
Fターム[3J062CA08]の内容
伝動装置 (28,056) | 歯車等往復運動と非無限回転運動の変換装置 (1,025) | 特徴となる伝動手段 (676) | 可撓部材 (221) | 複数の可撓部材 (29)
Fターム[3J062CA08]に分類される特許
1 - 20 / 29
垂直多関節ロボット
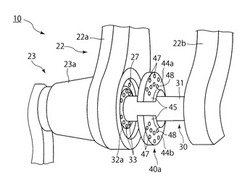
【課題】基端側アームの内部に設けられたタイミングベルトやプーリを目視で確認したり、タイミングベルトやプーリにチェックマークを施したりする作業を簡単に実施可能な垂直多関節ロボットを提供する。
【解決手段】垂直多関節ロボット10は、互いに間隔を空けて配置された一対の基端側アーム体22a、22bを有する基端側アーム22と、基端側アーム22に対して回動自在に取り付けられた先端側アーム23とを備えている。一対の基端側アーム体22a、22bの間に筒状のリンク部材30が設けられ、リンク部材30の両端部に、フランジ40a、40bがリンク部材30に対して取外し可能に装着されている。各フランジ40a、40bは、対応する基端側アーム体22a、22bに対して取外し可能に連結され、各フランジ40a、40bは、複数の分割されたフランジ部材44a〜44dから構成されている。
(もっと読む)
アクチュエータおよびリンク機構

【課題】見かけ上、非線形な弾性係数を有するアクチュエータおよびリンク機構を提供する。
【解決手段】直動可能に支持された基台20に、第1のプーリ22aおよび第2のプーリ22bが一体に回転可能に支持されている。第1のプーリ22aには、第1のワイヤ17aが巻き付けられており、第1のワイヤ17aの出力端Toが負荷に接続されている。第2のプーリ22bには、第2のワイヤ17bが第1のワイヤ17aとは逆方向に巻き付けられている。基台14には、取付部材12が連結されている。駆動源3は、基台3および取付部材12を一体に直動させる。取付部材12にはバネ4の一端が接続され、バネ4の他端が第2のワイヤ17bに接続されている。
(もっと読む)
プッシュロータリー式無段変速機構
【課題】 可撓体の内側径を変更せしめるパワーローラーの公転する形で押し回し、従来の摩擦式動力伝達手段による無断変速駆動を可撓体連続往復駆動とその距離の変更で可能とする。
【解決手段】 回転入力を介して外周枠5で支持する中心軸外周を回り該外周枠5で支持する回転体3a、b、cに支持された可撓体1a、b、cの内側を中心軸と外周枠5の間で可動図るパワーローラー2a、b、cの公転で押し回す構成で可撓体1a、b、cの連続往復駆動と駆動幅を変更して無断変速駆動にあてる外周枠5の入力或いはパワーローラー2a、b、cの公転入力を許可する。
(もっと読む)
ロボット
【課題】電動モータの駆動力の増大を抑制した態様にて、ロボットの伸縮動作を確保すること。
【解決手段】フレーム間の相互変位に応じて伸縮可能に構成されたロボット100であって、ロボット100の基端側から先端側へ順に配置されるべきフレーム14、13、15と、電動モータ1から供給される駆動力に基づいてフレーム13を先端側へ駆動する駆動手段と、駆動手段と協調してフレーム13を先端側へ付勢する付勢手段と、駆動手段及び付勢手段によるフレーム13の先端側への搬送に同調して、前記フレーム13からみてフレーム14、15を互いに逆方向へ搬送する搬送機構と、を備える。例えば、付勢手段は、ガススプリングから構成される。
(もっと読む)
伝達機構
【課題】互いに独立した二つの入力を一つの出力として取出し可能で、かつ、電気制御機器の附加や防水性の配慮を不要にしてコストを抑えることができる伝達機構を提供する。
【解決手段】伝達機構22は、二つの独立した入力部材としてスロットルレバー73および伝達レバー74を備え、一つの出力部材として湾曲アーム75を備える。さらに、スロットルレバー73にカム部86を備える。カム部86は、スロットルレバー73が矢印A方向にスイング移動をしたとき湾曲アーム75のスイング移動を許容するように変位可能なカム面87を有する。カム面87は、伝達レバー74が矢印E方向にスイング移動をしたとき、湾曲アーム75が乗り越えつつスイング移動することを許容する形状に形成されている。
(もっと読む)
