
Fターム[3J062CD50]の内容
伝動装置 (28,056) | 送り機構の特徴 (5,816) | その他の細部 (2,182) | ねじ軸 (484) | 複数のねじ軸を持つもの (65) | 複数のねじ軸を直列に連結したもの (20)
Fターム[3J062CD50]に分類される特許
1 - 20 / 20
反動吸収装置及び半導体組立装置
【課題】本発明は、軽量化を図った反動吸収装置を提供すること、あるいは軽量化を図った反動吸収装置を用い、更に処理時間を短い生産性或いは品質の高い半導体組立装置を提供することである。
【解決手段】本発明は、装置ベースと、装置ベースに固定された支持体と、第1のボールネジと、前記第1のボールネジによって所定方向に移動され、少なくとも半導体を組み立てる処理ヘッドを負荷とする負荷ユニットと、前記所定方向と逆の方向に反力を発生させる第2のボールネジと、前記第1のボールネジと前記第2のボールネジを駆動する動力源を有する駆動ユニットと、を具備するカウンタ機構部と、前記支持体と、前記カウンタ機構部を前記第2のボールネジにより移動可能に支持する支持部材とを備えている反動吸収ユニットを有することを特徴とする。
(もっと読む)
電動シリンダ

【課題】必要な最大推力を維持しながらロッドの動作時間による生産効率の低下を抑制する電動シリンダを提供する。
【解決手段】本電動シリンダ1は、ボールねじ軸6に設けた、リードが互い相違する小リードねじ部10及び大リードねじ部11と、シリンダ本体2内に軸方向に移動自在に、且つ回転不能に配置され、小リードねじ部10に各ボールを介して螺合可能な第1ピストン12と、シリンダ本体2内に軸方向に移動自在に、且つ回転不能に配置され、大リードねじ部11に各ボールを介して螺合可能な第2ピストン13と、第1ピストン12と第2ピストン13との間に配置されたコイルスプリング14と、第1ピストン12に連結され、先端部がシリンダ本体2の底部から突出するロッド15とを備えたので、必要な最大推力を維持しながらロッドの動作時間による生産効率の低下を抑制することができる。
(もっと読む)
駆動力伝達機構
【課題】駆動部の回転方向を切り換えることで第1被駆動部または第2被駆動部に駆動力を選択的に伝達する駆動力伝達機構においてその機構の専有スペースを小さくすること。
【解決手段】歯車7(駆動部)が第1の方向に回転駆動されたとき、雄ネジ7Dと雌ネジ9Bとの螺合が解除されると共に雄ネジ7Bと雌ネジ5Bとが螺合して、歯車7は歯車5(第1被駆動部)に近接する方向に軸3に沿って摺動する。そして、雄ネジ7Bと雌ネジ5Bとの螺合がある程度進行すると、その螺合によって歯車7と歯車5とが一体に回転する。逆に、歯車7が前記第1の方向とは逆方向に回転駆動されたとき、雄ネジ7Bと雌ネジ5Bとの螺合が解除されると共に雄ネジ7Dと雌ネジ9Bとが螺合して、その螺合がある程度進行すると歯車7と歯車9(第2被駆動部)とが一体に回転する。
(もっと読む)
制振ダンパー装置
【課題】変位増幅機構で相対変位する部材間の相対変位を効率的に増幅させることができると共に、変位増幅機構から制振ダンパーに伝達される変位のロスを少なくすることができる。
【解決手段】互いに相対変位する下階梁(第1部材)32および上階梁(第2部材)33の間に介装され、下階梁32と上階梁33との相対変位を増幅させる変位増幅機構10と、一方の端部40aが下階梁32に固定され、他方の端部40bが変位増幅機構10と接続される制振ダンパー40と、を備える。
(もっと読む)
多段直動アクチュエータ及びロボットハンドの指機構
【課題】ロボットハンドの指機構の屈伸用駆動系の簡素化を可能とするようなアクチュエータの提供。
