
Fターム[3J070AA04]の内容
機械式制御装置 (8,193) | 操作部材の種類、形式 (1,516) | 人間が直接操作するもの (1,506) | 手で操作するもの (973) | 揺動レバー (511) | ジョイスティックレバー (163)
Fターム[3J070AA04]に分類される特許
1 - 20 / 163
自動車
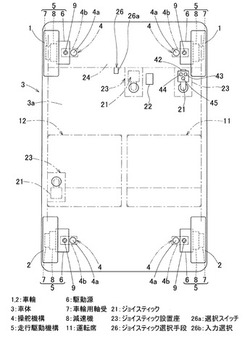
【課題】 その場回転や、横方向移動等が可能な自動車において、運転者による運転操作の操作性の向上を図る。
【解決手段】 3輪以上の車輪1,2を有し、全車輪1,2に独立して転舵可能な転舵機構4を有し、各車輪1,2のうちの駆動輪は、各々独立して原動機6を含む走行駆動機構5により走行駆動される自動車に適用する。走行駆動機構5は、例えばインホイールモータ駆動装置とする。転舵機構4の操作および走行駆動機構5の駆動の操作を行うジョイスティック21を有する。
(もっと読む)
小型多自由度の力覚提示マニピュレータ

【課題】高品質な力覚提示性能を有し、小型であり、かつ広い作業領域を有する力覚提示マニピュレータを提供する。
【解決手段】力覚提示マニピュレータは、マニピュレータのベースと、エンドエフェクタと、駆動手段と、駆動手段の動力をエンドエフェクタの並進3自由度動作に変換するパラレルリンク機構と、を備える。エンドエフェクタは、パラレルリンク機構の機械的拘束により、空間位置に依らず姿勢を維持する。本発明によれば、力覚提示装置にパラレルリンク機構を用いることにより、高剛性、高出力、高バックドライバビリティ、低慣性を実現可能なため、高品質な力覚提示が可能である。また、本発明のパラレルリンク機構は、機構と駆動手段が一側方へ配置可能であるため、2つのパラレルリンク機構をジンバル機構で連結した、小型な回転自由度を有する多自由度力覚提示マニピュレータが実現可能である。
(もっと読む)
肘掛型遠隔操縦装置
【課題】長時間使用しても疲れないように手首を含む肘をのせたまま操縦できる遠隔操縦装置を開発すること。
【解決手段】肘掛部材(10)、第1、2連結部材(31、32)、ベース連結部材(40)が平行四辺形をなし第1連結部材の垂直軸に対する傾斜角度を検出する第1角度検出手段とベース連結部材の第3連結軸まわりの角度を検出する第2角度検出手段とベース部材の垂直軸部材まわりの角度を検出する第3角度検出手段と、第1連結部材の傾斜角に応じて復元力を生成する第1のバネ機構と肘掛部材の傾斜角に応じて復元力を生成する第2のバネ機構とを備える。バネ(12,13,33,34)の端部に取り付けたワイヤ(16,38)がバネ機構を含む肘掛部材の重量と肘掛部材に載置されたオペレータの手首を含む肘の重量とバランスするように非円形プーリ(23、43)に巻張されている。
(もっと読む)
シフト装置
【課題】操作レバーを複数方向に操作可能なシフト装置において、操作レバーの操作によって車両状態をユーザに認知させることができるシフト装置を提供する。
【解決手段】シフトレバー4は、シフト方向及びセレクト方向の2方向に回動操作可能である。シフト機構3は、シフト方向に操作されたシフトレバー4に節度を付与するシフト側節度用モータ24と、セレクト方向に操作されたシフトレバー4に節度を付与するセレクト側節度用モータ25とを備える。これら節度用モータ24,25は、車速に応じた回転数(回転トルク)にて回転することにより、シフトレバー4に車速に応じた節度感を発生させる。
(もっと読む)
多方向入力装置
【課題】装置全体の薄型化が可能な多方向入力装置を提供すること。
【解決手段】多方向入力装置は、操作部材を傾倒操作前の初期状態に復帰させる弾性部材を備え、弾性部材は、平面視して第1連動部材5および第2連動部材6の間に位置する4箇所にそれぞれ設けたコイルばね3a、3b、3c、3dで構成されるとともに、操作部材の突出方向に沿ってコイルばね3a、3b、3c、3dの少なくとも一部が第1連動部材5および第2連動部材6とオーバーラップすることを特徴とする。
