
Fターム[3J102DA16]の内容
その他の軸受(磁気軸受、静圧軸受等) (9,013) | 磁気軸受の構造 (1,432) | 固定側と可動側の磁石の対応構造 (1,276) | 磁石にヨークを設けたもの (104)
Fターム[3J102DA16]に分類される特許
1 - 20 / 104
磁気軸受機構
【課題】磁気軸受機構において、部品点数や消費電流の増加を抑制しつつ、ロータに外力方向逆側の力を作用させる。
【解決手段】外力が作用するロータと、ロータの外周面を覆う筒部、筒部の軸方向両側のうち外力方向に形成される第1端壁部、及び筒部の軸方向両側のうち外力方向逆側に形成される第2端壁部を有するステータコアと、第1端壁部からロータに作用する上記外力方向への吸引力、及び上記第2端壁部から上記ロータに作用する上記外力方向逆側への吸引力の双方を発生させるようにステータコアの筒部内に固定される永久磁石とを備えた磁気軸受機構について、上記ステータコア及びロータの一方又は両方を、永久磁石に起因する上記外力方向逆側への吸引力が、永久磁石に起因する上記外力方向への吸引力よりも大きくなるように構成する。
(もっと読む)
磁気浮上装置

【課題】 ゼロパワー制御により電磁石への励磁電流を常にゼロに収束させる方式において、定常的な外力に起因する浮上体の位置変動を抑制することができ、且つ動的な外力が作用した場合でも良好な追従性を得る。
【解決手段】 浮上体10と、浮上体10に永久磁石及び電磁石による磁気回路を形成する磁石ユニット23と、磁石ユニット23を固定する可動枠22と、可動枠22を支持する固定枠21と、固定枠21に対して可動枠22を支持すると共に固定枠21と可動枠22との距離を調整可能な可動枠支持機構27と、浮上体10と磁石ユニット23との相対変位を測定する第1のセンサ24と、固定枠21と可動枠22との相対変位を測定する第2のセンサ25と、第1及び第2のセンサ24,25の各出力に応じて電磁石の電流を制御することにより浮上体10を安定的に非接触支持する制御部と、を備えた。
(もっと読む)
ロール装置
【課題】装置の低廉化、エア消費量の削減を図り得ると共に、部品点数を削減し得、組み立て工数を減少し得、しかも、ラジアル方向の磁気による吸着力が不均一となってラジアル方向の負荷容量が低下する虞をなくし得るロール装置を提供すること。
【解決手段】ロール装置1は、中空のロール体2と、ロール体2の中空部に隙間3をもって挿通されている軸体4と、ラジアル方向に関してロール体2を静圧気体によって支持すべくロール体2と軸体4との間に介在されている静圧気体軸受手段7及び8と、スラスト方向に関してロール体2を磁力によって支持する磁性軸受手段9及び10とを具備している。
(もっと読む)
カムフォロア
【課題】装置の低廉化、エア消費量の削減を図り得るカムフォロアを提供すること。
【解決手段】カムフォロア1は、中空の転動体2と、転動体2の中空部に隙間3をもって挿通されている軸体4と、ラジアル方向に関して転動体2を静圧気体によって支持すべく転動体2と軸体4との間に介在されている静圧気体軸受手段7と、スラスト方向に関して転動体2を磁力によって支持する磁性軸受手段9及び10とを具備している。
(もっと読む)
磁気軸受装置および磁気浮上ステージ
【課題】電磁石ターゲットを挟むように電磁石および永久磁石を設けた構成において、支持する浮上体の重量が変化した場合にも、所望の磁気軸受特性を維持することが可能な磁気軸受装置を提供する。
【解決手段】このスラスト磁気軸受装置100(磁気軸受装置)は、浮上体110に取り付けられ、磁性材からなる電磁石ターゲット1と、上側磁極部21と励磁コイル22とを含み、電磁石ターゲット1に対向するように配置され、電磁石ターゲット1を磁気吸引力により支持するスラスト電磁石2と、電磁石ターゲット1のスラスト電磁石2とは反対側の部分に対向するように配置され、電磁石ターゲット1を磁気吸引力により吸引する永久磁石31を含むスラスト磁極3とを備え、電磁石ターゲット1とスラスト磁極3との距離を調整可能に構成されている。