【解決手段】進退動を行う直動軸3(3a、3b、3c)を有した複数の直動モータ2(2a、2b、2c)を組み合わせて多段直動アクチュエータ1を形成する。それについて、直動モータそれぞれの直動軸を中空構造として軸腔を有するように形成し、そして隣接前段の直動モータの直動軸の軸腔に対し隣接後段の直動モータの直動軸が挿通するように、各直動モータを組み合わせることで、各直動モータそれぞれの直動軸が同一の軸芯上で個々に進退動をなせるようにしている。
(もっと読む)
ストッパ付空気ばね
【課題】ダイヤフラムへの空気給排による高さ調節に伴うストッパの高さ調節が、従来に比べて簡便に行えるように改善された空気ばねを提供する。
【解決手段】車体側の外筒1と、台車側の内筒2と、ゴム製ダイヤフラム3とで成る空気ばね部aを有し、ダイヤフラム3の圧縮量が所定値になると、共にダイヤフラム3内に配置される上ストップ部材5と下ストップ部材15とが当接して外筒1の過剰下降が規制される下降規制手段Sを持つトッパ付空気ばねにおいて、下ストップ部材15の高さを無段階に変えて圧縮量を調節する高さ調節装置12と、下ストップ部材15の高さ位置を変更調節する操作をダイヤフラム3の外側にて行う操作機構13を有する。
(もっと読む)
回転慣性質量ダンパー
【課題】大型化することなく、大きな慣性質量効果を得ることができる回転慣性質量ダンパーを提供する。
【解決手段】当接離間する方向に相対変位する第1部材および第2部材の間に介装され、相対振動を低減するための回転慣性質量ダンパー40において、変位増幅機構を備え、変位増幅機構は、ねじ部と、ねじ部を挿通可能なナットと、ねじ部とナットとの間に配されたボールベアリングと、を有するボールねじ21,22と、ねじ部またはナットとともに回転可能に配された回転錘31と、を備え、回転錘を境界にして両側に第1ねじ部11および第2ねじ部12がそれぞれ配されるとともに、第1ねじ部が挿通された第1ナット13および第2ねじ部が挿通された第2ナット14が配され、第1ねじ部および第1ナットの間に配された第1ボールベアリングの第1リードと、第2ねじ部および第2ナットの間に配された第2ボールベアリングの第2リードと、が異なっている。
(もっと読む)
反動吸収装置及び半導体組立装置
【課題】本発明は、軽量化を図った反動吸収装置を提供すること、あるいは軽量化を図った反動吸収装置を用い、更に処理時間を短い生産性或いは品質の高い半導体組立装置を提供することである。
【解決手段】本発明は、第1のボールネジによって所定方向に移動される負荷ユニットと、前記所定方向と逆の方向に反力を発生させる第2のボールネジと、前記第1のボールネジと前記第2のボールネジを駆動する駆動モータを有する駆動ユニットとを具備するカウンタ機構部を有する反動吸収装置において、一端側は前記第2のボールネジと結合するナットを具備し、他端側は前記カウンタ機構部と相対的に移動可能な装置ベースに固定されている反動吸収ユニットを有することを特徴とする。
(もっと読む)
直動装置
【課題】進み角の差異によるメリットをより有効活用すること。
【解決手段】進み角が異なるねじ部を有した駆動軸51と伝達軸71との間にクラッチ機構60を介在させ、かつ回転体30に対する第1ハウジング10および第2ハウジング20の相対的な回転を規制する固定体52およびスプリング73を設けている。このため、クラッチ機構60を伝達状態と非伝達状態とに切り替えることにより、回転動作させるねじ部を選択的に変更することが可能となる。
(もっと読む)
直進・回転機構
【課題】簡素な構造で製造コストを削減できる直進、回転機構を提供する。
【解決手段】シャフト3a,3bを平行に固定して設置した1対のシャフトリニアモータ1a、1bの可動部2a,2bに、それぞれ各シャフトの中心軸に平行な回転軸を有する螺合部材であるボールナット21a、21bを固定する。これらのボールナット21a、21bは、1本のボールネジ4の正リード部41と逆リード部42にそれぞれ螺合しているのであるが、2箇所のリード部は逆方向にネジが切ってある。このように構成することによって、可動部2a、2bの動作方向と速度を制御することによって、ボールネジ4の直進運動と回転運動を同時に制御できる。