(もっと読む)
操作子装置
【課題】ねじりコイルバネの暴れによる衝撃や衝突音を抑制する。
【解決手段】ねじりコイルバネ20は、巻回部23と巻回部23の軸中心C0に直交する方向に延設される脚部21、22とを有する。回動体51には支持軸52、駆動部53が設けられる。ねじりコイルバネ20の装着状態で且つ操作子56の非操作状態においては、脚部21、22が開脚状態でなおかつ脚部係合部54a、54bによって互いが開く方向に押圧されることで、ねじりコイルバネ20に付勢力F1が働き、支持軸52の外周の下部に巻回部23の内周の下部が当接して、巻回部23が支持軸52に支持される。中立状態から操作子56を右方に操作して回動体51が時計方向に回動する際、駆動部53が脚部21を駆動し、脚部21は脚部係合部54aから離れて開く方向に変位するが、脚部22は脚部係合部54bに係止されて動きが規制される。
(もっと読む)
操作子装置
【課題】外観部品を2軸基準に位置決めでき、外観品質を高めることができる。
【解決手段】子ユニット30は、第1の軸中心AX1の周りに親ユニット10に対して相対的に回動自在で、操作子56を有する孫ユニット50は、第1の軸中心AX1に直交する第2の軸中心AX2の周りに子ユニット30に対して相対的に回動自在である。軸中心AX1、AX2の位置は子ユニット30に対して固定される。互いに平行でない第1の回動軸31及び突起軸33と第2の回動軸38とが子ユニット30に固定され、子ユニット30における外観部品の全てであるホイール41が、軸中心AX1に直交する方向に対して第1の回動軸31に直接位置決めされると同時に軸中心AX2に直交する方向に対して第2の回動軸38に直接位置決めされている。
(もっと読む)
操作子装置
【課題】軸方向の位置決め精度を高めて、円滑な回動による良好な操作感触を実現する。
【解決手段】孫ユニット50の操作子56の操作により、子ユニット30は孫ユニット50と共に、第1の軸中心AX1の周りに親ユニット10に対して相対的に回動する。子ユニット30において、第1の軸中心AX1に平行な方向の第1の端部31には被係合部40が設けられ、親ユニット10の第1の壁部19には軸受け穴53が形成される。係合部15と被係合部40とが係合することで、第1の壁部19における係合部15の外側対向面19a及び内側対向面19bを有する肉部を、被係合部40の外側規制部43及び内側規制部45が両側から挟み、親ユニット10、子ユニット30におけるそれぞれの一方の端部において第1の軸中心AX1の軸線方向における両ユニット同士の位置決めがなされる。
(もっと読む)
操作子装置
【課題】回動中心に対する操作子の位置決めを正確にすると共に強度を高める。
【解決手段】孫ユニット50は、直接操作される操作子56と、操作子56とは別体に構成され、操作子56の下半部を覆い操作子56と一体となって可動するカバー体51とを有する。第2のロータリボリューム39は子ユニットに配設される。第2のロータリボリューム39の第2の回動軸38は第2の軸中心AX2を軸芯とする。操作子56の軸挿通穴56cに第2の回動軸38が挿通され、操作子56は、第2の軸中心AX2の周りに子ユニットに対して相対的に回動自在なように、第2の回動軸38に直接軸支される。
(もっと読む)
操作子装置
【課題】安定した回動と回動量の高い検出精度を実現すると共に、大型化を避ける。
【解決手段】子ユニット30は、第1の軸中心AX1の周りに親ユニット10に対して相対的に回動自在で、操作子56を有する孫ユニット50は、第1の軸中心AX1に直交する第2の軸中心AX2の周りに子ユニット30に対して相対的に回動自在である。孫ユニット50は、第2の軸中心AX2の延長方向における操作子56の両側の位置である両端部において、同心の第2の回動軸38及び軸部64を介して子ユニット30に両持ち構造で軸支される。