(もっと読む)
ロール装置
【課題】装置の低廉化、エア消費量の削減を図り得るロール装置を提供すること。
【解決手段】ロール装置1は、中空のロール体2と、ロール体2の中空部に隙間3をもって挿通されている軸体4と、ラジアル方向に関してロール体2を静圧気体によって支持すべくロール体2の両端部5及び6に夫々配されていると共にロール体2と軸体4との間に夫々介在されている一対の静圧気体軸受7及び8と、スラスト方向に関してロール体2を磁力によって支持する磁性軸受9とを具備している。
(もっと読む)
カムフォロア
【課題】回転摩擦を低減させると共に回転速度を向上させることができ、しかも、使用期間の長期化を図り得ると共にランニングコストをも低減させ得るカムフォロアを提供すること。
【解決手段】カムフォロア1は、中空の転動体2と、転動体2の中空部に隙間3をもって挿通されていると共に一端部21が転動体2から突出している軸体4と、ラジアル方向に関して転動体2を静圧気体によって支持すべく転動体2と軸体4との間に介在されている静圧気体軸受7と、スラスト方向に関して転動体2を磁力によって支持する磁性軸受9とを具備している。
(もっと読む)
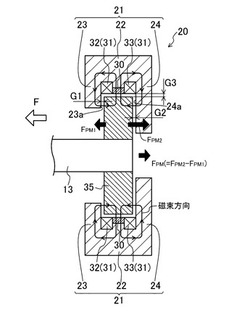
ターボ分子ポンプ
【課題】コスト上昇を抑えつつエレクトリカルランアウトを防止できるターボ分子ポンプの提供。
【解決手段】ターボ分子ポンプは、複数段の回転翼32が形成されたロータ30と、回転翼32に対して回転軸方向に交互に配置された複数段の固定翼22と、ロータ30が固定され、モータ36により回転駆動されるシャフト12と、シャフト12を磁気浮上させる磁気軸受37a,37b,38と、シャフト12の磁気浮上位置を検出する渦電流式ギャップセンサ27a,27b,28とを備え、ラジアルセンサ27a,27bの検出対象として非磁性金属から成るターゲット部材13,14と、スラストセンサ28の検出対象として非磁性金属で形成されたロータディスク15とが設けられている。なお、ターゲット部材13およびロータディスク15を、シャフト12に着脱可能に固定するようにしても良い。
(もっと読む)
アキシャル型磁気浮上モータおよびアキシャル型磁気浮上モータを備えたアキシャル型磁気浮上遠心ポンプ
【課題】小型軽量で高いトルクが発生でき、軸方向位置および回転制御と傾き制御の簡単な構成、軸方向位置および回転制御と傾き制御の容易なアキシャル型磁気浮上モータおよびアキシャル型磁気浮上遠心ポンプを提供する。
【解決手段】上部ステータの突極にロータの軸方向位置および回転制御を行なう上部軸方向位置・回転制御用コイルおよびロータの傾き制御を行なう上部傾き制御用コイルを巻回して設ける。下部ステータの突極にロータの軸方向位置および回転制御を行なう下部軸方向位置・回転制御用コイルおよびロータの傾き制御を行なう下部傾き制御用コイルを巻回して設ける。上部軸方向位置・回転制御用コイルおよび上部傾き制御用コイルと下部軸方向位置・回転制御用コイルおよび下部傾き制御用コイルをロータの軸線方向に沿って対称的に配置する。上部ステータと下部ステータでロータの回転制御を行なう。
(もっと読む)
磁気ベアリング、回転段及び反射型電子ビームリソグラフィ装置
回転軸を持つ磁気ベアリングが、強磁性材料を有する円筒状ローターであって、上記円筒状ローターが、対称軸を持ち、上記円筒状ローターは、内側半径を持ち、上記円筒状ローターが、上部を持つ、円筒状ローターと、静的なハブであって、上記静的なハブが、該静的なハブから突出し、上記上部に隣接して配置されるオーバーハングを持つ、静的なハブと、上記第1の面と上記オーバーハングとの間の距離を制御するリフト磁気アクチュエータ装置と、上記内側半径と上記回転軸との間の距離を制御する半径方向の磁気アクチュエータ装置とを有する。 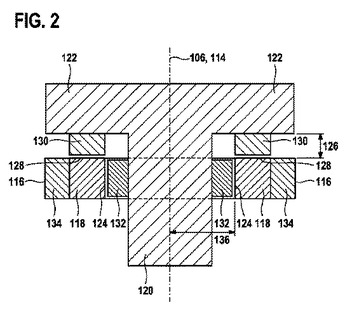 (もっと読む)