連結ユニットおよび同期駆動システム
【課題】高い精度での同期駆動を図ることができるとともに、コスト面で優位な連結ユニットとこれを備える同期駆動システムを提供する。
【解決手段】連結ユニット20は、ヘッドがスライド駆動するスライド駆動装置に対して連結されるユニットであり、ケース200と、ケース200内に収納されたスプロケット203,204と、その間にループ状に張設されたチェーン205と、チェーン205に取り付けられたブラケット201と、スプロケット204に対して取り付けられたロッドカップリング202とを有する。そして、ブラケット201が矢印Aのようにスライド駆動した場合、ロッドカップリング202は、ブラケット201の変位に応じた回転角度を以って回動する。
(もっと読む)
関節駆動装置及び多軸マニピュレータ
【課題】関節駆動装置の数を関節の数と等しくすることができ、駆動力伝達用の線状部材の経路長の変化を各関節部で解消することができるとともに、駆動力伝達用の線状部材の交換を短時間で容易に行うことができ、利便性を高めることができるようにする。
【解決手段】所定のリンク部材と次のリンク部材とを回転可能に接続する関節軸上に配設された関節部の駆動用の線状部材から駆動力を受けて回転することによって所定のリンク部材に対して次のリンク部材を回転させる被駆動部材と、関節軸上に配設された経路長補償ユニットであって、所定のリンク部材に対応して配設された他の関節部の駆動用の線状部材からの駆動力を、次のリンク部材に対応して配設された他の関節部の駆動用の線状部材に伝達するとともに、他の関節部の駆動用の線状部材の経路長の変化を吸収する経路長補償ユニットとを有する。
(もっと読む)
左右連動操作装置
【課題】ユニバーサルジョイントを用いずに左右の操作部を良好に連動させることができ、ユニバーサルジョイントのがたつき発生による不具合を防止する。
【解決手段】左操作部8と右操作部9との間に左右連動機構10を備える。例えば左操作部8の左グリップ8aを第1軸線12を中心に矢印A方向へ回動操作すると、その回動操作力は、左第1傘歯車20、左第2傘歯車22、左第1平歯車24、左第2平歯車25、第1線条部材41,42、右第2平歯車35、右第1平歯車34、右第2傘歯車32、右第1傘歯車30を介して右操作部9に伝達されて、右グリップ9aが左グリップ8aと同様の操作方向に動作する。また、左操作部8を第2軸線16を中心に矢印B方向へ揺動操作すると、その揺動操作力は、左回転体27、第2線条部材43,44、右回転体37を介して右操作部9に伝達されて、右操作部9が左操作部8と同様の操作方向に動作する。
(もっと読む)
マニピュレータ用関節部
【課題】組立てが容易でコストの低減化を図り、高精度のマニピュレータ動作を行うことができる小型のマニピュレータ用関節部を提供する。
【解決手段】基部アーム及び回動アームの端部同士を連結し、端部を支点として前記回動アームを回動させるマニピュレータ用関節部である。マニピュレータ用関節部は、基部アームの端部に配設された関節軸と、回動アームの端部に形成されたユニット装着孔に嵌合する円筒状のハウジングと、該ハウジングの内部に配設され回動アームを関節軸に対して回転自在に支持する複列の転がり軸受と、を有する軸受ユニットと、を備える。ハウジングには、軸方向一方側の外周面に外径側に突出する鍔部が形成され、軸方向他方側の外周面に雄ネジ部が形成され、雄ネジ部にナットを螺合させることにより、回動アームが鍔部とナットに挟まれて軸受ユニットに固定される。
(もっと読む)
ケーブル類保護案内装置用可動式ガイドローラ
【課題】ケーブル類保護案内装置の移動量が変わっても確実に支持することができるケーブル類保護案内装置用可動式ガイドローラを提供する。
【解決手段】ケーブル固定端部とケーブル移動端部とを有するケーブル類を曲げ返した状態で保護案内するケーブル類保護案内装置200の曲げ返し部と移動端部206との間に配設されケーブル類保護案内装置200を下方より支持する支持ローラ150、160を有するケーブル類保護案内装置用可動式ガイドローラ100において、ケーブル類保護案内装置200の移動端部206が、直径Dの一対の主プーリ122に掛架されたベルト132に固設されており、支持ローラが、主プーリと同じ回転軸に固設された直径dがD/2<d<Dの一対の副プーリ124、126に掛架されたベルト134、136に固設されていることによって、上記の課題を解決する。