(もっと読む)
操作子装置の取り付け構造
【課題】螺着固定可能な取り付け角度の範囲を広くし、楽器本体の取付部に応じた取り付け角度にて操作子装置を取り付けられるようにする。
【解決手段】操作子装置はホイールとステイとを有して一体的に構成され、パネルに被取付部Sが螺着固定されることで楽器本体に取り付けられる。被取付部Sにおいて、板状部24の取付部当接面25の反対側に凸部26が一体に設けられ、板状部24から凸部26にかけて締結用貫通穴27が形成される。ボス11の先端面12に取付部当接面25を当接させ、締結用貫通穴27を通じてボス11のネジ穴13にネジ30を下方から螺合する。締結用貫通穴27は、ネジ30の軸部33が挿通可能で且つ頭部31が挿通不能な大きさである。凸部26は下方の凸の凸曲面(例えば柱面)である。座面32は凸部26に対して接触線L1にて線接触状態で当接する。
(もっと読む)
位置検出装置
【課題】 特に、従来に比べてコストを抑えるとともに信頼性に優れた位置検出装置を提供することを目的とする。
【解決手段】 シフトレバー2と、シフトレバー2の上端部に設けられたシフトノブ10と、下端部に設けられた電極部21と、シフトレバー2を回動可能に支持する動作支点25と、電極部21と非接触にて配置された静電容量結合型センサ20と、を有する。シフトノブ10の移動操作によりシフトレバー2が回動して電極部21が前記静電容量結合型センサ20の表面を非接触を保って移動し、静電容量結合型センサ20では、電極部21の移動に伴う静電容量変化に基づいて、電極部21の位置を検出する。これによりシフトポジション情報及び各シフトポジション間の軌跡情報を取得することができる。
(もっと読む)
力覚提示装置及びそのポジショニング方法
【課題】ポジショニングを迅速に完了する、力覚提示装置及びそのポジショニング方法を提供する。
【解決手段】力覚提示装置及びそのポジショニング方法は、マイクロプロセッサ30によりモーター23の正方向または逆方向の定速回転を制御し、不等間隔のブロッキング回折格子28を動かして検出器25を通過させ、オン信号またはオフ信号を生成し、タイマー装置31により検出器のオン信号またはオフ信号の時間を測定して、ブロッキング回折格子が通過した角度を計算し、メモリ装置32に保存された絶対角度と照合して、ブロッキング回折格子の絶対角度を決定し、ジョイスティック21のポジショニングを完了する。
(もっと読む)
ジョイスティック装置及び位置入力制御装置
【課題】従来のジョイスティック装置では、入力部が操作ボタンであったため、操作レバーの操作に基づく制御動作に対する微調整を行うことが難しく、制御の微調整を行うためには操作者の熟練性を要していた。
【解決手段】把持部16を有し且つ揺動可能に支持されて揺動姿勢に応じて第1の相対位置情報を出力する操作レバー2と、この操作レバーの把持部に設けられ且つ指が接触することで第2の相対位置情報を出力するタッチパネル20と、を備えて構成されている。
(もっと読む)
ジョイスティック装置
【課題】操作軸の傾動操作方向を、操作軸の傾動に応じて移動するマグネットの磁気センサに対する相対位置変化に応じて検出するジョイスティック装置において、操作軸の傾動にかかわらずマグネットおよび磁気センサ間の距離を一定に保持し、検出精度のばらつきを抑制する。
【解決手段】ケースに固定される基板に対向するベース60と、操作軸が首振り可能に連結されるマグネットホルダ58との間に配置されるスライダ59に、操作軸の軸線に直交する第1の直線方向にマグネットホルダ58が相対移動するのをガイドするとともに第1の直線方向とは直交する第2の直線方向にマグネットホルダ58が相対移動するのを阻止するようにしてマグネットホルダ58が連結され、スライダ59およびベース60間に、スライダ59が第2の直線方向に移動するのをガイドするガイド機構が設けられる。