(もっと読む)
ターボ分子ポンプシステム
【課題】簡単かつ安価な構成により磁気軸受システムを構成し、水蒸気排気速度の増大に対応可能なターボ分子ポンプを提供する。
【解決手段】高温超伝導磁気軸受をポンプロータの軸端に設け、クライオトラップを用いた冷凍機で高温超伝導磁気軸受を冷却するよう構成したので、被支持体のパラメータの変化(例えば、回転翼の重量増大)に応じて、排気速度、支持能力、および減衰能を増大させ、高温超伝導磁気軸受部の付加コストも極小にすることができる。
(もっと読む)
制御型磁気軸受装置
【課題】 面倒な制御ゲインテーブルを作成する必要がなく、磁気浮上運転前の調整に時間を要しない制御型磁気軸受装置を提供する。
【解決手段】 制御型磁気軸受装置は、回転体4を1つの水平な制御軸X方向の所定の目標位置に磁気吸引力により非接触支持するために前記制御軸X方向の両側から回転体4を挟むように配置された1対の電磁石29Xa,29Xbを備えているものであって、回転体4の目標位置からの前記制御軸X方向の変位を検出する変位検出手段と、回転体を目標位置に支持するために各電磁石29Xa,29Xbに一定のバイアス電流および回転体4の前記変位によって変化する制御電流からなる励磁電流を供給する電磁石制御手段とを備えている。電磁石制御手段が、バイアス電流を常に0とするゼロバイアス制御を行うもので、かつ、前記変位に応じて適応的に変化するゲインで負帰還する単純適応制御を行うものである。
(もっと読む)
浮上体のセンシング方法
【課題】センサ不使用による低コスト化と省スペース化が図れると共に、浮上体位置の検知精度を向上できる浮上体のセンシング方法を提供する。
【解決手段】磁気浮上している浮上体10の周囲に配置され、それぞれコア11、12とコア11、12に巻回されたコイル13、14とを有する複数の電磁石15、16を用いて浮上体10をセンシングする方法であって、各コイル13、14に共振回路17、18を形成するコンデンサ19、20をそれぞれ直列又は並列に設け、各コイル13、14間の電圧から浮上体10の位置を検出する。
(もっと読む)
磁気軸受
【課題】工作機械の振動を低減して、工作機械の加工精度を向上させることができる磁気軸受を提供すること。
【解決手段】主軸2にラジアルロータ80及びアキシャルロータ90が取り付けられており、ラジアルロータ80及びアキシャルロータ90を浮遊状態に保持するXステータ81、Yステータ85及びZステータ91がケース6に取り付けられている。そのXステータ81、Yステータ85及びZステータ91は、それぞれX圧電素子84、Y圧電素子88及びZ圧電素子94を備えており、それら圧電素子は、制御装置7によって制御されることで伸縮される。その伸縮により、ラジアルロータ80及びアキシャルロータ90の浮遊位置が移動され、主軸2に取着されるエンドミルEがケース6に対して移動されるので、フライス盤100の振動を低減してフライス盤100の加工精度を向上させることができる。
(もっと読む)
燃料電池用圧縮機
【課題】固有振動数の低下の原因となる回転部分の全長の長大化を生じることなしに、ラジアルフォイル軸受22、31により、電動モータ13の回転軸10をできるだけ低速で速やかに浮上させると共に前記浮上を安定して維持できる燃料電池用圧縮機6を提供する。
【解決手段】前記ラジアルフォイル軸受22、31を、電動モータ13のステータ12の、軸方向の両端より外側に設けると共に、前記ステータ12の軸方向内方に凹入させて設けた空間52、56内にも挿入させて配置した。
