めることができるマニピュレータを提案する。
【解決手段】マニピュレータ11は、第1乃至第5のリンク12乃至14並びに20及び21と、第1の可動スライダ15と、第2の可動スライダ22と、第1乃至第4の固定スライダ16及び17並びに23及び24と、第1乃至第4の駆動源8及び9並びに25及び26とを備える。第2乃至第4のリンクをスライドさせて、第1及び第2の可動スライダ15、22をスライドさせることにより、第1のリンク12を枢軸運動させて、第1のリンク12の速度を可変にして、しかもトルクを可変にする。
(もっと読む)
動力伝動装置
【課題】回転運動や往復運動を、揺動運動を介して回転トルクを高めて回転運動に変換可能な簡単な構成の動力伝動装置を実現する。
【解決手段】第1の往復回転歯車23と第2の往復回転歯車35は、それぞれ往復駆動歯車5に噛み合っており、往復駆動歯車5が時計方向に回転すると、第1の往復回転歯車23は反時計方向に回転して、第1の一方向クラッチ34を介して第1の一方向回転歯車26を反時計方向に回転させ、往復駆動歯車5が反時計方向に回転すると、第2の往復回転歯車35は反時計方向に回転して、第2の一方向クラッチ36及び回転方向変換用機構52を介して第2の一方向回転歯車38を反時計方向に回転させる。
(もっと読む)
多自由度移動体
【課題】可動部を高速移動できるようにする。
【解決手段】ベース部10と可動部5との間の距離が変化しても、伸縮リンク機構により構成された伝達機構7が伸縮して距離の変化に対応しつつ、電動機2dの回転運動を回転部8に伝達することができる。伸縮リンク機構として構成した伝達機構7は軽量なカーボン製とすることができるため、伝達機構7を軽量化でき、その結果、可動部5を高速動作させることが可能な多自由度移動体1を実現できる。
(もっと読む)
パラレルメカニズム及びパラレルメカニズムを用いた位置決め装置
【課題】部品等を高精度に、高い自由度で移動可能であり、また小型、軽量なパラレルメカニズム及びパラレルメカニズムを用いた位置決め装置を提供すること。
【解決手段】位置決め装置1は、パラレルメカニズム2と、パラレルメカニズム2を駆動するリニアアクチュエータ61,62,63,64と、リニアアクチュエータ61,62,63,64が載置されるベース3と、リニアアクチュエータ61,62,63,64を制御する制御部5とから構成されている。パラレルメカニズム2は、アーム10,20,30,40と、可動先端部60とから構成され、アーム10,20,30,40には、側面視円弧型のばね関節14〜16,24〜26,34〜36,44〜46が設けられている。従って、パラレルメカニズム2内の複数のばね関節の形状により変形方向を制御し、これら複数のばね関節の復元力を拮抗させることで動作精度と剛性を高めることができる。
(もっと読む)
往復回転機構
【課題】簡単かつ低コストで製造できる往復回転機構を提供する。
【解決手段】往復回転機構1は、モータの駆動により一方向に回転する入力軸3と、入力軸3の回転に連動して往復回転する出力軸7と、入力軸3と出力軸7の間に設けられた板バネ8よりなる伝動部材とを有している。モータを作動させるとその動力により入力軸3が回転し、それに伴って、入力軸3の先端にあるクランクアーム4とクランクピン43が一体となって旋回し続ける。この旋回動作に連動して、板バネ8が撓曲を繰り返しながら出力軸7を回転軸として揺動し、この揺動に連動して出力軸7が往復回転する。例えばこの往復回転機構を攪拌機に応用することで、往復回転式攪拌機を低コストで簡単に製造することができる。また、従来の往復回転機構で用いていた伝動アームに代えて板バネを利用することで構成部材が減るので、その分組立て工数が減り、簡単かつ低コストで製造することができる。
(もっと読む)
1 - 20 / 76
[ Back to top ]