(もっと読む)
ロボットおよびその制御装置
【課題】 関節の姿勢角度と剛性を独立に制御し、良好な安全性と優れた制御性能を共に達成することができる関節ロボットおよびその制御装置を提供することを目的とする。
【解決手段】 基部と、基部に設置された4つのモータと、4つのモータに各々取り付けられた4つの巻取装置と、基部の表面に軸中心線が垂直するように設置された支持柱と、支持柱の上端に取り付けられた球面ジョイントと、球面ジョイントに取り付けられた可動プレートと、可動プレートの底部に設置された4つの自在継手と、4つの前記巻取装置と4つの前記自在継手とを一対一に連結する非線形バネが組み込まれた4本のワイヤと、可動プレートの上面に軸中心線が垂直するように固定された出力軸とを備えた。
(もっと読む)
マニピュレータ
【課題】開閉するエンドエフェクタを機械的に駆動操作する操作部における操作性を向上させる。
【解決手段】マニピュレータ10は、グリッパ軸入力部104を含む操作部14bと、エンドエフェクタ1300の向きを変える1以上の姿勢軸を含む先端動作部12と、操作部14bと先端動作部12を連結する連結シャフト18と、姿勢軸を駆動するモータ60、62と、グリッパ軸入力部104の人手による操作を機械的に伝達して、エンドエフェクタ1300を駆動するエンドエフェクタ駆動機構1320aとを有する。グリッパ軸入力部104は、開閉軸106を基準にして開閉する第1指掛部108及び第2指掛部110を備える。第1指掛部108は固定され、第2指掛部110が第1指掛部108に対して相対的に開閉動作し、第1指掛部108と第2指掛部110が閉じることによってエンドエフェクタ1300が閉じる。
(もっと読む)
回転運動伝達装置及び自動車用ステアリング装置
【課題】回転運動が所定の角度範囲に規制される装置に用いられる回転運動伝達装置において、ケーブルに作用する負荷を低減することができる技術を提供する。
【解決手段】回転運動伝達装置は、ハンドル2の軸に連結されているシャフト22aと、ハンドル側ドラム24aと、第1ケーブル12aと、第2ケーブル12bと、操舵側ドラム24bを備えるとともに、シャフト22aの回転角度範囲を規制する回転角度規制装置62が設けられている。そのため、操舵機構8の操舵角範囲に応じてシャフト22aの回転角度範囲を規制することができる。これによって、シャフト22aを操舵機構8の操舵角範囲を超えて回転させようとしても、シャフト22aの回転が回転角度規制装置62によって規制され、第1ケーブル12aと第2ケーブル12bに過大な力が作用することが防止される。
(もっと読む)
回転運動伝達装置及び自動車用ステアリング装置
【課題】組み付け作業性の良い回転運動伝達装置を提供することを目的とする。
【解決手段】 入力側ドラムと、入力側ドラムを収容する入力側ハウジングと、出力側ドラムと、出力側ドラムを収容する出力側ハウジングと、入力側ドラムの回転を出力側ドラムに伝達する二本のケーブルを備え、二本のケーブルは、ハンドル側ドラム及び操舵側ドラムの外周に互いに異なる巻き方向に巻き付けられ、ハンドル側のドラムの正逆方向の回転に伴って交互に引張力が作用するように巻き取り及び引き出しが行われるようにしてある。前記入力側ドラムと出力側ドラムの少なくとも一方が同軸の二枚のプーリーを組み合わせてなるものであり、それら二枚のプーリーの一方の外周に一方のケーブルが巻き付けられており、他方のプーリーの外周に他方のケーブルが巻き付けられている。
(もっと読む)
高速アプリケーション用多軸ロボット
【課題】位置決め精度を高めたベルト駆動設計の多軸ロボットを提供する。
【解決手段】互いに実質的に平行に配置されている第1ガイドレールと第2ガイドレール12,14とを具備する。第1端18および第2端20を有するクロスバー16が、ガイドレール12,14に作動可能に支持されている。第2運動軸66に沿って移動させるために、搬送台22が前記クロスバー16に作動可能に連結されている。第1および第2ドライブと、第1ベルト32とを有する第1駆動システムは、第1および第2運動軸66に沿った搬送台22の移動を提供する。第2および第3ベルト34,36は別々の第2および第3ベルト経路を走行し、第2および第3ベルト34,36の一方は右回りでクロスバー16に進入するとともに、左回りでクロスバー16から離れ、第2および第3ベルトの他方が左回りでクロスバー16に進入するとともに、右回りでクロスバー16から離れる。