(もっと読む)
遠心式ポンプ装置
【課題】インペラをスムーズに回転起動させることが可能な小型の遠心式ポンプ装置を提供する。
【解決手段】この遠心式血液ポンプ装置は、血液室7内に設けられたインペラ10と、インペラ10の一方面に設けられた永久磁石15と、血液室7の内壁に設けられた永久磁石16と、インペラ10の他方面に設けられた永久磁石17と、モータ室8内に設けられ、隔壁6を介してインペラ10を回転駆動させる磁性体18およびコイル20とを備える。インペラ10に対向する隔壁6および血液室7の内壁にそれぞれ動圧溝21,22を形成する。したがって、コイル電流を制御することにより、インペラ10をスムーズに回転起動させることができる。
(もっと読む)
磁気軸受
【課題】制御性に優れ、より一層の小型化及び軽量化が図れるハイブリッド型の磁気軸受を提供する。
【解決手段】ステータ10と、このステータ10に磁気力によって非接触状態で支持されて回転するロータ20とを有する磁気軸受において、励磁コイル14が巻回された主突極13と主突極13の間の連結部12に、一端がロータ20に向けて連結部12から突出する板状のバイアス用永久磁石15が挿入され、バイアス用永久磁石15の径方向突出部の両面に、バイアス用永久磁石15の着磁面と異極性をロータ20側、同一極性を連結部12側にして第1及び第2の磁束吸収用磁石16,17が配置されている。これら磁束吸収磁石16,17は、バイアス磁束を継鉄11側に閉じ込める機能を有する。
(もっと読む)
磁気軸受の磁気軸受及びこのシステムを用いた回転機械
【課題】磁気軸受により支持された回転軸に生じる捩り振動を、磁気軸受を制御することにより効率的に減衰することが可能な磁気軸受及びこの磁気軸受を用いた回転機械を提供する。
【解決手段】回転軸7の周方向に沿って配置され、互いに釣合う方向の磁気力を作用させる複数のコイル11と、前記磁気力によって前記回転軸7に生じる変位を検出する変位センサ14と、前記コイル11を個々に制御するドライバ16とを備え、前記変位センサ14の検出信号に基づいて前記コイル11に供給する電流を制御して前記変位を調整可能に構成された磁気軸受10であって、前記ドライバ16から前記コイル11に回転磁界を付与する制御部17を備え、前記制御部17は、前記コイル11に前記回転軸7の回転数に応じた回転磁界を発生させるように構成されていることを特徴とする。
(もっと読む)
磁気軸受装置
【課題】 センサの対ノイズ性を劣化させずに、ラジアル磁気軸受の負荷容量の増大を可能とし、これにより、内面研削盤のように全周波数域における高剛性化が必要な装置への搭載を好適なものとした磁気軸受装置を提供する。
【解決手段】 軸受ターゲット部22,23の外径がセンサターゲット部24,25の外径よりも大きくなされるとともに、軸受ターゲット部22,23の材質の耐力がセンサターゲット部24,25の耐力よりも大きくなされている。
(もっと読む)
物体を支持するための方法
【課題】コンパクトに構成された簡単に取り付け可能な磁気軸受装置が使用可能である物体の位置のための簡単な測定方法を提供する。
【解決手段】磁気軸受装置において、支持コイルが直列に接続されていて、支持コイルに電流が供給可能である。両支持コイル(14,14’)を接続する点(18)と電圧源との結合によって支持コイルが操作要素として使用され、支持コイル(14,14’)への電圧パルスの供給によって、支持すべき物体(10)の位置のための間接証拠である支持コイル(14および14’)のインダクタンスが推定され。それにより位置調節が可能にされる。したがって、同一の支持コイル(14および14’)により、安定に調節される支持力をもたらすと同時に、位置センサの代役を努めることができる。
(もっと読む)
1 - 20 / 104
[ Back to top ]