(もっと読む)
回転−直動変換機構およびアクチュエータ
【課題】小型化と大きな動作量という相反する2つの技術的課題を同時に達成することができる回転−直動変換機構およびアクチュエータを提供する。
【解決手段】回転−直動変換機構3は、遊星歯車機構5と、第1、第2のねじ棒8、32と、送り部材7と、主軸9およびスリーブ33を備えている。遊星歯車機構5は、モータ4によって太陽歯車20を駆動し、遊星歯車24を回転させるとともに公転させる。第1のねじ棒8は、送り部材7に一体に設けられ、主軸9を直動させる。第2のねじ棒32は、遊星歯車軸23に一体に設けられている。送り部材7は、遊星歯車24の公転にともなって回転するとともに第2のねじ棒32に沿って直動する。スリーブ33は、カバー2Bに回転を防止されて摺動自在に支承され、送り部材7と一体に進退する。
(もっと読む)
直動装置
【課題】進み角の差異によるメリットを有効活用した上で、進み角が小さいねじ部で回転動作している状態においてハウジングと駆動軸とを軸方向に沿って相対移動させるべく操作力が加わった場合に、この操作力によってハウジングと駆動軸とを軸方向に沿って相対移動させること。
【解決手段】回転体30が、駆動めねじ部34を介して駆動軸50の駆動おねじ部51に螺合する一方、駆動軸50の駆動ねじ部51よりも小さい進み角で形成した伝達おねじ部36を介してハウジング20に螺合している。このため、軸方向に操作力が加わった場合に、進み角が大きい駆動めねじ部34および駆動おねじ部51が回転動作することになり、ハウジング20と駆動軸50とを軸方向に沿って相対移動させることができる。これにより、バックドアDの開閉操作によって、車両の取り付け部分に負荷がかかる事態を防止することができる。
(もっと読む)
多段構造のアクチュエータ
【課題】長尺の案内レールを使用することなく被駆動体をロングストロークにわたって搬送可能とする。
【解決手段】この多段構造のアクチュエータ1は、複数の駆動ユニット10A〜10Dそれぞれが、二つのボールねじ11A,11Bを有している。二つのボールねじ11A,11Bは、相互のナット5,5が逆方向に駆動され、また、隣り合う駆動ユニット10A〜10Dのナット5,5相互が連結されている。さらに、各駆動ユニット10A〜10Dには、案内レール2が取り付けられ、これを支持する複数の案内部材3は、各駆動ユニット10A〜10D毎に軸方向に離間してベースBに配置されている。そして、各案内レール2は、各駆動ユニット10A〜10Dの移動に伴って、複数の案内部材3に順次に受け渡されるようになっている。
(もっと読む)
スライド駆動装置
【課題】一の駆動源により複数のヘッドをスライド駆動させることができるとともに、複数のヘッドにおけるヘッド同士のピッチを高い自由度を以って設定することができるスライド駆動装置を提供する。
【解決手段】スライド駆動装置1は、固定ヘッド30と可動ヘッド31とが、ボルト303とナット316とにより連結されている。また、可動ヘッド31と可動ヘッド32とが、ボルト313とナット326により連結され、可動ヘッド33と可動ヘッド33とがボルト323とナット336により連結されている。ボルト303,313,323には、それぞれギア301,302,311,312,321,322を介して回転駆動力が伝達される。ここで、ギア301はシャフト21に固定されており、ギア311,321はシャフト21の延伸方向にスライド自在となっている。
(もっと読む)
直動装置
【課題】進み角の差異によるメリットをより有効活用すること。