(もっと読む)
ジョイスティック装置
【課題】ダイヤルノブが一端に結合される回転筒およびケース間に、回転筒の回転位置を検出する回転位置検出手段が設けられるジョイスティック装置において、回転筒の回転位置を磁気センサで検出するにあたって回転筒の軸方向に沿う磁気センサの配置上の自由度を高めるとともに必要とされるマグネットの個数を少なくする。
【解決手段】回転位置検出手段87が、回転筒80に設けられる駆動ギヤ88と、駆動ギヤ88に噛合する被動ギヤ90が外周に設けられる回転体89と、回転体89にその周方向に間隔をあけて設けられる複数のマグネット91と、回転体89の回転に伴うマグネット91との相対位置変化に応じて回転筒80の回転位置を検出すべく回転体89の他端部に対向してケース17に配設される磁気センサ92とを備える。
(もっと読む)
内視鏡の湾曲操作装置、及びそれを用いた内視鏡装置
【課題】湾曲操作部の構成を簡素化することができ、湾曲操作部全体を小型化するうえで有利となり、製造コストを低減することができる内視鏡の湾曲操作装置、及びそれを用いた内視鏡装置を提供する。
【解決手段】湾曲操作部31は、操作部を構成するフレーム38の半球形状のガイド面38aに湾曲操作部31のワイヤ固定部36aに設けられたOリング39を圧接させた際の摩擦力で、傾倒操作される操作軸32aの傾倒操作位置を保持して湾曲部の湾曲状態を維持する摩擦力保持部50を設けた。
(もっと読む)
左右連動操作装置
【課題】左右のグリップ間に操作ガタを生じ難くすることができる左右連動操作装置を提供する。
【解決手段】左右のグリップは、ボールジョイント4と4本のワイヤーケーブルとを介して連結される。グリップは、一方の操作がワイヤーケーブルを介して他方に伝達されることにより、左右のグリップが連動する。グリップは、ボールジョイント4を介してグリップ支持部に接続される。ボールジョイント4の球頭部8は、一対の挟持板41,42によって挟持されて、これら挟持板41,42のガタ調整ねじ締結部46,47を複数のガタ調整ねじ45によって締付量を調整して締結させる。そして、過荷重操作されたときには、過荷重による負荷をガタ調整ねじ締結部46,47に分散させる。
(もっと読む)
シフト装置
【課題】車両等に搭載される障害物検出装置と連携し、障害物の存在または接近等をシフトレバーの操作感覚の変化によって提示するシフト装置を提供する。
【解決手段】シフト装置は、シフトレバーと、シフトレバーに反力を生じさせるXモータ及びYモータとを備える。メモリには、通常の操作に対して設定される通常パターンP0と特別な操作に対して設定される特別パターンP1,P2,P3の力覚パターンデータがそれぞれ記憶される。力覚制御部は、障害物センサが車両近くの障害物を検出しているときには、シフトレバーに振動を加えたり操作荷重を増したりする等の通常とは異なる特別パターンで力覚制御を行う。これにより、シフトレバーを介して利用者に障害物の存在を認識させるとともに、危険な運転操作に対する注意を喚起することができる。
(もっと読む)
シフト装置
【課題】不正なアタックが困難な位置に簡素な構成のロック機構を設けることにより、小型でかつ防犯性が高いシフト装置を提供する。
【解決手段】シフトレバー2を中立位置でロックするロック機構として、シフトレバー2のシャフト11の基端部に嵌合するロックソレノイド40をシフト装置1の下部に設ける。シフトレバー2の操作範囲を規定するゲートブロック20と、シフト装置1の下部板であるベースプレート4dとの間のスペースにロックソレノイド40を配置することで、外部からのロック解除等の不正なアタックを極めて困難にする。かかる小型で簡素なロック機構を有するロック装置1により、車両における防犯性を高める。
(もっと読む)
1 - 20 / 163
[ Back to top ]