(もっと読む)
画像読取装置及びそれを備えた画像形成装置
【課題】キャリッジを安定して、正確に移動させることができる画像読取装置とそれを備えた画像形成装置を提供する。
【解決手段】画像読取装置5は、走査方向に移動可能に支持された第1及び第2キャリッジ71、72と、これらのキャリッジ71、72を接続した一対の駆動ワイヤ26aと、各駆動ワイヤ26aが巻回された一対の駆動プーリ25と、この一対の駆動プーリ25を両側で固定する駆動軸231とを備え、一対の駆動プーリ25の回転により各駆動ワイヤ26aを駆動し、第1及び第2キャリッジ71、72を移動させて、原稿面を走査しつつ該原稿面からの反射光をイメージセンサに入光させることにより原稿画像を読み取る。一対の駆動プーリ25は、駆動軸231上で同じ方向を向けて固定され、一対の駆動ワイヤ26aは、各駆動プーリ25に同じ方向に巻回される。
(もっと読む)
回転駆動装置を用いたロボットマニプレータ
2自由度の位置決めマニプレータ装置を提供する。前記装置は、第1従動軸線の周りで回転可能な第1従動部材と、前記従動軸線の周りで前記第1従動部材を回転させるために前記第1従動部材に連結される第1駆動部材と、前記第1従動部材に固定して接続されたリンク部材と、を含む。
前記装置は、第2従動軸線の周りを回転するために前記リンク部材に回転可能に取り付けられた第2従動部材と、前記第2従動軸線は前記第1従動軸線と概ね並行であり、前記第2従動軸線の周りで前記第2従動部材を回転させるために駆動点において前記第2従動部材に連結される第2駆動部材とを更に含む。
前記駆動点は前記第1従動軸線と概ね一致する。
(もっと読む)
ワイヤ駆動機構、ロボットアーム機構及びロボット
【課題】軽量で、コンパクトにできるワイヤ駆動機構、ロボットアーム機構及びロボットを提供する。
【解決手段】回転軸2を中心に回転するプーリ1と、回転軸2と直交する方向で、回転軸2と同一平面上にあるように配置される回転軸4を中心に回転するプーリ3と、プーリ1周面の所定方向に巻きつけられるとともに、プーリ3周面にプーリ1の巻きつけ方向と反対方向に巻きつけられるワイヤ5を有し、一方のプーリ1の回転によるワイヤ5の引っ張り力により他方のプーリ3に駆動力を伝達可能にする。
(もっと読む)
マニピュレータ機構
【課題】十分な強度の付与と軽量化を両立させることが出来、然も過大な外力の作用によってアームが折れ曲がったときにも復旧が可能な伸縮式のマニピュレータ機構を提供する。
【解決手段】本発明に係るマニピュレータ機構は、先端部に先端機構3を具えたアーム1と、該アーム1の基端部が連結されて該アーム1の巻き取り及び繰り出しを行なうアーム繰り出し装置2とを具え、アーム1は、弾性を有する複数本のテープ41を束ねてなるテープ集合体4と、該テープ集合体4の長手方向に間隔をおいてテープ集合体4に装着された複数の拘束部材5とを具え、該拘束部材5には、前記複数本のテープ41が貫通して該複数本のテープ41の相対位置を一定に保つためのガイド溝51が開設されている。
(もっと読む)
簡潔移動装置
【課題】 本発明の簡潔移動装置は、プランタン、家具、スライドドアなどの移動体の水平移動や、洗面台の洗面部などの移動体の垂直移動を簡潔構造で行う簡潔移動装置を提供すること。
【解決手段】 本発明の簡潔移動装置10は、駆動モータ11により駆動する駆動ギア12と、駆動ギア12に連結する第1のギア13に取付けられ回動する第1のローラ14と、第1のギアに連結する第2のギア15に取付けられ回動する第2のローラ16と、第1のローラ14に一端が固定され巻き取り巻き戻しが行われる第1のベルト17と、第2のローラ16に一端が固定され、第1のベルト17の巻き取りが行われるとき巻き戻しが行われ、第1のベルト17の巻き戻しが行われるとき巻き取りが行われる第2のベルト18とを備え、第1、第2のベルト17、18の巻き取り巻き戻しにより箱形の移動体の移動を行うこととした。
(もっと読む)
1 - 20 / 29
[ Back to top ]