【解決手段】進み角が異なるねじ部を有した駆動軸51と伝達軸71との間にクラッチ機構60を介在させ、かつ回転体30に対する第1ハウジング10および第2ハウジング20の相対的な回転を規制する固定体52およびスプリング73を設けている。このため、クラッチ機構60を伝達状態と非伝達状態とに切り替えることにより、回転動作させるねじ部を選択的に変更することが可能となる。
(もっと読む)
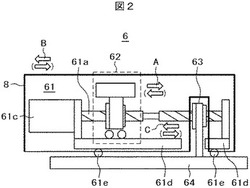
送りねじ装置
【課題】必要なストロークを確保しつつ、小型化が可能な送りねじ装置を提供する。
【解決手段】大径ナット140が回転駆動されると、大径ナット140が螺合する大径ねじ軸130及び大径ねじ軸130と一体をなす小径ナット120に回転力が作用することとなり、更に、小径ナット120が螺合する小径ねじ軸110にも回転力が作用することとなる。一方、小径ねじ軸110は、ねじ軸を中心とした回転方向の動きが拘束されており、回転することはない。そのため、大径ナット140が回転駆動されると、小径ねじ軸110に対して小径ナット120が回転すると共に、大径ねじ軸130に対して大径ナット140が回転することとなる。そうすると、小径ねじ軸110と大径ねじ軸130とで、ねじの方向が同じなので、大径ナット140の回転に伴って大径ねじ軸130が直線運動を行うと共に、小径ナット120の回転に伴って小径ねじ軸110が、大径ねじ軸130と同一方向に直線運動を行う。
(もっと読む)
多重嵌合伸縮軸
【課題】高い強度を備えた伝達軸を用いて、耐久性の高い多重嵌合伸縮軸を提供する。
【解決手段】第1伝達軸の回転を、第1伝達軸の第1被係合部に係合された第1係合部により第2伝達軸に伝達させるようにし、かつ、第2伝達軸の回転を、第2伝達軸の第2被係合部に係合された第2係合部により第3伝達軸に伝達させるとともに、第1伝達軸の第1雄ネジを、第1移動パイプの第1ナット部にネジ嵌合し、第2伝達軸の第2雄ネジを、第2移動パイプの第2ナット部にネジ嵌合し、さらに、第3伝達軸の第3雄ネジを、第3移動パイプの第3ナット部にネジ嵌合し、第1伝達軸の回転を、第2伝達軸及び3伝達軸に伝達するとともに、第1、第2、及び第3移動パイプを軸方向に移動させる。
(もっと読む)
アクチュエータ及び伸縮ユニット
【課題】コスト高を招くことなく、長いストロークを有して、コンパクトで強度を確保できるアクチュエータを提供する。
【解決手段】互いに並行して配置されたロッド11及びロッド21と、回転に応じてロッド11を一方向に伸縮する第1伸縮機構と、回転に応じてロッド21を第1伸縮機構と逆方向に伸縮する第2伸縮機構と、第1伸縮機構及び第2伸縮機構を同期して回転させる駆動部6とを備えるという構成を採用することによって、伸縮する長尺部材を並行に各々別軸上に設けて、一つの駆動装置によって伸縮させる。
(もっと読む)
位置決め調整ネジ
【課題】加工が簡単であり、簡易な操作により微細な位置決め調整を可能とした位置決め調整ネジをを提供する。
【解決手段】固定体1に移動可能に設けた位置決め部材2の位置決め調整ネジであって、ピッチ大のネジ6の先端にピッチ小のネジ5を形成したネジ構成よりなり、前記位置決め部材2の一側方で前記固定体1に固設したネジ穴を有する固定部材8に前記ピッチ大のネジ6をねじ込み、その先端のピッチ小のネジ5を前記位置決め部材2にねじ込んだ。
(もっと読む)
調整装置及び調整システム
【課題】安価で簡単な機構により被調整体の位置及び姿勢の調整を可能とさせる高精度の位置及び姿勢の調整装置を提供する。
【解決手段】調整装置13は、長手軸線方向に伸縮可能な伸縮機構と、該伸縮機構の先端に取付けられた自在機構47とを備え、伸縮機構を伸縮させることにより自在機構47を介して被調整体である支持台15の位置及び姿勢を調整する。自在機構47は、長手軸線方向に直交する面に沿って移動可能な平面移動機構と、長手軸線方向に対して揺動可能な揺動装置23とを有する。
(もっと読む)
1 - 20 / 20
[ Back to top ]